一种区域化最优基流分割方法、装置、设备和介质
本发明涉及基流分割,尤其涉及一种区域化最优基流分割方法、装置、设备和介质。
背景技术:
1、基流,即“基本径流”,它是河道中能常年存在的那部分径流。枯季河流所能维持的最小水流,由于枯水季节流域降水补给已终止或甚少,因此基流主要是由地下水补给。从概念上讲,基流是水流中与地表径流来源不同的部分。通常,基流被认为代表深层和浅层地下对水流贡献的总和。基流大小与流域面积和自然地理条件有关,它是水资源评价中一个很重要的特征值。了解基流对径流的贡献对于理解流域尺度水文学非常重要,包括地下水与地表水相互作用、地质和地貌对基流的影响、地下水补给率的估计等。
2、目前,基流没有办法直接测量得到,只能通过一些间接的方法估算,在现有方案中,可以通过利用数字滤波器法对1604个流域的径流序列分割出基流序列,然后利用长短期记忆神经网络模型(lstm)建立流域静态属性以及动态气象变量和基流之间的关系,从而利用流域静态属性变量以及动态气象变量来预测基流。
3、但上述方案通常仅能在全部流域使用,无法根据不同流域的基流进行区域化,且没有考虑到实测示踪时间序列的影响,导致基流分割的准确度较低。
技术实现思路
1、本发明提供了一种区域化最优基流分割方法、装置、设备和介质,解决了现有技术通常仅能在全部流域使用,无法根据不同流域的基流进行区域化,且没有考虑到实测示踪时间序列的影响,导致基流分割的准确度较低的技术问题。
2、本发明提供的一种区域化最优基流分割方法,包括:
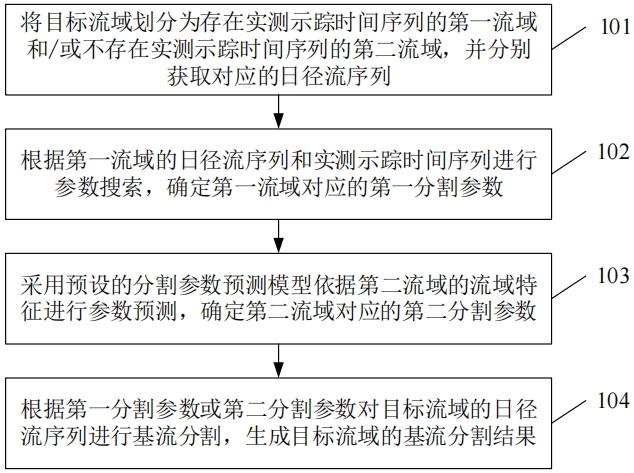
3、将目标流域划分为存在实测示踪时间序列的第一流域和/或不存在实测示踪时间序列的第二流域,并分别获取对应的日径流序列;
4、根据所述第一流域的日径流序列和所述实测示踪时间序列进行参数搜索,确定所述第一流域对应的第一分割参数;
5、采用预设的分割参数预测模型依据所述第二流域的流域特征进行参数预测,确定所述第二流域对应的第二分割参数;
6、根据所述第一分割参数或所述第二分割参数对所述目标流域的日径流序列进行基流分割,生成所述目标流域的基流分割结果。
7、可选地,所述根据所述第一流域的日径流序列和所述实测示踪时间序列进行参数搜索,确定所述第一流域对应的第一分割参数,包括:
8、以第一时间尺度提取所述实测示踪时间序列内的多个示踪最大值和多个示踪最小值;
9、采用样条插值分别连接全部所述示踪最大值和全部所述示踪最小值,生成在第二时间尺度下的基流示踪时间序列和快速流示踪时间序列;
10、初始化第一初始参数;所述第一初始参数包括第一序列长度和第一过滤系数;
11、按照所述第一初始参数对所述第一流域的日径流序列进行基流分割,确定对应的基流时间序列和快速流时间序列;
12、根据所述基流示踪时间序列、所述快速流示踪时间序列、所述基流时间序列和所述快速流时间序列,确定径流示踪时间序列;
13、根据所述实测示踪时间序列和所述径流示踪时间序列的均方根误差对所述第一初始参数进行网格搜索,确定所述第一流域对应的第一分割参数。
14、可选地,所述按照所述第一初始参数对所述第一流域的日径流序列进行基流分割,确定对应的基流时间序列和快速流时间序列,包括:
15、按照所述第一序列长度将所述第一流域的日径流序列划分为多个数据块;
16、分别选取各个所述数据块内的最小值点,构建最小值点序列;
17、若所述最小值点序列内任一最小值点与所述第一过滤系数的乘值大于相邻的最小值点,则删除对应的最小值点,得到基流时间序列;
18、计算所述第一流域的日径流序列与所述基流时间序列的差值,得到快速流时间序列。
