多飞行器作业规划数据处理方法、装置、介质及电子设备与流程
本技术涉及计算机及数据处理,具体而言,涉及一种多飞行器作业规划数据处理方法、装置、介质及电子设备。
背景技术:
1、飞行器在空间移动方面具有的灵活性和高效性,使得其被越来越广泛的应用在社会生产活动中。比如,在救灾(例如地震,洪涝等自然灾害)场景中,可能存在多个灾区(即任务执行位置),由于不同灾区的情况不一样,使得不同灾区适合的飞行器型号也不一样。例如有一些飞行器(比如货物运输机)主要对灾区进行物资投送,有一些飞行器(比如直升机)主要用于救助伤员,还有一些飞行器(比如无人机)可以用于对灾区的灾情监测。
2、在类似救灾场景的一些多飞行器作业场景中,实际的多飞行器作业任务规划面临着极为复杂和多变的资源保障和任务分配难题,多样化的飞行任务需求和不断更新升级的数字化平台要求涵盖各种不同类型的飞行器,分别执行不同要求的任务,同时,任务需求也呈现多样性和特殊性,不仅需要面对空间位置变化、任务持续时长和飞行器同时在位数量要求,还要实现资源的最大化利用。基于此,如何提高多飞行器作业规划数据处理的准确性是亟待解决的技术问题。
技术实现思路
1、本技术的实施例提供了一种多飞行器作业规划数据处理方法、装置、计算机程序产品或计算机程序、计算机可读介质及电子设备,进而至少在一定程度上可以提高多飞行器作业规划数据处理的准确性。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
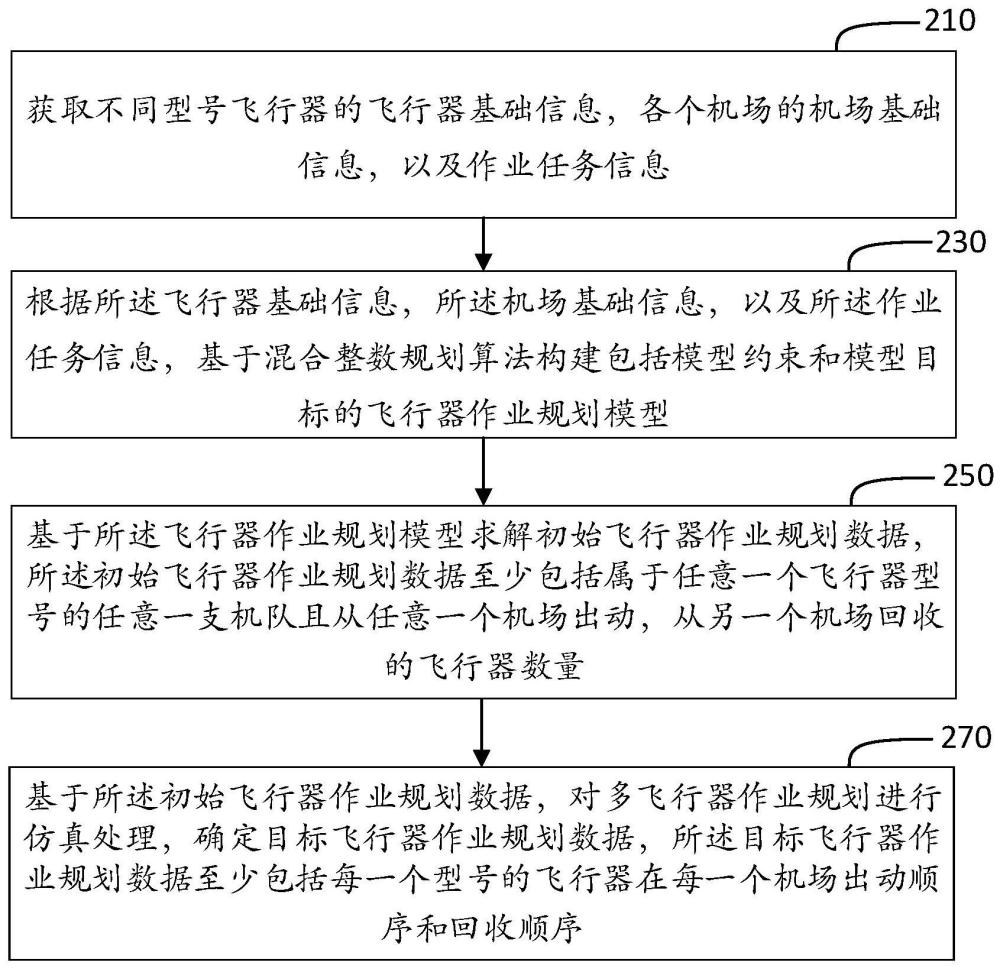
3、根据本技术实施例的一个方面,提供了一种多飞行器作业规划数据处理方法,所述方法包括:获取不同型号飞行器的飞行器基础信息,各个机场的机场基础信息,以及作业任务信息;根据所述飞行器基础信息,所述机场基础信息,以及所述作业任务信息,基于混合整数规划算法构建包括模型约束和模型目标的飞行器作业规划模型;基于所述飞行器作业规划模型求解初始飞行器作业规划数据,所述初始飞行器作业规划数据至少包括属于任意一个飞行器型号的任意一支机队且从任意一个机场出动,从另一个机场回收的飞行器数量;基于所述初始飞行器作业规划数据,对多飞行器作业规划进行仿真处理,确定目标飞行器作业规划数据,所述目标飞行器作业规划数据至少包括每一个型号的飞行器在每一个机场出动顺序和回收顺序。
4、在本技术的一些实施例中,基于前述方案,所述飞行器作业规划模型包括如下模型约束:
5、
6、其中,xij表示从机场j出动的型号为i的飞行器数量,为整数决策变量;yij表示从机场j回收的型号为i的飞行器数量,为整数决策变量;zijj′表示从机场j出动,机场j′回收的型号为i的飞行器数量,为整数决策变量;yij′表示从机场j′回收的型号为i的飞行器数量,为整数决策变量;n表示机场集合;m表示飞行器型号集合,每种型号的飞行器对应一个固定的任务执行位置。
7、在本技术的一些实施例中,基于前述方案,所述飞行器作业规划模型包括如下模型约束:
