一种基于无人机序列图像的田间杂草定位方法和系统
本发明属于植物监测,尤其涉及一种基于无人机序列图像的田间杂草定位方法和系统。
背景技术:
1、草害是一类持续性危害的农业有害生物。杂草治理的手段包括人工除草、机械除草、生物除草以及化学除草。其中,化学除草仍然是主要的手段。
2、为了解决上述问题,论文《目标三维定位的单目视觉方法研究》(计算机软件及计算机应用,2022年)提出了基于单目视觉的目标定位方法,弥补了传统管理方法中人力与物力成本,通过3d检测单个独立物体,以单一视角进行场景捕获,定位杂草位置,为智能除草领域提供新兴技术。然而,单目视觉的目标定位方法通常要依赖场景中一定的几何约束,导致其泛化能力差,更突出的问题是单目深度估计只用单张图片,在深度估计、环境感知与视角等方面出现定位不准确或精度不高等问题。
技术实现思路
1、本发明针对现有技术中的不足,提供一种基于无人机序列图像的田间杂草定位方法和系统。
2、第一方面,本发明提供一种基于无人机序列图像的田间杂草定位方法,包括:
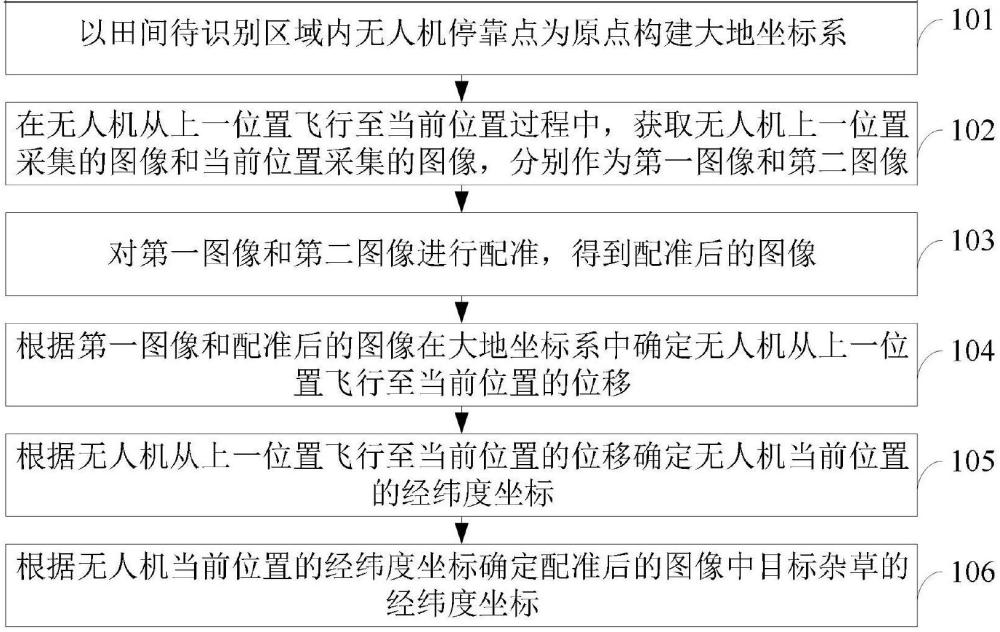
3、以田间待识别区域内无人机停靠点为原点构建大地坐标系;
4、在无人机从上一位置飞行至当前位置过程中,获取无人机上一位置采集的图像和当前位置采集的图像,分别作为第一图像和第二图像;
5、对第一图像和第二图像进行配准,得到配准后的图像;
6、根据第一图像和配准后的图像在大地坐标系中确定无人机从上一位置飞行至当前位置的位移;
7、根据无人机从上一位置飞行至当前位置的位移确定无人机当前位置的经纬度坐标;
8、根据无人机当前位置的经纬度坐标确定配准后的图像中目标杂草的经纬度坐标。
9、进一步地,所述以田间待识别区域内无人机停靠点为原点构建大地坐标系,包括:
10、根据以下公式计算无人机在经度方向和纬度方向上的系统误差:
11、
12、其中,田间待识别区域内设置有m行n列的特征点阵列,共有m×n个特征点;d1为第i行第j列的特征点aij到第p行第q列特征点apq的实际距离;i=1,2,…,m;j=1,2,…,n;p=1,2,…,m;q=1,2,…,n;i≠p或j≠q;d2为第i行第j列的特征点aij到第k行第l列特征点akl的实际距离;k=1,2,…,m;l=1,2,…,n;i≠k或j≠l;d3为第p行第q列的特征点apr到第k行第l列特征点akl的实际距离;k≠p或l≠q;(αij,βij)为特征点aij的经纬度坐标;(αpq,βpq)为特征点apq的经纬度坐标;(αkl,βkl)为特征点akl的经纬度坐标;δα为无人机在经度方向上的系统误差;δβ为无人机在纬度方向上的系统误差;r为地球半径;
13、根据无人机在经度方向和纬度方向上的系统误差构建大地坐标系。
14、进一步地,所述对第一图像和第二图像进行配准,得到配准后的图像,包括:
15、获取第一图像和第二图像之间的变换矩阵;
16、根据变换矩阵对第二图进行变换,得到第三图像;
17、对第三图像进行重采样和变换,得到第四图像,以作为配准后的图像。
18、进一步地,所述根据第一图像和配准后的图像在大地坐标系中确定无人机从上一位置飞行至当前位置的位移,包括:
19、获取无人机拍摄的多个标定板的图像;其中标定板上均匀设置有mp行和np列的圆形图案,在任意一行或一列中相邻两个圆形图案的圆心距离为δp;
20、根据以下公式计算无人机成像在水平方向上像素当量peh和竖直方向上像素当量pev:
21、
22、