19、可选地,所述根据所述基流示踪时间序列、所述快速流示踪时间序列、所述基流时间序列和所述快速流时间序列,确定径流示踪时间序列,包括:
20、计算所述基流示踪时间序列和所述基流时间序列之间的第一乘值;
21、计算所述快速流示踪时间序列和所述快速流时间序列之间的第二乘值;
22、计算所述第一乘值和所述第二乘值的第一和值;
23、计算所述第一和值和所述第一流域的日径流序列之间的比值,得到径流示踪时间序列。
24、可选地,所述根据所述实测示踪时间序列和所述径流示踪时间序列的均方根误差对所述第一初始参数进行网格搜索,确定所述第一流域对应的第一分割参数,包括:
25、计算所述实测示踪时间序列和所述径流示踪时间序列的均方根误差;
26、当所述均方根误差大于预设误差阈值时,在预设搜索范围内按照预设搜索步长对所述第一初始参数进行网格搜索,确定新的第一初始参数;其中,所述第一序列长度和所述第一过滤系数分别具有不同的搜索范围和搜索步长;
27、跳转执行所述按照所述第一初始参数对所述第一流域的日径流序列进行基流分割,确定对应的基流时间序列和快速流时间序列的步骤;
28、当所述均方根误差小于或等于预设误差阈值时,则将当前时刻的第一初始参数确定为所述第一流域对应的第一分割参数。
29、可选地,所述方法还包括:
30、获取所述第二流域对应的多组训练数据,并构建初始参数预测模型;其中,每组所述训练数据包括多种训练特征;
31、将各所述训练特征输入至所述初始参数预测模型,生成初始分割参数;
32、采用多组所述初始分割参数和所述第一分割参数对所述初始参数预测模型进行优化,生成分割参数预测模型。
33、可选地,所述采用多组所述初始分割参数和所述第一分割参数对所述初始参数预测模型进行优化,生成分割参数预测模型,包括:
34、计算多组所述初始分割参数对应的十分位数,并统计小于所述十分位数的初始分割参数的第一参数数量;
35、将各组所述初始分割参数、所述第一分割参数、所述第一参数数量和所述初始分割参数的第二参数数量代入到预设损失函数,计算损失函数值;
36、若所述损失函数值未满足模型条件,则按照预设梯度对所述初始参数预测模型内的模型参数进行调整,直至所述损失函数值满足模型条件,将当前时刻的初始参数预测模型确定为分割参数预测模型。
37、可选地,所述流域特征包括时间序列特征和多种流域相关特征,所述分割参数预测模型包括特征图提取层、控制门生成层、特征图叠加层和参数输出层,所述第二分割参数包括第二序列长度和第二过滤系数;所述采用预设的分割参数预测模型依据所述第二流域的流域特征进行参数预测,确定所述第二流域对应的第二分割参数,包括:
38、通过所述特征图提取层对所述第二流域的时间序列特征进行特征提取并降维,生成一维特征图;
39、通过所述控制门生成层分别对各种所述流域相关特征进行线性激活,生成多个特征控制门;
40、通过所述特征图叠加层对所述一维特征图与多个所述特征控制门依次迭代叠加并进行线性激活,生成多重特征控制图;
41、通过所述参数输出层对所述多重特征控制图分别进行平均池化和最大池化并进行线性处理后,生成平均池化特征图和最大池化特征图;
42、通过所述参数输出层拼接所述最大池化特征图和所述平均池化特征图并进行线性处理,确定所述第二流域的第二序列长度;
43、若存在多组所述第一分割参数,计算多组所述第一分割参数内的第一过滤系数之间的中位数,得到所述第二流域的第二过滤系数。
44、可选地,所述特征图提取层包括特征提取单元和降维单元,所述时间序列特征包括降水时间序列、温度时间序列和蒸散发时间序列;所述通过所述特征图提取层对所述第二流域的时间序列特征进行特征提取并降维,生成一维特征图,包括:
45、将所述降水时间序列、所述温度时间序列、所述蒸散发时间序列和所述 第二流域的日径流序列输入至所述特征提取单元,生成二维特征图;
