一种用于平板CT迭代重建的系统矩阵快速计算存储方法与流程
本发明涉及计算机断层扫描领域,具体涉及一种用于平板ct迭代重建的系统矩阵快速计算存储方法。
背景技术:
1、ct扫描的过程可以用以下公式简单表示:y=ax,其中y表示采集到的投影图像,x表示被扫描物体的衰减系数分布图,a即为系统矩阵,a的每一个元素aij表示探测器像素单元i对重建体素j的探测响应,可根据ct系统的几何计算得到。迭代重建的过程,可看作根据系统矩阵a不断的更新图像x,使得计算的投影y’和测量投影y误差最小化的过程。因此,系统矩阵a在迭代重建中具有关键作用。
2、对于平板ct,探测器像素单元通常很多,又由于三维成像高空间分辨率的要求,重建图像的体素就比较小,体素单元也很多。基于这两方面的因素,系统矩阵a是非常庞大的数据矩阵,如果重建中实时计算,那么每次迭代都反复计算将非常耗时,而庞大的数据量使得预先计算并存储起来非常耗费计算机资源。 即使考虑到每个体素j只能被少量探测器像素单元i所探测到,即系统矩阵a是稀疏的,对于平板ct,计算量和数据量依然是十分庞大的,极大的限制了迭代重建在平板ct中应用。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于平板ct迭代重建的系统矩阵快速计算存储方法,通过分别计算系统矩阵,提升系统处理效率减小矩阵数据量。
2、为实现上述目的,本发明提供了一种用于平板ct迭代重建的系统矩阵快速计算存储方法,包括:
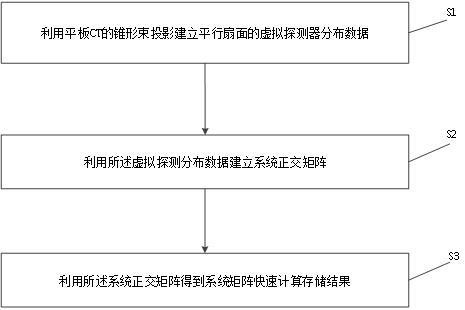
3、利用平板ct的锥形束投影建立基于平行扇面的虚拟探测分布数据;
4、利用所述虚拟探测分布数据建立系统正交矩阵;
5、利用所述系统正交矩阵得到系统矩阵快速计算存储结果。
6、优选的,所述利用平板ct的锥形束投影建立基于平行扇面的虚拟探测分布数据包括:
7、采集平板ct的锥形束投影;
8、利用平板ct的锥形束投影根据对应平板ct的扫描轨道进行数据重排处理得到平板ct的平行扇面投影数据;
9、根据所述平板ct的扫描轨道建立投影旋转中心;
10、利用所述平行扇面投影数据根据投影旋转中心得到基于平行扇面的虚拟探测分布数据;
11、其中,所述平行扇面投影数据为同一角度锥形束投影的相互平行扇面数据。
12、进一步的,利用所述虚拟探测分布数据建立系统正交矩阵包括:
13、根据所述虚拟探测分布数据对应系统几何建立物体三维直角坐标系;
14、利用所述物体三维直角坐标系得到虚拟旋转坐标系;
15、利用所述虚拟旋转坐标系对应系统矩阵进行方向分解处理分别得到虚拟旋转坐标系的第一矩阵与第二矩阵;
16、其中,所述物体三维直角坐标系的坐标轴为(x,y,z),所述虚拟旋转坐标系的坐标轴为(u,v,w),所述物体三维直角坐标系的z轴与虚拟旋转坐标系的v轴重合。
17、进一步的,利用所述虚拟旋转坐标系对应系统矩阵进行方向分解处理分别得到虚拟旋转坐标系的第一矩阵与第二矩阵包括:
18、利用所述虚拟旋转坐标系进行方向分解处理分别得到虚拟旋转坐标系的u轴方向与v轴方向;
19、根据所述虚拟旋转坐标系的u轴方向建立第一矩阵;
20、根据所述虚拟旋转坐标系的v轴方向建立第二矩阵。
21、进一步的,根据所述虚拟旋转坐标系的u轴方向建立第一矩阵包括:
22、根据虚拟旋转坐标系对应投影采集角度与层内像素计算重建体素的u轴方向长度的计算式如下:
