基于空、地联合的三维地质精细化建模方法及装置与流程
本发明涉及地质建模的,尤其是涉及一种基于空、地联合的三维地质精细化建模方法及装置。
背景技术:
1、在地质领域,精细的三维地质建模对于资源勘探、环境保护和地质灾害预测具有重要意义。基于空、地联合的三维地质精细化建模方法融合了无人机航拍和手持激光扫描等先进技术,为地质科学提供了更强大的工具。目前,无人机航拍技术的广泛应用为地质调查提供了高分辨率的图像数据,使科学家能够更全面、更详细地了解地表特征。同时,手持激光扫描仪则能够以高精度获取地面点云数据,进一步增强了地质模型的准确性。
2、然而,这些技术在应对一些复杂场景时仍存在一些不足。首先,无人机航拍受到天气、风速等自然条件的限制,可能无法在某些极端环境下完成任务。其次,由于无人机飞行高度有限,可能导致对于高山区域、垂直悬崖等难以覆盖。此外,手持激光扫描仪的扫描范围相对有限,需要在多个位置进行手动操作,增加了数据采集的复杂性。
3、因此,相关技术中通过结合无人机航拍和手持激光扫描的数据,使得能够在更广泛的地理范围内获取更丰富的地质信息,以使得提高数据的精确性和覆盖范围,还通过人工智能算法进行数据处理,加速了地质建模的速度和效率。但无人机航拍和手持激光扫描的数据结合程度不高,无法通过结合无人机航拍和手持激光扫描的数据提高三维地质模型的精细化程度。
技术实现思路
1、为了提高无人机勘测数据和激光扫描数据的结合程度,进而提高三维地质模型的精细化程度,本技术提供一种基于空、地联合的三维地质精细化建模方法及装置。
2、第一方面,本技术的上述发明目的是通过以下技术方案得以实现的:
3、一种基于空、地联合的三维地质精细化建模方法,所述基于空、地联合的三维地质精细化建模方法包括:
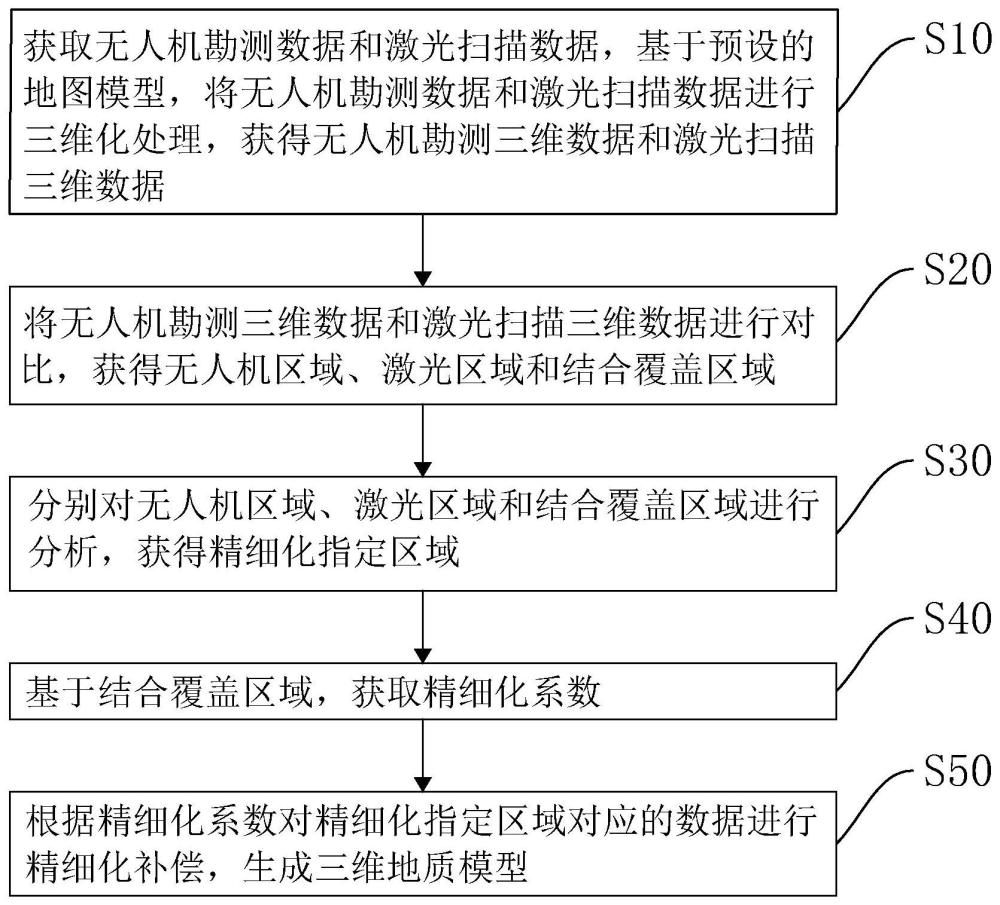
4、获取无人机勘测数据和激光扫描数据,基于预设的地图模型,将所述无人机勘测数据和所述激光扫描数据进行三维化处理,获得无人机勘测三维数据和激光扫描三维数据;
5、将所述无人机勘测三维数据和所述激光扫描三维数据进行对比,获得无人机区域、激光区域和结合覆盖区域;
6、分别对所述无人机区域、所述激光区域和所述结合覆盖区域进行分析,获得精细化指定区域;
7、基于所述结合覆盖区域,获取精细化系数;
8、根据所述精细化系数对所述精细化指定区域对应的数据进行精细化补偿,生成三维地质模型。
9、通过采用上述技术方案,将无人机勘测数据和激光扫描数据进行三维化处理,并将无人机勘测数据和激光扫描数据对应,使得无人机勘测的区域和激光扫描的区域对应在相同的坐标系,便于后续对无人机勘测数据和激光扫描数据的综合分析;而在无人机和激光扫描仪的联合三维建模方法中,大多无人机勘测的区域和激光扫描的区域并不重合,例如,对于无人机难以抵达或工作人员难以使用激光扫描仪进行勘测的区域,无人机勘测的区域和激光扫描的区域并不重合,而部分地质情况复杂的区域,会同时使用无人机和激光扫描仪进行勘测,因此,通过无人机勘测的区域和激光扫描的区域的对比,判断出不同区域的数据是否具有无人机和激光扫描仪同时勘测的情况,以此,对同一区域具有无人机和激光扫描仪同时勘测进行对比分析,能够进一步判断无人机和激光扫描仪的勘测特性,进而判断出目标区域中精细化程度较低的区域,再进行针对性的精细化补偿处理,实现提高无人机勘测数据和激光扫描数据的结合程度,进而提高三维地质模型的精细化程度的效果。
