一种三维模型辅助电磁光融合成像金属结构检测方法与流程
本发明涉及图像数据处理,尤其是涉及一种三维模型辅助电磁光融合成像金属结构检测方法。
背景技术:
1、工业结构中出现的缺陷可能会导致严重事故或经济损失。因此,快速可靠地对金属结构健康进行评估至关重要。无损检测旨在不破坏结构的前提下检测结构中可能存在的缺陷。根据所采用的物理原理,无损检测技术包括:热成像检测、光学检测、声学检测、超声波检测(ut)、电磁检测等。每种技术都有其独特的优点和局限性,不同种类的技术可以互相补充。多模态检测技术融合是无损检测的发展方向。多模态融合是将不同模态的数据和信息进行关联和综合的信息处理技术。通常单一模态数据的信息是有限的,多模态融合方法可以保持各模态数据信息的多样性和完整性,提高检测的准确性和可靠性。
2、2020年h.li等人提出了一种多物理场检测系统,同步获取涡流检测和涡流热成像的结果。实验结果表明,该系统数据采集速度快,多模态融合算法充分利用了两种检测方法的优点。近年来,机器视觉技术快速发展,已经成为了结构表面检测最重要的方法。研究人员基于机器视觉系统建立了气泡图像数据集,用于密封容器的密封性检测和量化,开发了用于监控搅拌摩擦焊的机器视觉系统,使用数码相机获得焊缝表面图像并进行处理,以进行缺陷焊缝检测和分类。机器视觉检测系统可以高精度地捕获直观的表面形貌,从而识别和定位表面缺陷,并量化缺陷的表面轮廓。然而,由于输出视觉图像的平坦化以及照明引起的噪声,机器视觉无法准确测量表面缺陷的深度信息,无法获得对象中埋藏缺陷的信息。
3、结构中的埋藏缺陷结构安全构成潜在威胁。作为视觉检测的补充,其他检测技术,例如超声检测和电磁检测可用于埋藏缺陷检测。电磁无损检测方法通过测量导体在电磁场作用下产生的电或磁学特性的变化评估导体几何形状及相关性能,具有灵敏度高、不需要耦合剂、检测速度快等优势。阵列涡流检测是电磁检测技术的一种。阵列涡流检测探头将多个传感器以阵列形式排列,通过单次扫描就可以获得c-scan图像。与具有单个接收线圈/传感器的探头相比,阵列探头可以以更高的检测速度获得检测图像,不需要复杂的扫描设备来移动探头,并且具有更好的缺陷检测和量化能力。
4、传统的阵列涡流检测探头以线圈阵列来测量涡流检测信号,线圈感应的输出电压与激励频率正相关,故线圈阵列在高频激励下具有更高的灵敏度。线圈可在高频激励下检测低电导率材料和表面缺陷,但是线圈的信号幅值会随着频率的降低而快速减小,故它的工作频率范围有限,且在低频工作条件下信噪比较差。因此,以线圈作为接收传感器的探头对埋藏在结构中的缺陷具有有限的灵敏度。此外,线圈制作工艺的限制,一般线圈直径大于2mm,使得线圈阵列涡流探头结果图像的分辨率亦存在限制。为了解决以上问题,研究者们探索采用高灵敏度的磁场传感器取代接收线圈来测量低频磁场,例如:各向异性磁阻传感器(amr)、巨磁阻传感器(gmr)和隧道磁阻传感器(tmr)。2018年bernier等提出了一种使用gmr传感器的ect探头,具有良好的表面和埋藏裂纹检测能力。2022年n.zhang等开发了一种柔性tmr阵列探头来检测弯曲结构,实验结果表明该探头可以检测圆柱形和不规则形状样品中埋藏的缺陷。2018年c.ye等提出的tmr传感器阵列可以检测距多层铆接铝结构顶面8毫米处的紧固件头部下方的缺陷。这些探头可以测量表面和埋藏缺陷的响应,但是应当指出的是结构表面缺陷的信号通常比埋藏缺陷的信号强得多。因此,难以在结构表面不平整或表面有缺陷的情况下检出埋藏缺陷。三维数值仿真模型可以生成缺陷特征,如果模型建立得当,仿真结果可与实验信号相似。基于三维仿真模型,可计算表面缺陷和埋藏缺陷对信号的影响。
