矿山自动驾驶感知能力测试场景库构建方法及测试方法
本发明涉及自动驾驶,尤其涉及一种矿山自动驾驶感知能力测试场景库构建方法及测试方法。
背景技术:
1、随着自动驾驶技术的发展,自动驾驶技术由低级自动驾驶走向高阶自动驾驶。自动驾驶测试作为评估自动驾驶汽车性能的核心环节,在整个自动驾驶开发闭环中占据了越来越重要的位置。而环境感知作为自动驾驶技术的基础任务,其表现关乎上游决策规划等任务的有效性。因此,环境感知的测试在整个自动驾驶测试体系中格外重要,不仅关乎自动驾驶的效率,更关乎自动驾驶运行过程中的安全性。如何构建感知能力测试场景库是很多自动驾驶研发人员重点关注的问题。
2、目前,在一些通用区域,如城市区域和港口区域,已经有比较成熟的自动驾驶感知能力测试场景库构建方法,并且已经有一部分开源数据可以为自动驾驶研究人员提供相关的研究数据。但是,在一些特定区域,如重点关注的露天矿山区域,相关的感知能力测试场景库构建方法还处于研究空白。而且,由于露天矿山区域的特殊性,其并不能采用与城市等其他区域通用的构建方法来实现感知能力测试场景库的构建。
3、基于此,现急需提供一种矿山自动驾驶感知能力测试场景库构建方法,以弥补现有技术的空白。
技术实现思路
1、本发明提供一种矿山自动驾驶感知能力测试场景库构建方法及测试方法,用以解决现有技术中存在的缺陷。
2、本发明提供一种矿山自动驾驶感知能力测试场景库构建方法,包括:
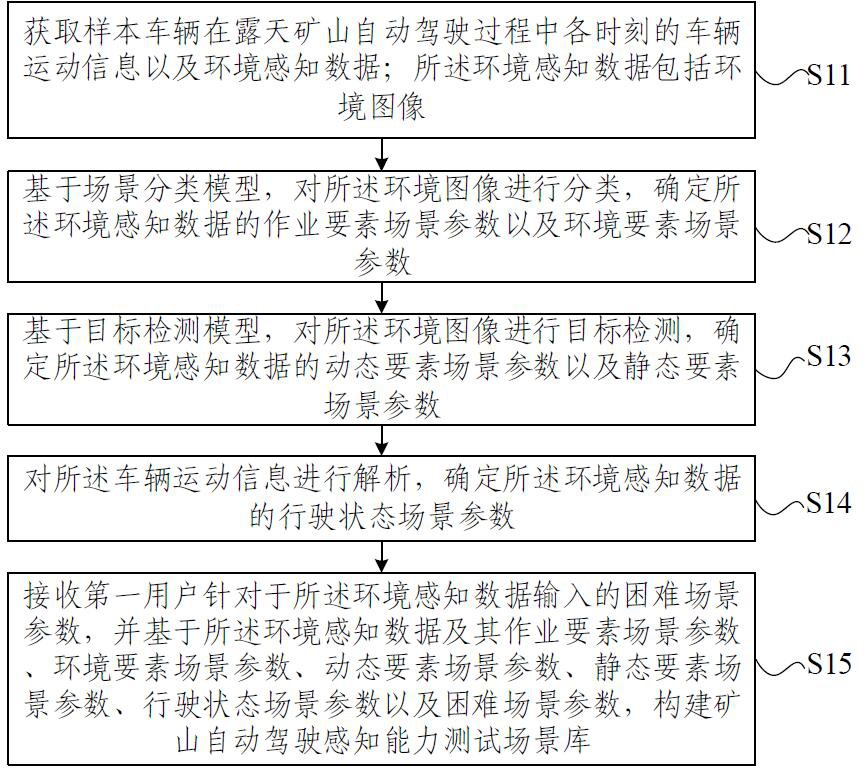
3、获取样本车辆在露天矿山自动驾驶过程中各时刻的车辆运动信息以及环境感知数据;所述环境感知数据包括环境图像;
4、基于场景分类模型,对所述环境图像进行分类,确定所述环境感知数据的作业要素场景参数以及环境要素场景参数;
5、基于目标检测模型,对所述环境图像进行目标检测,确定所述环境感知数据的动态要素场景参数以及静态要素场景参数;
6、对所述车辆运动信息进行解析,确定所述环境感知数据的行驶状态场景参数;
7、接收第一用户针对于所述环境感知数据输入的困难场景参数,并基于所述环境感知数据及其作业要素场景参数、环境要素场景参数、动态要素场景参数、静态要素场景参数、行驶状态场景参数以及困难场景参数,构建矿山自动驾驶感知能力测试场景库。
8、根据本发明提供的一种矿山自动驾驶感知能力测试场景库构建方法,所述作业要素场景参数包括所述样本车辆的作业位置要素参数;
9、所述环境要素场景参数包括天气要素场景参数以及光线要素场景参数;
10、所述动态要素场景参数包括所述样本车辆周围的动态交通参与者的类别参数;
11、所述静态要素场景参数包括所述样本车辆周围的静态交通参与者的类别参数;
12、所述行驶状态场景参数包括所述样本车辆执行的驾驶操作参数;
13、所述困难场景参数包括遮挡场景参数、碰撞场景参数以及异常场景参数中的一种。
14、根据本发明提供的一种矿山自动驾驶感知能力测试场景库构建方法,所述环境感知数据还包括所述样本车辆在露天矿山自动驾驶过程中各时刻的点云数据及位置信息。
15、根据本发明提供的一种矿山自动驾驶感知能力测试场景库构建方法,所述环境感知数据的类别包括真实生产环境下采集的真实环境感知数据以及虚拟仿真环境下获取的合成环境感知数据。
16、本发明还提供一种矿山自动驾驶感知能力测试方法,包括:
17、接收第二用户的场景需求指令;
18、基于所述场景需求指令,对矿山自动驾驶感知能力测试场景库中的环境感知数据按场景参数进行筛选,生成测试用例;所述矿山自动驾驶感知能力测试场景库基于上述的矿山自动驾驶感知能力测试场景库构建方法得到;
