一种图像去噪方法、装置、电子设备及存储介质与流程
本技术涉及图像处理,特别是涉及一种图像去噪方法、装置、电子设备及存储介质。
背景技术:
1、在对待测物的三维轮廓进行重建时,可以使用投影仪向待测物投射特定的光信号,并通过相机采集包含待测物的图像。根据采集到的图像,可以确定待测物的位置和深度等信息,实现对待测物的三维轮廓进行重建。
2、然而,采集到的图像中存在相机的sensor(传感器)所产生的底噪,会降低图像的图像质量,进而,导致重建得到的三维轮廓的准确性不高。
3、因此,如何提高图像的图像质量成为亟待解决的问题。
技术实现思路
1、本技术实施例的目的在于提供一种图像去噪方法、装置、电子设备及存储介质,以提高图像的图像质量。具体技术方案如下:
2、本技术实施的第一方面,提供了一种图像去噪方法,所述方法包括:
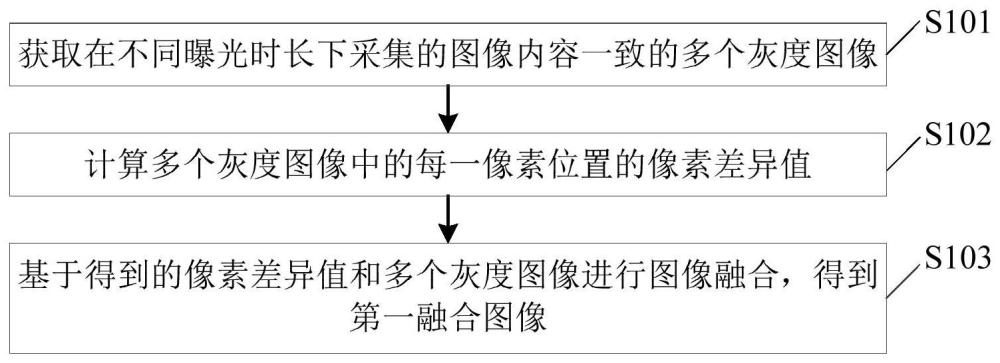
3、获取在不同曝光时长下采集的图像内容一致的多个灰度图像;
4、计算所述多个灰度图像中的每一像素位置的像素差异值;其中,任一像素位置的像素差异值表示:该像素位置在所述多个灰度图像中的各像素值的离散程度;
5、基于得到的像素差异值和所述多个灰度图像进行图像融合,得到第一融合图像;其中,所述第一融合图像中指定像素位置的像素值为所述指定像素位置的像素差异值,或者,所述第一融合图像中指定像素位置的像素值为小于第一阈值的指定像素值;所述指定像素位置的像素差异值小于第二阈值;所述第一融合图像中除所述指定像素位置以外的其他任一像素位置的像素值为:该像素位置在所述多个灰度图像中的各像素值的加权和。
6、可选的,所述指定像素位置在所述多个灰度图像中的各像素值均小于第三阈值。
7、可选的,所述基于得到的像素差异值和所述多个灰度图像进行图像融合,得到第一融合图像,包括:
8、将每一灰度图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到各灰度图像各自对应的已去噪图像;
9、计算各已去噪图像中对应像素位置的像素值的加权和,得到第一融合图像。
10、可选的,所述基于得到的像素差异值和所述多个灰度图像进行图像融合,得到第一融合图像,包括:
11、计算所述多个灰度图像中对应像素位置的像素值的加权和,得到第二融合图像;
12、将所述第二融合图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到第一融合图像。
13、可选的,在所述基于得到的像素差异值和所述多个灰度图像进行图像融合,得到第一融合图像之后,所述方法还包括:
14、在所述多个灰度图像中包含指定对象的情况下,对所述第一融合图像进行光条特征提取,得到第一光条特征;
15、基于所述第一光条特征,进行点云重建,得到所述指定对象的三维轮廓。
16、可选的,计算所述多个灰度图像中的每一像素位置的像素差异值,包括:
17、针对每一像素位置,计算该像素位置在所述多个灰度图像中的各像素值的方差,得到该像素位置的像素差异值;
18、或者,
19、针对每一像素位置,计算该像素位置在每两个灰度图像中的像素值的差值的平均值,得到该像素位置的像素差异值。
20、本技术实施的第二方面,提供了另一种图像去噪方法,所述方法包括:
21、获取在不同曝光时长下采集的图像内容一致的多个灰度图像;
22、计算所述多个灰度图像中的每一像素位置的像素差异值;其中,任一像素位置的像素差异值表示:该像素位置在所述多个灰度图像中的各像素值的离散程度;
23、将每一灰度图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到各灰度图像各自对应的已去噪图像;其中,所述指定像素位置的像素差异值小于第二阈值。
24、可选的,所述指定像素位置在所述多个灰度图像中的各像素值均小于第三阈值。
25、可选的,在所述将每一灰度图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到各灰度图像各自对应的已去噪图像之后,所述方法还包括:
26、在所述多个灰度图像中包含指定对象的情况下,分别对每一已去噪图像进行光条特征提取,得到多个第二光条特征;
27、基于各第二光条特征,进行点云重建,得到所述指定对象的目标三维轮廓。