23、
24、根据所述重建体素的u轴方向长度建立第一矩阵的计算式如下:
25、
26、其中,bij为第一矩阵,wu为重建体素u轴方向的投影长度,dxy为层内像素大小,β为投影采集角度,lu为重建体素的u轴方向长度与探测器像素长度的重叠区域,du为探测器像素长度。
27、进一步的,根据所述虚拟旋转坐标系的v轴方向建立第二矩阵包括:
28、根据所述虚拟旋转坐标系计算扇面顶点距离的计算式如下:
29、
30、根据所述虚拟旋转坐标系对应扇面顶点距离计算重建体素的v轴方向长度的计算式如下:
31、
32、根据所述重建体素的v轴方向长度建立第二矩阵的计算式如下:
33、
34、其中,l为扇面顶点到虚拟探测器的距离,r为真实系统的光源至旋转中心距离,u为重建体素虚拟旋转坐标的u轴坐标,m为重建体素的放大倍数,w为重建体素虚拟旋转坐标的w轴坐标,vj为重建体素在探测器v轴上的投影位置,wv为重建体素在虚拟探测器上的投影长度,lv为wv与探测器像素长度的重叠区域,α为重建体素的扇面顶点相对张角,z为重建体素的z轴坐标,dz为重建体素的层厚。
35、进一步的,利用所述系统正交矩阵得到系统矩阵快速计算存储结果包括:
36、利用所述系统正交矩阵进行优化处理得到系统更新优化矩阵;
37、根据所述系统更新优化矩阵得到系统矩阵快速计算存储结果。
38、进一步的,利用所述系统正交矩阵进行优化处理得到系统更新优化矩阵包括:
39、利用所述系统正交矩阵的第一矩阵进行优化处理得到第一优化矩阵的矩阵形式如下:
40、
41、利用所述系统正交矩阵的第二矩阵进行优化处理得到第二优化矩阵的矩阵形式如下:
42、
43、利用所述第一优化矩阵与第二优化矩阵作为系统更新优化矩阵;
44、其中,b为第一优化矩阵,c为第二优化矩阵,nx、ny、nz、nβ、nu、nv为矩阵元素,所述nu=nv=3。
45、进一步的,根据所述系统更新优化矩阵得到系统矩阵快速计算存储结果包括:
46、根据所述系统更新优化矩阵的第二优化矩阵建立更新放大倍数维度;
47、利用所述更新放大倍数维度对第二优化矩阵进行再次优化得到第二更新优化矩阵的矩阵形式如下:
48、
49、利用所述系统更新优化矩阵的第一优化矩阵与第二更新优化矩阵得到系统矩阵快速计算存储结果;
50、其中,c1为第二更新优化矩阵,nm为更新放大倍数维度,nz与nv为矩阵元素,nm为nx、ny与nβ的等效替代维度。
51、进一步的,利用所述系统更新优化矩阵的第一优化矩阵与第二更新优化矩阵得到系统矩阵快速计算存储结果包括:
52、获取所述系统更新优化矩阵的第一优化矩阵的矩阵最大值作为第一矩阵最大值;
53、获取所述系统更新优化矩阵的第二更新优化矩阵的矩阵最大值作为第二矩阵最大值;
54、利用所述第一矩阵最大值与第二矩阵最大值进行归一化处理得到系统更新优化矩阵的矩阵归一化最大值作为系统矩阵快速计算存储结果。
55、与最接近的现有技术相比,本发明具有的有益效果:
56、采用基于平行扇面的重排数据,极大简化了计算;将系统矩阵分解到正交的两个方向表达,计算简单易实现;构造基于放大倍数的新维度,给系统矩阵降维,极大的减小了系统矩阵大小;通过对数据的归一化压缩,进一步减小系统矩阵大小,该方法将系统矩阵计算简化,矩阵大小大幅缩小,实现了预计算系统矩阵的平板ct的迭代重建。
- 还没有人留言评论。精彩留言会获得点赞!