任意株高三维重建方法、系统及装置与流程
本发明涉及图像处理,尤其涉及一种任意株高三维重建方法、系统及装置。
背景技术:
1、随着农作物种类繁多,各种测量对于农作物来讲是很有必要的,而植株三维表型重建对植株育种选型和田间作物生长管理具有非常重要的作用。植株三维重建结果能够直接提供高度、宽度、叶片倾角、叶面积、冠层体积等三维表型信息,这些信息不但能够反映作物内在的基因特性,也能够间接反映出生长环境及田间管理对植株的影响。
2、现有技术中,植株三维重建一般采用基于sfm(structure from motion)的方法,利用相机采集植株不同视角的彩色图像,通过提取图像特征点以及特征匹配,结合捆绑调整优化,获得植株的三维空间结构数据。
3、作物生长阶段不同则植株整体高度也不同,由于此种方法需要使用相机对图像进行采集,但相机视野范围会受到现有装置的限制,所以并不能兼顾所有高度的植株,不能够根据植株大小灵活调节,自动生成不同高度植株的三维点云。另外,有限的相机采集视角仅适用于形态结构较为简单的植株,对于结构复杂、枝叶繁密的大型植株,则因难以捕获全面、丰富的信息而导致三维点云重建细节缺失。因此,通过传统方法实现株高三维重建,势必会用到更多的相机,成本高,需要人工调节。
技术实现思路
1、本发明针对现有技术中的缺点,提供了一种任意株高三维重建方法、系统及装置。
2、为了解决上述问题,本发明通过下述技术方案得以解决:
3、一种任意株高三维重建方法,包括以下步骤:
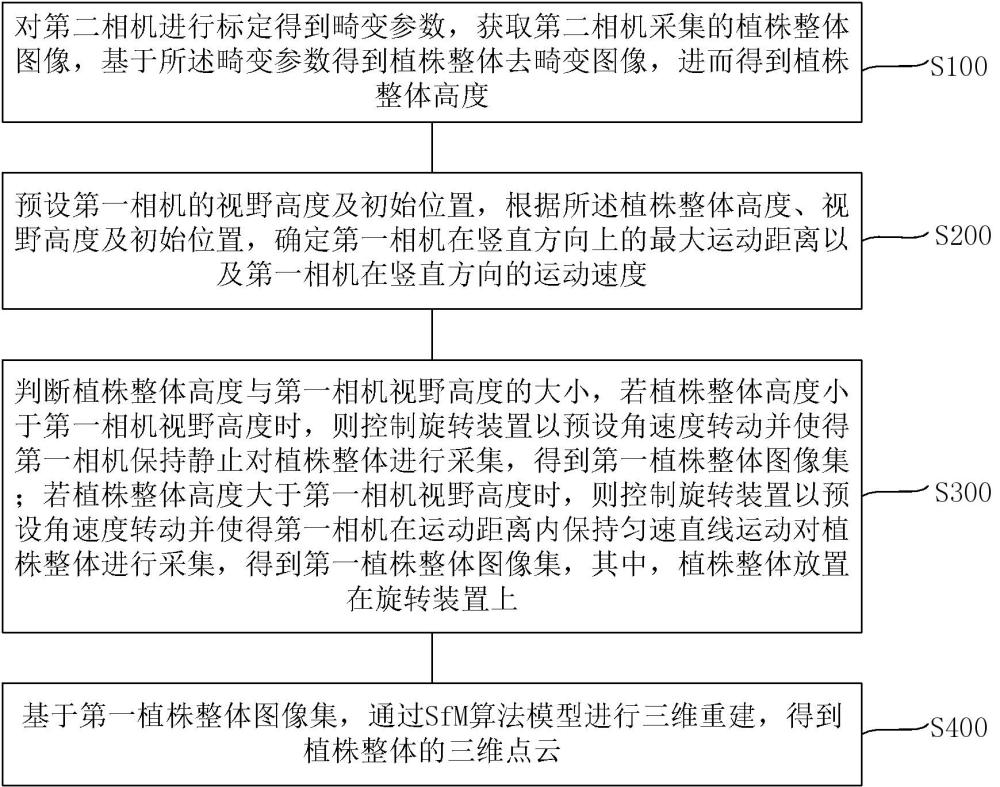
4、对第二相机进行标定得到畸变参数,获取第二相机采集的植株整体图像,基于所述畸变参数得到植株整体去畸变图像,进而得到植株整体高度;
5、预设第一相机的视野高度及初始位置,根据所述植株整体高度、视野高度及初始位置,确定第一相机在竖直方向上的最大运动距离以及第一相机在竖直方向的运动速度;
6、判断植株整体高度与第一相机视野高度的大小,若植株整体高度小于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机保持静止对植株整体进行采集,得到第一植株整体图像集;若植株整体高度大于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机在运动距离内保持匀速直线运动对植株整体进行采集,得到第一植株整体图像集,其中,植株整体放置在旋转装置上;
7、基于第一植株整体图像集,通过sfm算法模型进行三维重建,得到植株整体的三维点云。
8、作为一种可实施方式,所述第一相机在竖直方向上的最大运动距离=植株整体高度-视野高度。
9、作为一种可实施方式,确定第一相机在竖直方向的运动速度,包括以下步骤:
10、获取基于旋转装置旋转一周后第一相机从初始位置到最大运动距离位置的扫描区域并展开得到最大平铺面,所述最大平铺面为平行四边形,则第一相机视野范围从a点运动到点以及从b点运动到点;
11、控制第一相机的视野范围覆盖整个平铺面,则所述第一相机在竖直方向的运动距离在a和之间的垂直方向距离范围内,则有;
12、进而第一相机在竖直方向的运动速度,表示如下:
13、