28、可选的,所述基于各第二光条特征,进行点云重建,得到所述指定对象的目标三维轮廓,包括:
29、针对每一第二光条特征,计算该第二光条特征与预设标准光条特征之间的特征差异值;
30、基于各第二光条特征和对应的特征差异值,得到目标光条特征;
31、基于所述目标光条特征,进行点云重建,得到所述指定对象的目标三维轮廓。
32、可选的,所述基于各第二光条特征和对应的特征差异值,得到目标光条特征,包括:
33、从各第二光条特征中确定特征差异值最小的光条特征,得到目标光条特征;
34、或者,
35、基于各第二光条特征的权重,对各第二光条特征进行特征融合,得到目标光条特征;其中,任一第二光条特征的权重与该第二光条特征的特征差异值呈负相关。
36、可选的,所述基于各第二光条特征,进行点云重建,得到所述指定对象的目标三维轮廓,包括:
37、分别基于每一第二光条特征,进行点云重建,得到所述指定对象的多个初始三维轮廓;
38、对各初始三维轮廓进行融合,得到所述指定对象的目标三维轮廓。
39、可选的,计算所述多个灰度图像中的每一像素位置的像素差异值,包括:
40、针对每一像素位置,计算该像素位置在所述多个灰度图像中的各像素值的方差,得到该像素位置的像素差异值;
41、或者,
42、针对每一像素位置,计算该像素位置在每两个灰度图像中的像素值的差值的平均值,得到该像素位置的像素差异值。
43、本技术实施的第三方面,还提供了一种图像去噪装置,所述装置包括:
44、第一获取模块,用于获取在不同曝光时长下采集的图像内容一致的多个灰度图像;
45、第一计算模块,用于计算所述多个灰度图像中的每一像素位置的像素差异值;其中,任一像素位置的像素差异值表示:该像素位置在所述多个灰度图像中的各像素值的离散程度;
46、图像融合模块,用于基于得到的像素差异值和所述多个灰度图像进行图像融合,得到第一融合图像;其中,所述第一融合图像中指定像素位置的像素值为所述指定像素位置的像素差异值,或者,所述第一融合图像中指定像素位置的像素值为小于第一阈值的指定像素值;所述指定像素位置的像素差异值小于第二阈值;所述第一融合图像中除所述指定像素位置以外的其他任一像素位置的像素值为:该像素位置在所述多个灰度图像中的各像素值的加权和。
47、可选的,所述指定像素位置在所述多个灰度图像中的各像素值均小于第三阈值。
48、可选的,所述图像融合模块,具体用于将每一灰度图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到各灰度图像各自对应的已去噪图像;
49、计算各已去噪图像中对应像素位置的像素值的加权和,得到第一融合图像。
50、可选的,所述图像融合模块,具体用于计算所述多个灰度图像中对应像素位置的像素值的加权和,得到第二融合图像;
51、将所述第二融合图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到第一融合图像。
52、可选的,所述装置还包括:
53、第一光条特征提取模块,用于在所述基于得到的像素差异值和所述多个灰度图像进行图像融合,得到第一融合图像之后,在所述多个灰度图像中包含指定对象的情况下,对所述第一融合图像进行光条特征提取,得到第一光条特征;
54、第一重建模块,用于基于所述第一光条特征,进行点云重建,得到所述指定对象的三维轮廓。
55、可选的,所述第一计算模块,具体用于针对每一像素位置,计算该像素位置在所述多个灰度图像中的各像素值的方差,得到该像素位置的像素差异值;或者,针对每一像素位置,计算该像素位置在每两个灰度图像中的像素值的差值的平均值,得到该像素位置的像素差异值。
56、本技术实施的第四方面,还提供了另一种图像去噪装置,所述装置包括:
57、第二获取模块,用于获取在不同曝光时长下采集的图像内容一致的多个灰度图像;
58、第二计算模块,用于计算所述多个灰度图像中的每一像素位置的像素差异值;其中,任一像素位置的像素差异值表示:该像素位置在所述多个灰度图像中的各像素值的离散程度;
59、图像去噪模块,用于将每一灰度图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到各灰度图像各自对应的已去噪图像;其中,所述指定像素位置的像素差异值小于第二阈值。
