基于视觉的翻车机入口轨道异常检测装置及方法与流程
本技术涉及数据处理,具体为一种基于视觉的翻车机入口轨道异常检测装置及方法。
背景技术:
1、翻车机是一种广泛应用于港口、电厂、矿山等场所的大型机械设备,用于翻卸和搬运火车、汽车等运输工具上的货物。翻车机入口轨道是整个系统的重要组成部分,其运行状态直接影响到系统的安全和效率。然而,由于长时间的使用、磨损、环境因素等影响,轨道可能会出现异常,如变形、断裂、异物等,这些异常如果不能及时发现和处理,可能会引发严重的安全事故。
2、现有技术中存在的翻车机异常检测工作由于异物对图像采集装置影响而导致检测精确度差的问题,使得最终关于翻车机能够得到更好地维护。
技术实现思路
1、本技术提供一种基于视觉的翻车机入口轨道异常检测装置及方法,以解决上述背景技术中存在的技术问题。
2、本技术解决其技术问题所采用的技术方案是:一种基于视觉的翻车机入口轨道异常检装置,包括:
3、图像采集模块:用于采用图像采集装置对翻车机入口轨道进行多角度图像采集得到待测目标图像集;
4、映射标识模块:用于预处理待测目标图像集并筛选出关键帧图像,对关键帧图像进行特征提取得到预处理图像特征,将预处理图像特征进行基于空间位置的映射标识,为每个特征赋予一个标识,赋予的标识和其对应的图像形成标记图像集;
5、特征提取模块:用于将标记图像集输入特征提取模型,特征提取模型通过获取样本图像数据进行卷积神经网络训练生成,特征提取模型包括若干个并行的特征提取分支,每个分支都对应一个特定的图像特征提取方法,特征提取模型将标记图像集进行标识识别并进行联合分析得到特征提取结果;
6、接缝状态确定模块:用于根据特征提取结果,确定轨道接缝状态;
7、检测判断模块:用于根据轨道接缝状态,结合通车状态信号,判断翻车机入口轨道是否异常。
8、本技术还提供一种基于视觉的翻车机入口轨道异常检测方法,包括:
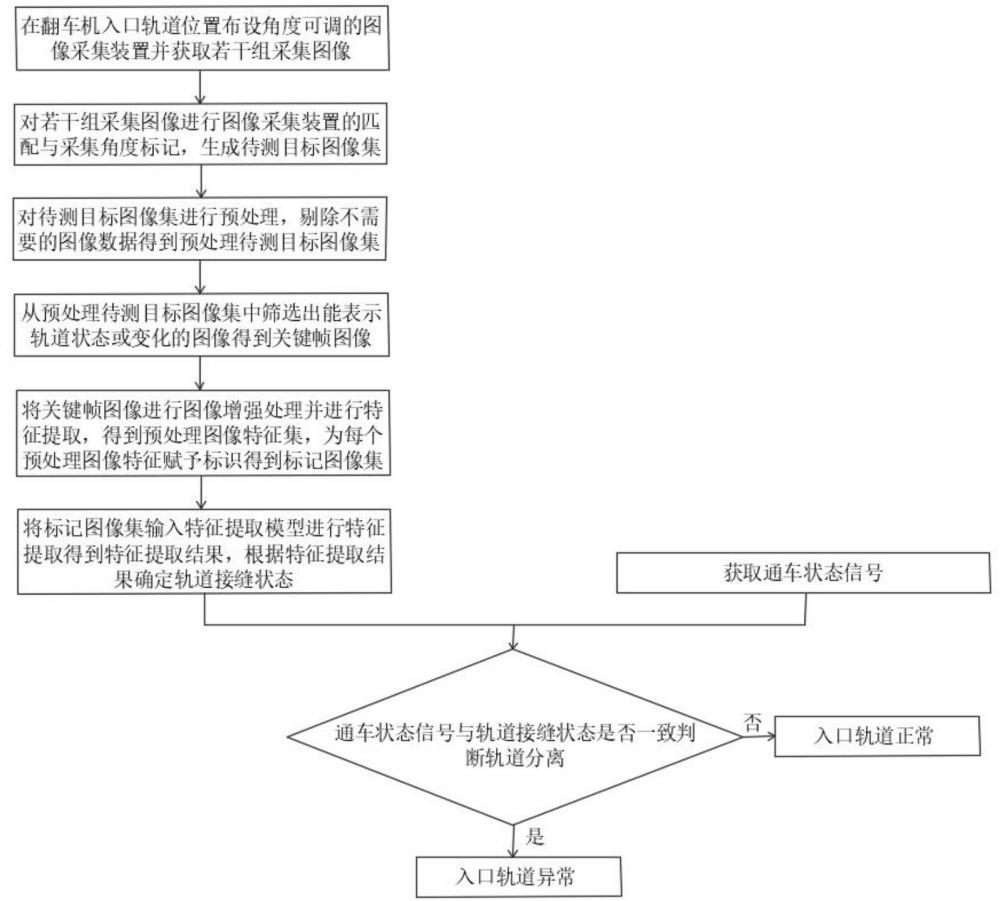
9、s1:采用图像采集装置对翻车机入口轨道进行多角度图像采集得到待测目标图像集;
10、s2:预处理待测目标图像集并筛选出关键帧图像,对关键帧图像进行特征提取得到预处理图像特征,将预处理图像特征进行基于空间位置的映射标识,为每个特征赋予一个标识,赋予的标识和其对应的图像形成标记图像集;
11、s3:将标记图像集输入特征提取模型,特征提取模型通过获取样本图像数据进行卷积神经网络训练生成,特征提取模型包括若干个并行的特征提取分支,每个分支都对应一个特定的图像特征提取方法,特征提取模型将标记图像集进行标识识别并进行联合分析得到特征提取结果;
12、s4:根据特征提取结果,确定轨道接缝状态;
13、s5:根据轨道接缝状态,结合通车状态信号,判断翻车机入口轨道是否异常。
14、本基于视觉的翻车机入口轨道异常检测方法,通过图像采集装置,对现场入口轨道进行多角度图像采集,确定待测目标图像集,然后预处理待测目标图像集,并进行基于空间位置的映射标识,确定标记图像集,调用样本图像数据,进行卷积神经网络训练,生成特征提取模型,再将标记图像集输入特征提取模型,进行标识识别并进行联合分析,确定特征提取结果,并确定轨道接缝状态,最后基于轨道接缝状态,结合进行通车状态信号,进行异常运控的触发示警,实现对翻车机入口轨道进行更加精确的检测,进而能够得到更好地维护,减少因翻车机入口轨道异常导致的事故隐患。
15、作为优选,s1:采用图像采集装置对翻车机入口轨道进行多角度图像采集得到待测目标图像集包括:采用图像采集装置在映射角度区间内进行采集角度自调,获取若干组与图像采集装置一一对应的采集图像,对若干组采集图像进行图像采集装置的匹配与采集角度标记得到待测目标图像集,图像采集装置根据翻车机入口轨道的大小形状进行布设,布设时需要考虑布设位置能够将翻车机的主体目标进行获取。在完成图像采集设备的布设后,每个图像采集装置都可以根据图像采集装置预设的采集角度范围进行调整。