技术实现思路
1、本发明的目的是提供一种三维模型辅助电磁光融合成像金属结构检测方法,该检测方法可以全面、精确地检测表面、埋藏和重叠三种类型的缺陷。
2、为实现上述目的,本发明提供了一种三维模型辅助电磁光融合成像金属结构检测方法,包括以下步骤:
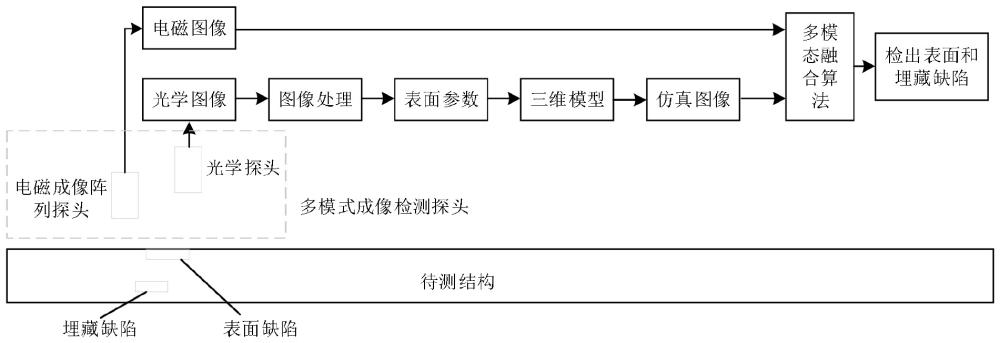
3、s1、通过光学检测探头获取光学照片,识别表面缺陷后,使用图像处理算法量化表面缺陷,得到光学检测结果;
4、s2、通过电磁成像阵列探头获取电磁检测图像,使用多模态融合算法来分离表面缺陷信号和埋藏缺陷信号,具体包括如下子步骤:
5、s21、建立电磁数值仿真模型,并将从光学检测结果中获取的表面缺陷尺寸和实验参数作为模型的输入参数,得到表面缺陷的仿真图像;
6、s22、将锚框与仿真图像、实验图像分别相乘,得到实验特征图像和仿真特征图像;
7、s23、对仿真图像进行空间配准和幅值校准,得到缩放后的仿真图像,再将缩放后的仿真图像从实验特征图像减去,实现仿真图像的分离,得到结果图像;
8、s24、从结果图像中识别重叠缺陷中的埋藏缺陷。
9、优选的,仿真图像和实验图像的分辨率相同。
10、优选的,步骤s1中,图像处理算法量化表面缺陷,得到光学检测结果,包括以下步骤:
11、s11、基于阈值对原始灰度图像进行二值化,并在二值化图像中提取缺陷的边缘;
12、s12、根据公式(1)、公式(2),基于缺陷边缘点的坐标计算缺陷长度和宽度:
13、(1)
14、(2)
15、其中,dl和dw是缺陷长度和宽度;npl和npw是光学图像中缺陷轮廓在长度和宽度方向的像素数;fl和fw是相机视野区域的长度和宽度;p1、p2、p3和p4为缺陷边缘的坐标点;表示和之间的像素数;
16、s13、利用光谱共聚焦传感器测量缺陷的深度。
17、优选的,其特征在于,步骤s23中,对表面缺陷的仿真图像进行空间配准和幅值校准,得到缩放后的图像,具体操作为:
18、s231、将仿真图像沿x轴和y轴二维移动,边缘位置用零填充,每次移动1个像素都会获得一幅新仿真图像;
19、s232、将每个新仿真图像与步骤s22中的锚框相乘,获得新的仿真特征图像;
20、s233、选择新的仿真特征图像中与实验特征图像最接近的图像作为空间配准的图像;
21、s234、通过公式(3)中的校正参数a缩放空间配准的图像的幅值来校正仿真图像的幅值,以此获取缩放后的仿真图像:
22、(3)。
23、优选的,步骤s234中,校正参数a是最小化缩放后的仿真图像与实验特征图像的差异的参数:
24、(4)
25、其中,是坐标变量;为锚框在一个方向上的像素数;表示坐标为的实验图像像素点的信号值;表示坐标为的校准后仿真图像像素点的信号值。
26、优选的,步骤s23中,将缩放后的仿真图像从实验特征图像减去实现仿真图像分离,得到结果图像,其公式如下:
27、(5)
28、其中,为结果图像。
29、因此,本发明采用上述一种三维模型辅助电磁光融合成像金属结构检测方法,其技术效果:该方法可以全面、精确地检测表面、埋藏和重叠三种类型的缺陷;从光学图像中可准确检出表面缺陷,并实现表面缺陷的高精度定位与量化;在电磁数值仿真模型的辅助下,融合电磁和光学结果可以识别重叠缺陷。
30、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!