一种基于天车的晶圆传送自动化调度方法及系统与流程
本发明涉及晶圆传送,更具体地说,本发明涉及一种基于天车的晶圆传送自动化调度方法及系统。
背景技术:
1、晶圆运输时所使用的天车是专门设计用于半导体晶圆搬运和运输的设备,在半导体工业中,晶圆作为制造集成电路的基础材料,其运输过程需要极度谨慎和精确,因此,天车被设计成高精度、高可靠性的运输设备,以满足半导体制造工艺的严格需求;
2、天车在天车运输路线上进行移动,天车运输路线是指天车在半导体制造厂内部洁净室环境中移动晶圆的路径,天车运输路线的设计是半导体制造过程中非常重要的一环,它直接影响到晶圆的安全性、洁净度以及生产效率,由于天车运输路线错综复杂,天车运输路线通常会产生交汇点,为了避免天车在交汇点发生碰撞,现有技术中,通常会在天车上安装有监测装置,或者控制其中一辆天车停止移动,让另一辆天车先行通过,会存在以下问题;
3、例如,公开号为cn114890075a的中国专利公开了一种空中运输小车的行走状态监测装置和方法,该专利对空中运输小车的运行状态进行自动监测,避免了因运行轨道异常而影响晶圆盒运输安全性的问题,但是天车运输晶圆的过程中需要稳定性,而现有技术中,控制其中一辆天车停止移动,无疑会造成天车在减速的过程出现强烈的不稳定性,容易造成晶圆的损伤,进一步地,天车具有两种状态,载荷状态和空载状态,现有技术中,极少存在能够通过天车状态对天车实现精确的控制。
4、鉴于此,本发明提出一种基于天车的晶圆传送自动化调度方法及系统以解决上述问题。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种基于天车的晶圆传送自动化调度方法及系统。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于天车的晶圆传送自动化调度方法,包括:
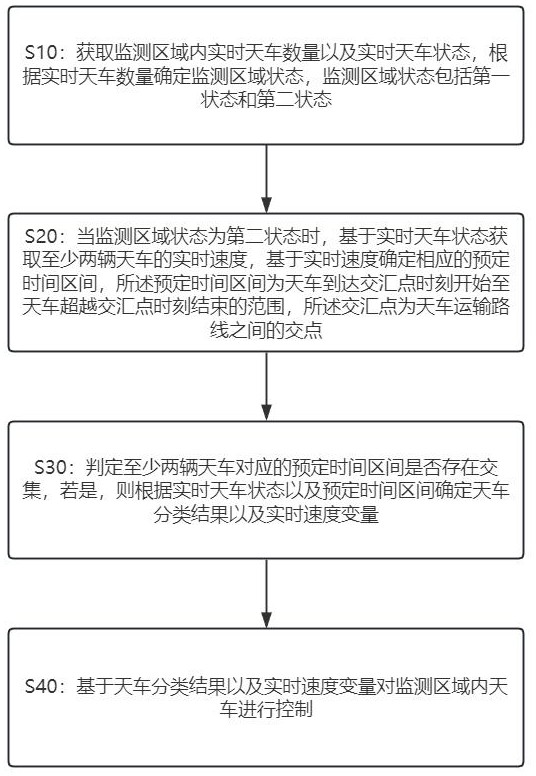
4、s10:获取监测区域内实时天车数量以及实时天车状态,根据实时天车数量确定监测区域状态,监测区域状态包括第一状态和第二状态;
5、s20:当监测区域状态为第二状态时,基于实时天车状态获取至少两辆天车的标准速度,基于标准速度确定相应的预定时间区间,所述预定时间区间为天车到达交汇点时刻开始至天车超越交汇点时刻结束的范围,所述交汇点为天车运输路线之间的交点;
6、s30:判定至少两辆天车对应的预定时间区间是否存在交集,若是,则根据实时天车状态以及预定时间区间确定天车分类结果以及标准速度变量;
7、s40:基于天车分类结果以及标准速度变量对监测区域内天车进行控制。
8、进一步地,实时天车状态包括载荷状态和空载状态,根据实时天车数量确定监测区域状态的方法包括:
9、当实时天车数量小于2时,则监测区域状态为第一状态;
10、当实时天车数量大于或等于2时,则监测区域状态为第二状态。
11、进一步地,标准速度包括第一速度和第二速度,第一速度与载荷状态相对应,而第二速度与空载状态相对应,基于实时天车状态获取至少两辆天车的标准速度的方法包括:
12、将实时天车状态输入至预构建的速度分类模型中,获得速度分类模型输出的标准速度。
13、进一步地,速度分类模型的构建方法包括:
14、获取i组数据,i为大于1的正整数,数据包括历史天车状态和历史速度,将历史天车状态和历史速度作为样本集,将样本集划分为训练集和测试集,构建分类器,将训练集中的历史天车状态作为输入数据,将训练集中的历史速度作为输出数据,对分类器进行训练,得到初始分类器,利用测试集对初始分类器进行测试,输出满足预设准确度的分类器作为速度分类模型。
15、进一步地,基于标准速度确定相应的预定时间区间的方法包括:
16、获取第一时刻、当前时刻、第一行驶长度和第二行驶长度,计算当前时刻与第一时刻的时间差值,基于标准速度以及时间差值计算得到实时行驶长度,根据实时行驶长度以及第二行驶长度判断是否生成预定时间区间,若是,则计算第一行驶长度与实时行驶长度之间的第一长度差值,计算第二行驶长度与实时行驶长度之间的第二长度差值,基于标准速度、第一长度差值和第二长度差值确定预定时间区间,所述第一时刻为天车进入监测区域时的时刻,所述第一行驶长度为天车进入监测区域到天车进入交汇点所行驶的距离,所述第二行驶长度为天车进入监测区域到天车完全穿过交汇点所行驶的距离。
17、进一步地,根据实时行驶长度以及第二行驶长度判断是否生成预定时间区间的方法包括:
18、当实时行驶长度小于第二行驶长度时,则生成预定时间区间;
