复杂场景的重建方法、设备及存储介质与流程
本申请涉及图像处理,特别是涉及复杂场景的重建方法、设备及存储介质。
背景技术:
1、随着深度相机的普及,对场景空间的扫描和重建技术得到了飞速发展。在对场景重构之前,通常会从不同视角对场景进行信息采集。然而由于相机的差异或环境光线等其他因素,相机对于同一场景的深度测量可能会存在偏差,从而导致相机所覆盖的区域的重叠部分的深度信息有所不同,进而影响到场景重建的准确性和连贯性。
技术实现思路
1、本申请主要解决的技术问题是提供复杂场景的重建方法、设备及存储介质,能够准确地重建场景的倾斜表面和轮廓区域,并能够解决由于深度偏差引起的重建不完整和闪烁问题,从而高质量地对场景进行重建。
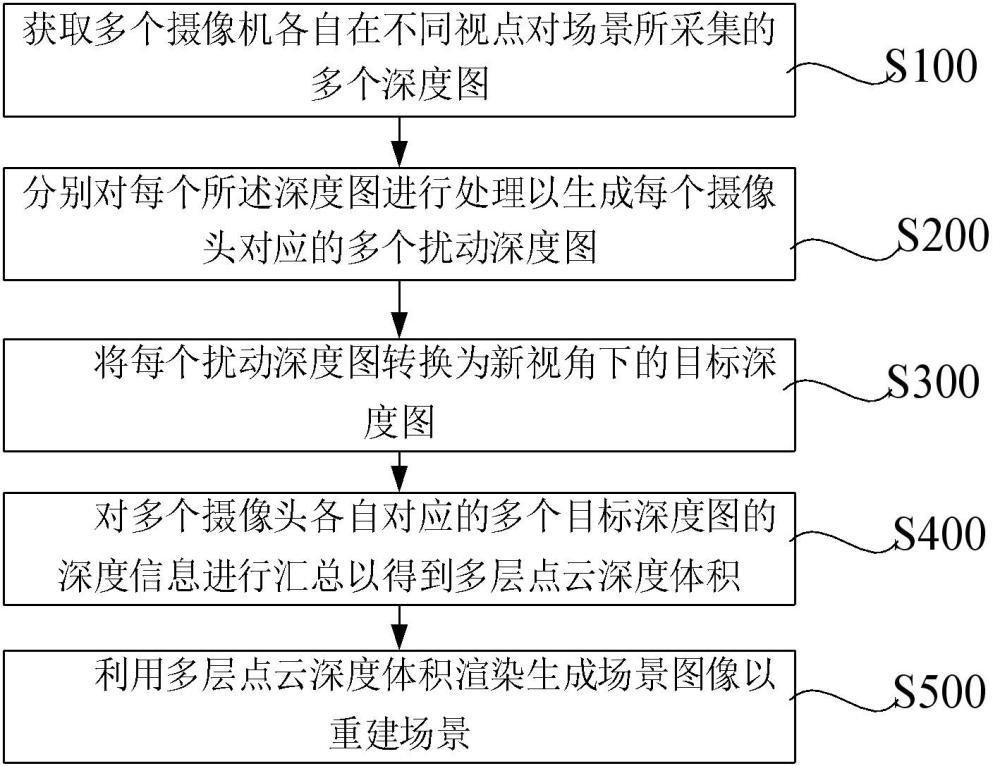
2、为解决上述技术问题,本申请采用的第一个技术方案是:提供一种方法,该方法包括:获取多个摄像机各自在不同视点对场景所采集的多个深度图;分别对每个深度图进行处理以生成每个摄像机对应的多个扰动的深度图;将每个扰动的深度图转换为新视角下的目标深度图;对多个摄像机各自对应的多个目标深度图的深度信息进行汇总以得到多层点云深度体积;利用多层点云深度体积渲染生成场景图像以重建场景。
3、为解决上述技术问题,本申请采用的第二个技术方案是:提供一种计算机设备,该计算机设备包括处理器、存储器和通信电路,存储器和通信电路耦接处理器,存储器存储有计算机程序,该处理器用于执行计算机程序以实现如上述本申请第一个技术方案提供的方法。
4、为解决上述技术问题,本申请采用的第三个技术方案是:提供一种计算机可读的存储介质,该计算机可读的存储介质存储计算机程序,该计算机程序能够被处理器执行以实现如上述本申请第一个和第二个技术方案提供的方法。
5、本申请的有益效果是:区别于现有技术的情况,通过获取多个摄像机在不同视点对场景所采集的多个深度图,之后对每个深度图进行处理以生成多个扰动深度图,如此在将每个扰动深度图转换为新视角下的目标深度图,对多个所述摄像机各自对应的多个目标深度图进行汇总以得到多层点云深度体积之后,对于场景中的每个点,多层点云深度体积中都存储了在不同视角以及不同扰动下的多个深度候选项。如此在利用多层点云深度体积渲染生成场景图像以重建场景时,场景图像中的每个像素点的深度值都是利用对应的多个深度候选项来确定的,因此能够更加准确地覆盖和重建场景中复杂的区域,例如倾斜表面和轮廓区域等,并且能够减少由于深度测量偏差导致的重建误差和闪烁,进而提高重建的质量。
技术特征:
1.一种复杂场景的重建方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求1所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求1所述的方法,其特征在于,
7.根据权利要求1所述的方法,其特征在于,
8.根据权利要求1所述的方法,其特征在于,
9.根据权利要求1所述的方法,其特征在于,
10.根据权利要求9所述的方法,其特征在于,
11.一种计算机设备,其特征在于,包括:处理器、存储器和通信电路;所述通信电路和所述存储器分别耦接所述处理器,所述存储器用于存储计算机程序,所述处理器用于读取并执行所述计算机程序,以实现如权利要求1-10任一项所述方法。
12.一种计算机可读的存储介质,其特征在于,存储有计算机程序,所述计算机程序能够被处理器读取并执行,以实现如权利要求1-10任一项所述的方法。
技术总结
本申请公开了复杂场景的重建方法、设备及存储介质。该方法包括获取多个摄像机各自在不同视点对场景所采集的多个深度图;分别对每个深度图进行处理以生成每个摄像机对应的多个扰动深度图;将每个扰动深度图转换为新视角下的目标深度图;对多个摄像机各自对应的多个目标深度图进行汇总以得到多层点云深度体积;利用多层点云深度体积渲染生成场景图像以重建场景。通过上述方式,本申请能够更准确地重建场景的倾斜表面和轮廓区域,并能够解决由于深度偏差引起的重建不完整和闪烁问题,从而高质量地对场景进行重建。
技术研发人员:吕少卿,俞鸣园,王克彦,曹亚曦,费敏健
受保护的技术使用者:浙江华创视讯科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!