60、可选的,所述指定像素位置在所述多个灰度图像中的各像素值均小于第三阈值。
61、可选的,所述装置还包括:
62、第二光条特征提取模块,用于在所述将每一灰度图像中指定像素位置的像素值,替换为所述指定像素位置的像素差异值,或者,替换为小于第一阈值的指定像素值,得到各灰度图像各自对应的已去噪图像之后,在所述多个灰度图像中包含指定对象的情况下,分别对每一已去噪图像进行光条特征提取,得到多个第二光条特征;
63、第二重建模块,用于基于各第二光条特征,进行点云重建,得到所述指定对象的目标三维轮廓。
64、可选的,所述第二重建模块,包括:
65、特征差异值计算子模块,用于针对每一第二光条特征,计算该第二光条特征与预设标准光条特征之间的特征差异值;
66、目标光条特征获取子模块,用于基于各第二光条特征和对应的特征差异值,得到目标光条特征;
67、目标三维轮廓重建子模块,用于基于所述目标光条特征,进行点云重建,得到所述指定对象的目标三维轮廓。
68、可选的,所述目标光条特征获取子模块,具体用于从各第二光条特征中确定特征差异值最小的光条特征,得到目标光条特征;或者,基于各第二光条特征的权重,对各第二光条特征进行特征融合,得到目标光条特征;其中,任一第二光条特征的权重与该第二光条特征的特征差异值呈负相关。
69、可选的,所述第二重建模块,具体用于分别基于每一第二光条特征,进行点云重建,得到所述指定对象的多个初始三维轮廓;对各初始三维轮廓进行融合,得到所述指定对象的目标三维轮廓。
70、可选的,所述第二计算模块,具体用于针对每一像素位置,计算该像素位置在所述多个灰度图像中的各像素值的方差,得到该像素位置的像素差异值;或者,针对每一像素位置,计算该像素位置在每两个灰度图像中的像素值的差值的平均值,得到该像素位置的像素差异值。
71、本技术实施的又一方面,还提供了一种电子设备,包括:
72、存储器,用于存放计算机程序;
73、处理器,用于执行存储器上所存放的程序时,实现上述第一方面或者第二方面任一所述的图像去噪方法。
74、本技术实施的又一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面或者第二方面任一所述的图像去噪方法。
75、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述第一方面或者第二方面任一所述的图像去噪方法。
76、本技术实施例提供的一种图像去噪方法,可以获取在不同曝光时长下采集的图像内容一致的多个灰度图像;计算多个灰度图像中的每一像素位置的像素差异值;其中,任一像素位置的像素差异值表示:该像素位置在多个灰度图像中的各像素值的离散程度;基于得到的像素差异值和多个灰度图像进行图像融合,得到第一融合图像;其中,第一融合图像中指定像素位置的像素值为指定像素位置的像素差异值,或者,第一融合图像中指定像素位置的像素值为小于第一阈值的指定像素值;指定像素位置的像素差异值小于第二阈值;第一融合图像中除指定像素位置以外的其他任一像素位置的像素值为:该像素位置在多个灰度图像中的各像素值的加权和。
77、基于上述处理,由于底噪是相机中的传感器产生的,因此,采集到的图像中底噪所在的像素位置,以及底噪的大小往往只会受到传感器的硬件性能的影响。相应的,在不同曝光时长下采集的多个灰度图像中存在的底噪所在的像素位置,以及底噪的大小往往不会发生变化或者变化较小。
78、且由于多个灰度图像的图像内容一致,因此,针对多个灰度图像中的每一像素位置,若计算得到的该像素位置的像素差异值小于第二阈值,即,该像素位置(即指定像素位置)的像素差异值较小,则表示该像素位置在多个灰度图像中的各像素值的离散程度较小。即,指定像素位置在多个灰度图像中的像素值变化较小,相应的,也就可以确定指定像素位置为底噪所在的像素位置。
79、进而,可以基于计算得到的像素差异值和多个灰度图像进行图像融合,以使融合得到的图像(即第一融合图像)中指定像素位置的像素值为一个较小的值(指定像素位置的像素差异值,或者,小于第一阈值的指定像素值)。如此,也就能够减小第一融合图像中的底噪,提高最终得到的图像的图像质量。
80、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!