16、作为优选,s2中关键帧图像的筛选方法包括:对各图像采集装置映射的待测目标图像集进行识别,并遍历待测目标图像集,筛选出能够表示轨道状态或变化的图像则为关键帧图像。
17、作为优选,s2中基于空间位置的映射标识包括:将关键帧图像在空间位置中进行表示,将物体从二维的图像中转移到三维空间中进行表示,并根据三维空间中的表示进行相应位置关系的确定,赋予每个特征一个标识,这个标识可以是特征在图像中的坐标,也可以是其他形式的标识。
18、作为优选,s3中特征提取模型训练方法包括:
19、a1:采集样本图像数据,使用样本图像数据监督训练第一特征提取分支,第一特征提取分支包括多级卷积层、多级池化层与全连接层;
20、a2:将样本图像数据输入第一特征提取分支进行精度预测,如果预测精度低于预设的精度阈值,将样本图像数据作为复训样本;
21、a3:使用复训样本,训练第二特征提取分支;
22、a4:重复进行迭代训练验证,获取第n特征提取分支;
23、a5:并行第一特征提取分支、第二特征提取分支直至第n特征提取分支即为特征提取模型。
24、通过不断构建更加优化的特征提取分支,能够使模型对复杂图像特征的处理能力得到有效增强,具有更高的预测精度。
25、作为优选,s3中特征提取模型将标记图像集进行标识识别并进行联合分析得到特征提取结果包括:
26、b1:各特征提取分支同步处理,确定若干组卷积特征,若干组卷积特征与特征提取分支一一对应;
27、b2:基于s2中的空间位置的映射标识对若干组卷积特征进行归类,确定若干类卷积特征;
28、b3:校对并择取若干类卷积特征中频率最高项作为特征提取结果。
29、根据联合分析确定特征提取结果,能够使得到的特征提取结果更具有代表性特征,该特征更能反映图像的总体信息。
30、作为优选,轨道接缝状态包括轨道连接状态与轨道分离状态;通车状态信号为轨道接缝状态为轨道连接状态时所发出的通行信号;通车状态信号与轨道接缝状态具有一致性,即出现通车状态信号必有轨道接缝状态出现,反之亦然,如果其中一个不出现,另一个也不会出现,因此,当轨道接缝状态和通车状态信号一致判定轨道处于连接状态,则判断翻车机入口轨道正常。
31、作为优选,设定预定运维周期,读取周期性节点的特征提取结果,确定轨道入侵异物,对轨道入侵异物进行视觉影响判定,若视觉影响度超限,则判断翻车机入口轨道异常,视觉影响度超限是指视觉影响判定表明异物对轨道运行和安全有显著影响,此时必须及时发现并处理轨道入侵的异物,从而提高轨道运行的安全性和效率。
32、本技术的实质性效果是:
33、1.本基于视觉的翻车机入口轨道异常检测方法,通过图像采集装置,对现场入口轨道进行多角度图像采集,确定待测目标图像集,然后预处理待测目标图像集,并进行基于空间位置的映射标识,确定标记图像集,调用样本图像数据,进行卷积神经网络训练,生成特征提取模型,再将标记图像集输入特征提取模型,进行标识识别并进行联合分析,确定特征提取结果,并确定轨道接缝状态,最后基于轨道接缝状态,结合进行通车状态信号,进行异常运控的触发示警,实现对翻车机入口轨道进行更加精确的检测,进而能够得到更好地维护,减少因翻车机入口轨道异常导致的事故隐患;
34、2.本基于视觉的翻车机入口轨道异常检测方法能够多角度采集图像并能够将采集图像与采集位置一一对应,当翻车机入口轨道异常,能够精确异常位置,便于检修;
35、3.本基于视觉的翻车机入口轨道异常检测方法将采集到的图像进行处理筛选并进行特征提取再结合通车状态信号对翻车机入口轨道检测,是的检测结果更加精准,便于对翻车机入口轨道的维护。
- 还没有人留言评论。精彩留言会获得点赞!