10、本技术在一较佳示例中可以进一步配置为:所述分别对所述无人机区域、所述激光区域和所述结合覆盖区域进行分析,获得精细化指定区域,具体包括:
11、将所述无人机区域、所述激光区域和所述结合覆盖区域对应的数据输入空白机器学习模型,基于所述空白机器学习模型,获得第一精细化指定区域;
12、将所述无人机区域、所述激光区域和所述结合覆盖区域对应的数据输入地质勘查模型,基于所述地质勘查模型,获得第二精细化指定区域;
13、根据所述第一精细化指定区域和所述第二精细化指定区域,获得精细化指定区域。
14、通过采用上述技术方案,空白机器学习模型即是指并未经过训练的机器学习模型,未经过训练的机器学习模型不会受到其他数据或特征的影响,而是仅以当前数据的特性出发进行分析,能够更准确地分析当前数据的不同之处,因此,将无人机区域、激光区域和结合覆盖区域对应的数据输入空白机器学习模型,通过空白机器学习模型的分析,分别判断不同区域对应的勘测数据的细致程度不一样的地方,进而获得需要进行精细化处理的区域;而地质勘查模型是指经过多个不同区域的无人机勘测数据和激光扫描数据的训练的机器学习模型,通过地质勘查模型,判断出表示符合一般逻辑的需要进行精细化处理的第二精细化指定区域,以此结合第一精细化指定区域和第二精细化指定区域,获得更加准确的精细化指定区域,进而使得目标区域的三维地质模型更加精细。
15、本技术在一较佳示例中可以进一步配置为:所述根据所述第一精细化指定区域和所述第二精细化指定区域,获得精细化指定区域,具体包括:
16、将所述第一精细化指定区域和所述第二精细化指定区域对应的数据进行对比,获得区域对比结果;
17、根据所述区域对比结果,获得精细化指定区域。
18、通过采用上述技术方案,第一精细化指定区域是通过空白机器学习模型获取的,第二精细化指定区域是通过地质勘查模型获取的,因此,第一精细化指定区域和第二精细化指定区域不同,但第一精细化指定区域和第二精细化指定区域均是指需要进行精细化的区域,因此,将第一精细化指定区域和第二精细化指定区域进行对比并合并,将合并后的区域作为精细化指定区域,以此,增大需要精细化处理的区域并保障选择精细化处理的区域的准确性。
19、本技术在一较佳示例中可以进一步配置为:所述分别对所述无人机区域、所述激光区域和所述结合覆盖区域进行分析,获得精细化指定区域,具体包括:
20、将所述无人机区域、所述激光区域和所述结合覆盖区域对应的数据均输入专家经验模型、地质学习模型和边缘模型,获得专家经验精细化指定区域、地质学习精细化指定区域和边缘精细化指定区域;
21、基于预设的可信度排序对所述专家经验精细化指定区域、所述地质学习精细化指定区域和所述边缘精细化指定区域进行排序,根据排序结果,获得精细化指定区域。