19、当实时行驶长度大于或等于第二行驶长度时,则不生成预定时间区间。
20、进一步地,基于标准速度、第一长度差值和第二长度差值确定预定时间区间的方法包括:
21、当第一长度差值不大于0时,则直接获取第一预定时刻,将第二长度差值除以标准速度得到第二时间区间,将第二时间区间的终止点与当前时刻之和作为第二预定时刻,将第一预定时刻作为预定时间区间的起始点,将第二预定时刻作为预定时间区间的终止点以生成预定时间区间;
22、当第一长度差值大于0时,将第一长度差值除以标准速度得到第一时间区间,将第二长度差值除以标准速度得到第二时间区间,将第一时间区间的终止点与当前时刻之和作为第一预定时刻,将第二时间区间的终止点与当前时刻之和作为第二预定时刻,将第一预定时刻作为预定时间区间的起始点,将第二预定时刻作为预定时间区间的终止点以生成预定时间区间。
23、进一步地,天车分类结果包括加速天车和减速天车,根据实时天车状态以及预定时间区间确定天车分类结果的方法包括:
24、计算第一天车所对应的预定时间区间的第一预定时刻与第二天车所对应的预定时间区间的第一预定时刻之间的差值绝对值,所述第一天车对应的第一预定时刻小于第二天车对应的第一预定时刻;
25、当差值绝对值大于预设差值阈值时,则第一天车为加速天车,第二天车为减速天车;
26、当差值绝对值小于或等于预设差值阈值时,则实时天车状态为空载状态的天车作为加速天车,将实时天车状态为载荷状态的天车作为减速天车,当第一天车和第二天车均为载荷状态或均为空载状态时,则将任意一辆天车作为加速天车,将另一辆天车作为减速天车。
27、进一步地,标准速度变量包括第一速度变量和第二速度变量,根据实时天车状态以及预定时间区间确定速度变量的方法包括:
28、基于第一天车对应的第二预定时刻和第二天车对应的第一预定时刻确定中间时刻,基于第一天车对应的第二预定时刻与中间时刻确定第一时间调整量,基于第二天车对应的第一预定时刻与中间时刻确定第二时间调整量,将第一天车对应的实时天车状态以及第一时间调整量输入到速度变量模型中,获得速度变量模型输出的第一速度变量,将第二天车对应的实时天车状态以及第二时间调整量输入到速度变量模型中,获得速度变量模型输出的第二速度变量。
29、进一步地,速度变量模型的构建方法包括:
30、获取样本数据集,所述样本数据集中包括历史天车状态、历史时间调整量和历史速度变量,将样本数据集划分为样本训练集和样本测试集,构建回归网络,以样本训练集中的历史天车状态和历史时间调整量作为回归网络的输入数据,以样本训练集中的历史速度变量作为回归网络的输出数据,对回归网络进行训练,得到用于预测标准速度变量的初始回归网络,利用样本测试集对初始回归网络进行测试,输出满足小于预设误差值的回归网络作为速度变量模型。
31、一种基于天车的晶圆传送自动化调度系统,其用于实现上述一种基于天车的晶圆传送自动化调度方法,包括:
32、区域状态确定模块:用于获取监测区域内实时天车数量以及实时天车状态,根据实时天车数量确定监测区域状态,监测区域状态包括第一状态和第二状态;
33、时间区间生成模块:用于当监测区域状态为第二状态时,基于实时天车状态获取至少两辆天车的标准速度,基于标准速度确定相应的预定时间区间,所述预定时间区间为天车到达交汇点时刻开始至天车超越交汇点时刻结束的范围,所述交汇点为天车运输路线之间的交点;
34、判定模块:用于判定至少两辆天车对应的预定时间区间是否存在交集,若是,则根据实时天车状态以及预定时间区间确定天车分类结果以及标准速度变量;
35、控制模块:用于基于天车分类结果以及标准速度变量对监测区域内天车进行控制。
36、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被执行时实现上述一种基于天车的晶圆传送自动化调度方法。
37、相比于现有技术,本发明的有益效果为:
38、本发明中,先是确定了监测区域状态,根据监测区域状态判断是否存在天车相撞的可能性,接着生成预定时间区间,根据两辆天车所对应的预定时间区间确定两辆天车是否会发生相撞,当确定两辆天车会发生相撞时,则根据实时天车状态以及预定时间区间确定天车分类结果以及标准速度变量,最后基于天车分类结果以及标准速度变量对监测区域内天车进行控制,这样既避免了控制其中一辆天车停止移动,造成天车在减速的过程出现强烈的不稳定性,出现晶圆严重损伤的现象,又能根据实时天车状态为载荷状态或者空载状态,得出精确的天车分类结果,实现了通过天车状态对天车进行精确的控制。
- 还没有人留言评论。精彩留言会获得点赞!