8、
9、其中,tij表示型号i的飞行器在对应任务执行位置与机场j之间所需的飞行时长,为定量;twijj′表示从机场j出动,机场j′回收的型号为i的飞行器在任务执行位置执行任务的时长,为连续决策变量;tij′表示型号i的飞行器在对应任务执行位置与机场j′之间所需的飞行时长,为定量;tmi表示型号i的飞行器单次可飞行最大时长,为定量;n表示机场集合;m表示飞行器型号集合,每种型号的飞行器对应一个固定的任务执行位置。
10、在本技术的一些实施例中,基于前述方案,所述飞行器作业规划模型包括如下模型约束:
11、
12、其中,αi表示型号i的飞行器在单次执行任务时消耗资源α的数量,为定量;xij表示从机场j出动的型号为i的飞行器数量,为整数决策变量;cmi表示型号i的飞行器在任务执行位置需要消耗α资源的最小数量,为定量;αmj表示机场j拥有资源α的最大数量,为定量;βi表示型号i的飞行器在单次执行任务时消耗资源β的数量,为定量;βmj表示机场j拥有资源β的最大数量,为定量;fi表示型号i的飞行器在单位时间内飞行的耗油量,为定量;tij表示型号i的飞行器在对应任务执行位置与机场j之间所需的飞行时长,为定量;twijj′表示从机场j出动,机场j′回收的型号为i的飞行器在任务执行位置执行任务的时长,为连续决策变量;tij′表示型号i的飞行器在对应任务执行位置与机场j′之间所需的飞行时长,为定量;zijj′表示从机场j出动,机场j′回收的型号为i的飞行器数量,为整数决策变量;fmj表示机场j的最大储油量,为定量;n表示机场集合;m表示飞行器型号集合,每种型号的飞行器对应一个固定的任务执行位置。
13、在本技术的一些实施例中,基于前述方案,所述飞行器作业规划模型包括如下模型约束:
14、
15、其中,wikjj′表示属于飞行器型号i的第k支机队且从机场j出动,机场j′回收的飞行器数量,为整数决策变量,k∈{1,2,…,cni};zijj′表示从机场j出动,机场j′回收的型号为i的飞行器数量,为整数决策变量;cni表示型号i的飞行器在任务执行位置保持同时运转的数量,为定量;twijj′表示从机场j出动,机场j′回收的型号为i的飞行器在任务执行位置执行任务的时长,为连续决策变量;cdi表示型号i的飞行器在任务执行位置保持连续运转的时长,单位h,为定量;n表示机场集合;m表示飞行器型号集合,每种型号的飞行器对应一个固定的任务执行位置。
16、在本技术的一些实施例中,基于前述方案,所述飞行器作业规划模型包括如下模型约束:
17、
18、其中,xij表示从机场j出动的型号为i的飞行器数量,为整数决策变量;cpj表示机场j的飞行器容量上限,为定量;yij表示从机场j回收的型号为i的飞行器数量,为整数决策变量;n表示机场集合;m表示飞行器型号集合,每种型号的飞行器对应一个固定的任务执行位置。
19、在本技术的一些实施例中,基于前述方案,所述飞行器作业规划模型包括如下模型目标:
20、