22、通过采用上述技术方案,专家经验模型是指专家对无人机和激光扫描仪的勘测数据进行分析,判断无人机和激光扫描仪在勘测时,容易发生数据精细化程度不足的区域,地质学习模型则是通过结合目标区域的地质特性判断的容易导致无人机和激光扫描仪的勘测数据精细化程度不足的区域,边缘模型则是对无人机和激光扫描仪的历史勘测数据进行分析,判断勘测数据精细化程度不足的区域出现时的地质特征,进而判断出当前目标区域的精细化程度不足的区域,预设的可信度排序是指用于对不同区域选择不同模型的结果的顺序信息,例如,无人机区域对应的可信度排序表示在专家经验精细化指定区域、地质学习精细化指定区域和边缘精细化指定区域中,边缘精细化指定区域的可信度最高,因此,将无人机区域输入边缘模型获得的边缘精细化指定区域作为精细化指定区域,以此进一步保障选择精细化处理的区域的准确性。
23、本技术在一较佳示例中可以进一步配置为:所述基于所述结合覆盖区域,获取精细化系数,具体包括:
24、将所述结合覆盖区域对应的数据输入地质对比模型,获得地质对比结果;
25、根据所述地质对比结果,获得精细化系数。
26、通过采用上述技术方案,结合覆盖区域是指同时使用无人机和激光扫描仪进行勘测的区域,因此,通过对该结合覆盖区域对应的数据输入地质对比模型进行分析,判断出同一位置处无人机勘测数据和激光扫描数据的差异,再根据该差异判断推测出无人机勘测数据和激光扫描数据的精细化程度差异,进而生成需要对该结合覆盖区域的精细化系数,即将该结合覆盖区域的无人机勘测数据和激光扫描数据进行细化的系数,通过该精细化系数实现对当前目标区域的无人机勘测数据和激光扫描数据的细化,进而使得目标区域的三维地质模型更加精细。
27、本技术在一较佳示例中可以进一步配置为:所述根据所述精细化系数对所述精细化指定区域对应的数据进行精细化补偿,生成三维地质模型,具体包括:
28、根据所述精细化系数以及预设的补偿系数,获得精细化补偿系数;
29、根据所述精细化补偿系数对所述精细化指定区域对应的数据进行精细化补偿,生成三维地质模型。
30、通过采用上述技术方案,预设的补偿系数是指对目标区域整体的无人机勘测数据和激光扫描数据进行精细化补偿的系数,通过结合精细化系数以及预设的补偿系数,进一步提高目标区域整体的无人机勘测数据和激光扫描数据的精细化程度,进而使得生成的三维地质模型更加精细。
31、第二方面,本技术的上述发明目的是通过以下技术方案得以实现的:
32、一种基于空、地联合的三维地质精细化建模装置,所述基于空、地联合的三维地质精细化建模装置包括:
33、数据三维化模块,用于获取无人机勘测数据和激光扫描数据,基于预设的地图模型,将所述无人机勘测数据和所述激光扫描数据进行三维化处理,获得无人机勘测三维数据和激光扫描三维数据;
34、区域划分模块,用于将所述无人机勘测三维数据和所述激光扫描三维数据进行对比,获得无人机区域、激光区域和结合覆盖区域;
35、区域数据分析模块,用于分别对所述无人机区域、所述激光区域和所述结合覆盖区域进行分析,获得精细化指定区域;
36、精细化系数获取模块,用于基于所述结合覆盖区域,获取精细化系数;
37、三维模型生成模块,用于根据所述精细化系数对所述精细化指定区域对应的数据进行精细化补偿,生成三维地质模型。
38、可选的,所述区域数据分析模块包括:
39、第一分析子模块,用于将所述无人机区域、所述激光区域和所述结合覆盖区域对应的数据输入空白机器学习模型,基于所述空白机器学习模型,获得第一精细化指定区域;