14、其中,表示第一相机在竖直方向的运动速度,表示第一相机的视野高度,表示旋转装置的预设角速度。
15、作为一种可实施方式,所述则控制旋转装置以预设角速度转动并使得第一相机保持静止对植株整体进行采集,得到第一植株整体图像集,包括以下步骤:
16、控制旋转装置以预设角速度进行旋转,使得第一相机保持静止且控制在最大运动距离内;
17、对旋转装置上的植株整体进行连续采集,直至旋转装置旋转一周则停止采集,得到第一植株整体图片并形成第一植株整体图像集。
18、作为一种可实施方式,所述若植株整体高度大于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机在运动距离内保持匀速直线运动对植株整体进行采集,得到第一植株整体图像集,包括以下步骤:
19、使得第一相机位于初始位置并保持静止,控制旋转装置以预设角速度进行旋转,进而对旋转装置上的植株整体进行连续采集;
20、直至旋转装置旋转一周后使得第一相机保持匀速直线运动直至达到最大运动距离;
21、直至旋转装置旋转一周后使得第一相机保持匀速直线运动进行反向运动直至回到初始位置,则停止采集,得到第一植株整体图片并形成第一植株整体图像集。
22、一种任意株高三维重建系统,包括标定计算模块、预设确定模块、判断选择模块及点云重建模块;
23、所述标定计算模块,用于对第二相机进行标定得到畸变参数,获取第二相机采集的植株整体图像,基于所述畸变参数得到植株整体去畸变图像,进而得到植株整体高度;
24、所述预设确定模块,预设第一相机的视野高度及初始位置,根据所述植株整体高度、视野高度及初始位置,确定第一相机在竖直方向上的最大运动距离以及第一相机在竖直方向的运动速度;
25、所述判断选择模块,用于判断植株整体高度与第一相机视野高度的大小,若植株整体高度小于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机保持静止对植株整体进行采集,得到第一植株整体图像集;若植株整体高度大于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机在运动距离内保持匀速直线运动对植株整体进行采集,得到第一植株整体图像集,其中,植株整体放置在旋转装置上;
26、所述点云重建模块,基于第一植株整体图像集,通过sfm算法模型进行三维重建,得到植株整体的三维点云。
27、作为一种可实施方式,所述预设确定模块,被设置为:
28、所述第一相机在竖直方向上的最大运动距离=植株整体高度-视野高度。
29、作为一种可实施方式,所述预设确定模块,被设置为:
30、获取基于旋转装置旋转一周后第一相机从初始位置到最大运动距离位置的扫描区域并展开得到最大平铺面,所述最大平铺面为平行四边形,则第一相机视野范围从a点运动到点以及从b点运动到点;
31、控制第一相机的视野范围覆盖整个平铺面,则所述第一相机在竖直方向的运动距离在a和之间的垂直方向距离范围内,则有;
32、进而第一相机在竖直方向的运动速度,表示如下:
33、
34、其中,表示第一相机在竖直方向的运动速度,表示第一相机的视野高度,表示旋转装置的预设角速度。
35、作为一种可实施方式,所述判断选择模块,被设置为:
36、控制旋转装置以预设角速度进行旋转,使得第一相机保持静止且控制在最大运动距离内;