21、其中,αi表示型号i的飞行器在单次执行任务时消耗资源α的数量,为定量;xij表示从机场j出动的型号为i的飞行器数量,为整数决策变量;βi表示型号i的飞行器在单次执行任务时消耗资源β的数量,为定量;fi表示型号i的飞行器在单位时间内飞行的耗油量,为定量;tij表示型号i的飞行器在对应任务执行位置与机场j之间所需的飞行时长,为定量;yij表示从机场j回收的型号为i的飞行器数量,为整数决策变量;twijj′表示从机场j出动,机场j′回收的型号为i的飞行器在任务执行位置执行任务的时长,为连续决策变量;zijj′表示从机场j出动,机场j′回收的型号为i的飞行器数量,为整数决策变量;w1表示消耗资源α的数量的惩罚因子;w2表示消耗资源β的数量的惩罚因子;w3表示耗油量的惩罚因子;n表示机场集合;m表示飞行器型号集合,每种型号的飞行器对应一个固定的任务执行位置。
22、根据本技术实施例的一个方面,提供了一种多飞行器作业规划数据处理装置,所述装置包括:获取单元,用于获取不同型号飞行器的飞行器基础信息,各个机场的机场基础信息,以及作业任务信息;构建单元,用于根据所述飞行器基础信息,所述机场基础信息,以及所述作业任务信息,基于混合整数规划算法构建包括模型约束和模型目标的飞行器作业规划模型;求解单元,用于基于所述飞行器作业规划模型求解初始飞行器作业规划数据,所述初始飞行器作业规划数据至少包括属于任意一个飞行器型号的任意一支机队且从任意一个机场出动,从另一个机场回收的飞行器数量;仿真单元,用于基于所述初始飞行器作业规划数据,对多飞行器作业规划进行仿真处理,确定目标飞行器作业规划数据,所述目标飞行器作业规划数据至少包括每一个型号的飞行器在每一个机场出动顺序和回收顺序。
23、根据本技术实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述实施例中所述的方法。
24、根据本技术实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的方法。
25、根据本技术实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的方法。
26、基于本技术提出的技术方案,首先根据不同型号飞行器的飞行器基础信息,各个机场的机场基础信息,以及作业任务信息,基于混合整数规划算法构建包括模型约束和模型目标的飞行器作业规划模型,可以综合考虑影响多飞行器作业规划的各种复杂因素,以及各种因素之间的复杂关系,使得基于飞行器作业规划模型可以准确求解各个飞行器型号从每个机场出动之后从另一个机场回收的飞行器数量,并在此基础上,通过对多飞行器作业规划进行仿真处理,确定每一个型号的飞行器在每一个机场出动顺序和回收顺序,从而可以提高多飞行器作业规划数据处理的准确性,增加多飞行器作业规划的合理性。
27、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!