40、第二分析子模块,用于将所述无人机区域、所述激光区域和所述结合覆盖区域对应的数据输入地质勘查模型,基于所述地质勘查模型,获得第二精细化指定区域;
41、结果综合子模块,用于根据所述第一精细化指定区域和所述第二精细化指定区域,获得精细化指定区域。
42、第三方面,本技术的上述发明目的是通过以下技术方案得以实现的:
43、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述基于空、地联合的三维地质精细化建模方法的步骤。
44、第四方面,本技术的上述发明目的是通过以下技术方案得以实现的:
45、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述基于空、地联合的三维地质精细化建模方法的步骤。
46、综上所述,本技术包括以下至少一种有益技术效果:
47、1、将无人机勘测数据和激光扫描数据进行三维化处理,并将无人机勘测数据和激光扫描数据对应,使得无人机勘测的区域和激光扫描的区域对应在相同的坐标系,便于后续对无人机勘测数据和激光扫描数据的综合分析;而在无人机和激光扫描仪的联合三维建模方法中,大多无人机勘测的区域和激光扫描的区域并不重合,例如,对于无人机难以抵达或工作人员难以使用激光扫描仪进行勘测的区域,无人机勘测的区域和激光扫描的区域并不重合,而部分地质情况复杂的区域,会同时使用无人机和激光扫描仪进行勘测,因此,通过无人机勘测的区域和激光扫描的区域的对比,判断出不同区域的数据是否具有无人机和激光扫描仪同时勘测的情况,以此,对同一区域具有无人机和激光扫描仪同时勘测进行对比分析,能够进一步判断无人机和激光扫描仪的勘测特性,进而判断出目标区域中精细化程度较低的区域,再进行针对性的精细化补偿处理,实现提高无人机勘测数据和激光扫描数据的结合程度,进而提高三维地质模型的精细化程度的效果;
48、2、空白机器学习模型即是指并未经过训练的机器学习模型,未经过训练的机器学习模型不会受到其他数据或特征的影响,而是仅以当前数据的特性出发进行分析,能够更准确地分析当前数据的不同之处,因此,将无人机区域、激光区域和结合覆盖区域对应的数据输入空白机器学习模型,通过空白机器学习模型的分析,分别判断不同区域对应的勘测数据的细致程度不一样的地方,进而获得需要进行精细化处理的区域;而地质勘查模型是指经过多个不同区域的无人机勘测数据和激光扫描数据的训练的机器学习模型,通过地质勘查模型,判断出表示符合一般逻辑的需要进行精细化处理的第二精细化指定区域,以此结合第一精细化指定区域和第二精细化指定区域,获得更加准确的精细化指定区域,进而使得目标区域的三维地质模型更加精细;
49、3、第一精细化指定区域是通过空白机器学习模型获取的,第二精细化指定区域是通过地质勘查模型获取的,因此,第一精细化指定区域和第二精细化指定区域不同,但第一精细化指定区域和第二精细化指定区域均是指需要进行精细化的区域,因此,将第一精细化指定区域和第二精细化指定区域进行对比并合并,将合并后的区域作为精细化指定区域,以此,增大需要精细化处理的区域并保障选择精细化处理的区域的准确性。
- 还没有人留言评论。精彩留言会获得点赞!