46、通过所述降维单元对所述二维特征图进行降维,生成一维特征图。
47、可选地,所述特征图叠加层包括第一乘法单元、第二乘法单元、第三乘法单元、第一叠加单元、第二叠加单元、第一线性激活单元、第二线性激活单元和线性单元,所述特征控制门包括水文气象特征控制门、土壤属性特征控制门和流域地理特征控制门;所述通过所述特征图叠加层对所述一维特征图与多个所述特征控制门依次迭代相乘并进行线性激活,生成多重特征控制图,包括:
48、通过所述第一乘法单元采用所述一维特征图与所述水文气象特征控制门进行相乘后,通过所述第一线性激活单元进行线性激活,生成水文气象特征图;
49、通过所述第一叠加单元叠加所述一维特征图和所述水文气象特征图后,输入至第二乘法单元与所述土壤属性特征控制门相乘,并通过所述第二线性激活单元进行线性激活,生成水文土壤特征图;
50、通过所述第二叠加单元叠加所述一维特征图和所述水文土壤特征图后,输入至第三乘法单元与所述流域地理特征控制门相乘,并通过所述线性单元进行线性处理,生成多重特征控制图。
51、可选地,还包括:
52、若不存在所述第一分割参数,则从预设数据库中选取多组第三过滤系数,计算多组所述第三过滤系数的中位数,得到所述第二流域的第二过滤系数。
53、可选地,所述根据所述第一分割参数或所述第二分割参数对所述目标流域的日径流序列进行基流分割,生成所述目标流域的基流分割结果,包括:
54、若存在所述第一分割参数,则根据所述第一分割参数对所述目标流域的日径流序列进行基流分割,生成所述目标流域的基流分割结果;
55、若不存在所述第一分割参数,则根据所述第二分割参数对所述目标流域的日径流序列进行基流分割,生成所述目标流域的基流分割结果。
56、本发明第二方面提供了一种区域化最优基流分割装置,包括:
57、流域划分模块,用于将目标流域划分为存在实测示踪时间序列的第一流域和/或不存在实测示踪时间序列的第二流域,并分别获取对应的日径流序列;
58、第一分割参数搜索模块,用于根据所述第一流域的日径流序列和所述实测示踪时间序列进行参数搜索,确定所述第一流域对应的第一分割参数;
59、第二分割参数预测模块,用于采用预设的分割参数预测模型依据所述第二流域的流域特征进行参数预测,确定所述第二流域对应的第二分割参数;
60、基流分割模块,用于根据所述第一分割参数或所述第二分割参数对所述目标流域的日径流序列进行基流分割,生成所述目标流域的基流分割结果。
61、本发明第三方面提供了一种电子设备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如本发明第一方面任一项所述的区域化最优基流分割方法的步骤。
62、本发明第四方面提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现如本发明第一方面任一项所述的区域化最优基流分割方法。
63、从以上技术方案可以看出,本发明具有以下优点:
64、本发明通过将目标流域划分为存在实测示踪时间序列的第一流域和/或不存在实测示踪时间序列的第二流域,并分别获取对应的日径流序列;根据第一流域的日径流序列和实测示踪时间序列进行参数搜索,确定第一流域对应的第一分割参数;采用预设的分割参数预测模型依据第二流域的流域特征进行参数预测,确定第二流域对应的第二分割参数;根据第一分割参数或第二分割参数对目标流域的日径流序列进行基流分割,生成目标流域的基流分割结果。从而在更为细致的时间尺度上实现了基流分割,且通过区域化进行参数确定的方式,使其无论是否存在示踪剂数据均可完成准确度高的基流分割。
- 还没有人留言评论。精彩留言会获得点赞!