37、对旋转装置上的植株整体进行连续采集,直至旋转装置旋转一周则停止采集,得到第一植株整体图片并形成第一植株整体图像集,或,
38、使得第一相机位于初始位置并保持静止,控制旋转装置以预设角速度进行旋转,进而对旋转装置上的植株整体进行连续采集;
39、直至旋转装置旋转一周后使得第一相机保持匀速直线运动直至达到最大运动距离;
40、直至旋转装置旋转一周后使得第一相机保持匀速直线运动进行反向运动直至回到初始位置,则停止采集,得到第一植株整体图片并形成第一植株整体图像集。
41、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如下所述的方法:
42、对第二相机进行标定得到畸变参数,获取第二相机采集的植株整体图像,基于所述畸变参数得到植株整体去畸变图像,进而得到植株整体高度;
43、预设第一相机的视野高度及初始位置,根据所述植株整体高度、视野高度及初始位置,确定第一相机在竖直方向上的最大运动距离以及第一相机在竖直方向的运动速度;
44、判断植株整体高度与第一相机视野高度的大小,若植株整体高度小于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机保持静止对植株整体进行采集,得到第一植株整体图像集;若植株整体高度大于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机在运动距离内保持匀速直线运动对植株整体进行采集,得到第一植株整体图像集,其中,植株整体放置在旋转装置上;
45、基于第一植株整体图像集,通过sfm算法模型进行三维重建,得到植株整体的三维点云。
46、一种任意株高三维重建方法装置,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如下所述的方法:
47、对第二相机进行标定得到畸变参数,获取第二相机采集的植株整体图像,基于所述畸变参数得到植株整体去畸变图像,进而得到植株整体高度;
48、预设第一相机的视野高度及初始位置,根据所述植株整体高度、视野高度及初始位置,确定第一相机在竖直方向上的最大运动距离以及第一相机在竖直方向的运动速度;
49、判断植株整体高度与第一相机视野高度的大小,若植株整体高度小于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机保持静止对植株整体进行采集,得到第一植株整体图像集;若植株整体高度大于第一相机视野高度时,则控制旋转装置以预设角速度转动并使得第一相机在运动距离内保持匀速直线运动对植株整体进行采集,得到第一植株整体图像集,其中,植株整体放置在旋转装置上;
50、基于第一植株整体图像集,通过sfm算法模型进行三维重建,得到植株整体的三维点云。
51、本发明由于采用了以上的技术方案,具有显著的技术效果:
52、本发明通过两个相机,能够实现对任意高度植株的三维自动成像和采集,成本低,速度快,操作简单,易于使用;另外,不要求相机的为超高清相机等,只要能保证一个相机可以为畸变相机,另一个相机为广角相机即可实现本发明的发明目的。
- 还没有人留言评论。精彩留言会获得点赞!