23、其中,第h个平面标定板第i1行第j1列圆形图案的中心的像素坐标为h=1,2,…,h;h为平面标定板的总数;t表示矩阵的转置;第h个平面标定板第i2行第j2列圆形图案的中心的像素坐标为第h个平面标定板第i3行第j3列圆形图案的中心的像素坐标为
24、根据以下公式计算无人机从上一位置飞行至当前位置的距离d:
25、
26、
27、其中,同一棵杂草在第一图像中的像素坐标为[u1,v1]t,在第四图像中的像素坐标为[u2,v2]t;δx和δy分别为无人机从上一个位置飞行至当前位置沿着x轴和沿着y轴方向的位移;
28、进一步地,所述根据无人机从上一位置飞行至当前位置的位移确定无人机当前位置的经纬度坐标,包括:
29、根据以下公式计算无人机当前位置的经纬度坐标:
30、
31、η=arctan(δx/δy);
32、其中,(α1,β1)为无人机上一位置的经纬度坐标;(α2,β2)为无人机当前位置的经纬度坐标;η为无人机从上一位置飞行至当前位置的的方位角;π为圆周率。
33、进一步地,所述根据无人机当前位置的经纬度坐标确定配准后的图像中目标杂草的经纬度坐标,包括:
34、根据以下公式计算目标杂草相对无人机的距离:
35、
36、
37、其中,dg为第g棵杂草相对无人机的距离;δxg和δyg分别为第g棵杂草到无人机当前位置沿着x轴和沿着y轴方向的位移;第g棵杂草在第四图像中的像素坐标为[ug,vg]t;(u0,v0)是相机的主点坐标;
38、根据以下公式计算杂草的经纬度坐标:
39、
40、ηg=arctan(δxg/δyg);
41、其中,ηg为第g棵杂草到无人机当前位置的方位角;(αg,βg)为第g棵杂草的经纬度坐标。
42、第二方面,本发明提供一种基于无人机序列图像的田间杂草定位系统,包括:
43、构建模块,用于以田间待识别区域内无人机停靠点为原点构建大地坐标系;
44、获取模块,用于在无人机从上一位置飞行至当前位置过程中,获取无人机上一位置采集的图像和当前位置采集的图像,分别作为第一图像和第二图像;
45、配准模块,用于对第一图像和第二图像进行配准,得到配准后的图像;
46、位移确定模块,用于根据第一图像和配准后的图像在大地坐标系中确定无人机从上一位置飞行至当前位置的位移;
47、第一坐标确定模块,用于根据无人机从上一位置飞行至当前位置的位移确定无人机当前位置的经纬度坐标;
48、第二坐标确定模块,用于根据无人机当前位置的经纬度坐标确定配准后的图像中目标杂草的经纬度坐标。
49、第三方面,本发明提供一种计算机设备包括处理器和存储器;其中,处理器执行存储器中保存的计算机程序时实现第一方面所述的基于无人机序列图像的田间杂草定位方法的步骤。
50、第四方面,本发明提供一种计算机可读存储介质,用于存储计算机程序;计算机程序被处理器执行时实现第一方面所述的基于无人机序列图像的田间杂草定位方法的步骤。
51、本发明提供一种基于无人机序列图像的田间杂草定位方法和系统,其中方法包括以田间待识别区域内无人机停靠点为原点构建大地坐标系;在无人机从上一位置飞行至当前位置过程中,获取无人机上一位置采集的图像和当前位置采集的图像,分别作为第一图像和第二图像;对第一图像和第二图像进行配准,得到配准后的图像;根据第一图像和配准后的图像在大地坐标系中确定无人机从上一位置飞行至当前位置的位移;根据无人机从上一位置飞行至当前位置的位移确定无人机当前位置的经纬度坐标;根据无人机当前位置的经纬度坐标确定配准后的图像中目标杂草的经纬度坐标,本发明为精准除草提供位置信息。
- 还没有人留言评论。精彩留言会获得点赞!