19、基于所述测试用例,对目标车辆的矿山自动驾驶感知能力进行测试。
20、根据本发明提供的一种矿山自动驾驶感知能力测试方法,所述测试用例包括真实生产环境下的真实测试用例以及虚拟仿真环境下的合成测试用例;
21、所述基于所述测试用例,对目标车辆的矿山自动驾驶感知能力进行测试,包括:
22、基于所述真实测试用例以及所述合成测试用例,在真实生产环境以及虚拟仿真环境下,对所述目标车辆的矿山自动驾驶感知能力进行融合测试。
23、根据本发明提供的一种矿山自动驾驶感知能力测试方法,所述基于所述测试用例,对目标车辆的矿山自动驾驶感知能力进行测试,之后包括:
24、若测试所得分数小于预设阈值,将所述测试用例对应的目标场景进行反馈,并重新在所述目标场景下,对所述目标车辆的矿山自动驾驶感知能力进行测试。
25、本发明还提供一种矿山自动驾驶感知能力测试场景库构建系统,包括:
26、数据获取模块,用于获取样本车辆在露天矿山自动驾驶过程中各时刻的车辆运动信息以及环境感知数据;所述环境感知数据包括环境图像;
27、场景分类模块,用于基于场景分类模型,对所述环境图像进行分类,确定所述环境感知数据的作业要素场景参数以及环境要素场景参数;
28、目标检测模块,用于基于目标检测模型,对所述环境图像进行目标检测,确定所述环境感知数据的动态要素场景参数以及静态要素场景参数;
29、信息解析模块,用于对所述车辆运动信息进行解析,确定所述环境感知数据的行驶状态场景参数;
30、测试场景库构建模块,用于接收第一用户针对于所述环境感知数据输入的困难场景参数,并基于所述环境感知数据及其作业要素场景参数、环境要素场景参数、动态要素场景参数、静态要素场景参数、行驶状态场景参数以及困难场景参数,构建矿山自动驾驶感知能力测试场景库。
31、本发明还提供一种矿山自动驾驶感知能力测试系统,包括:
32、指令接收模块,用于接收第二用户的场景需求指令;
33、测试用例生成模块,用于基于所述场景需求指令,对矿山自动驾驶感知能力测试场景库中的环境感知数据按场景参数进行筛选,生成测试用例;所述矿山自动驾驶感知能力测试场景库基于上述的矿山自动驾驶感知能力测试场景库构建方法得到;
34、测试模块,用于基于所述测试用例,对目标车辆的矿山自动驾驶感知能力进行测试。
35、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述的矿山自动驾驶感知能力测试场景库构建方法,或如上述任一种所述的矿山自动驾驶感知能力测试方法。
36、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的矿山自动驾驶感知能力测试场景库构建方法,或如上述任一种所述的矿山自动驾驶感知能力测试方法。
37、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的矿山自动驾驶感知能力测试场景库构建方法,或如上述任一种所述的矿山自动驾驶感知能力测试方法。
38、本发明提供的矿山自动驾驶感知能力测试场景库构建方法及测试方法,该构建方法充分考虑露天矿山区域的特殊性,根据露天矿山的环境特点,构建面向露天矿山的完备的矿山自动驾驶感知能力测试场景库,可以用于矿山自动驾驶车辆的环境感知能力的测试,从而有效评估和提升自动驾驶车辆的环境感知能力,全面解决露天矿山自动驾驶感知能力评估的难题,推动露天矿山自动驾驶的生产落地应用。
- 还没有人留言评论。精彩留言会获得点赞!