一种施工现场用无人值守式红外监控装置的制作方法
[0001]
本发明涉及安防设备技术领域,尤其涉及一种施工现场用无人值守式红外监控装置。
背景技术:
[0002]
施工工地人员众多,且人员较为繁杂,极易发生传染病大规模积聚性传染,因此有必要对进入施工工地的人员进行筛查,sars、mers或新型冠状病毒肺炎等传染病被感染后一般表征为发热,因此一般采用红外测温门进行筛查,但是现有的红外测温门需要人看守,以避免测温异常的潜在患者闯关,造成其他人感染,并且如果看守的人是病毒携带者,看守者由于每天在红外测温门处接触大量人群,极有可能成为超级传播者,因此现有的红外测温门存在安全隐患大和浪费人力的问题。
技术实现要素:
[0003]
为了解决以上现有技术的缺点和不足之处,本发明的首要目的是提供一种施工现场用无人值守式红外监控装置。
[0004]
本发明的技术方案是:一种施工现场用无人值守式红外监控装置,包括:门框,所述门框呈倒u字形;红外测温传感器,所述红外测温传感器设置在门框上,红外测温传感器测温方向对着门框内的前部;还包括:闸机,所述闸机位于门框内,闸机开关将门框的通道打开和关闭;控制器,所述控制器与红外测温传感器电连接,控制器与闸机电连接。
[0005]
进一步地,还包括:所述红外测温传感器上设有菲涅尔透镜。
[0006]
进一步地,还包括:智能摄像头,所述智能摄像头与控制器电连接,智能摄像头设置在门框上部,智能摄像头的拍摄范围位于门框内的前方,智能摄像头包括图像识别系统。
[0007]
进一步地,还包括:扬声器,所述扬声器与控制器电连接。
[0008]
进一步地,还包括:转动装置,所述转动装置包括本体和第一步进电机,本体连接在门框上部后表面,第一步进电机固定连接在本体上,第一步进电机与控制器电连接,第一步进电机转轴与水平面和门框后表面平行,红外测温传感器固定连接在第一步进电机的转轴上,红外测温传感器的测量方向与第一步进电机转轴垂直。
[0009]
进一步地,还包括:光电开关,所述光电开关包括激光发射器和激光接收器,激光发射器和激光接收器左
右对称设置在门框内的侧表面,激光发射器和激光接收器位于闸机前方,激光接收器与控制器电连接。
[0010]
进一步地,还包括:水平移动装置,所述水平移动装置包括第二步进电机和丝杆,所述第二步进电机固定连接在门框上部后表面,丝杆与第二步进电机转轴固定连接,丝杆中心轴线与水平面和门框后表面平行,第二步进电机与控制器电连接;丝孔,所述丝孔设置在本体上,丝孔与丝杆相匹配,丝孔贯通本体,本体通过丝孔安装在丝杆上;滑杆,所述滑杆固定连接在门框上部后表面,滑杆与丝杆平行;滑孔,所述滑孔设置在本体上,滑孔与滑杆相匹配,滑孔贯通本体,本体通过滑孔滑动安装在滑杆上。
[0011]
进一步地,还包括:挡板,所述挡板固定连接在门框后表面,挡板位于丝杆和第二步进电机正上方,挡板在水平面上的投影将转动装置和水平移动装置在水平面上的投影完全覆盖。
[0012]
一种所述的施工现场用无人值守式红外监控装置的控制方法,所述方法包括以下步骤:s01、控制器检测光电开关的信号,当激光接收器接收到的激光信号中断,控制器控制第二步进电机正转反转使本体沿丝杆长度方向往复运动;s02、本体同一方向每移动一个丝杆长度,控制器控制第一步进电机向下转动1
°
~10
°
直到红外温度传感器到水平面的逆时针夹角大于60
°
;s03、当激光接收器接收到的激光信号中断,智能摄像头拍摄通过者的图像并判断是否带口罩;s04、控制器判断智能摄像头和红外温度传感器的检测结果,如果智能摄像头判断未带口罩或红外温度传感器温度超过设定值,控制器控制闸机关闭,如果智能摄像头判断带口罩且红外温度传感器温度未过设定值,控制器控制闸机打开。
[0013]
本发明的有益效果是:与现有技术相比,本发明通过在门框上设置红外测温传感器,通过红外测温传感器测量通过者的体温,控制器判断红外测温传感器的测量值,如果测量值正常,控制器控制闸机打开放行通过,如果测量值异常,控制器控制闸机关闭,阻止体温异常者通过。从而实现无人值守式人流体温监测筛选放行,减少了人力浪费,减少了值守人员作为超级传播者带来的风险。
附图说明
[0014]
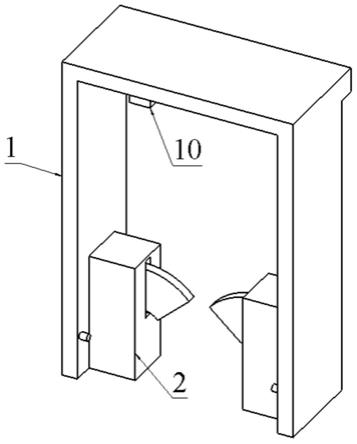
图1为本发明实施实例1从前部看的立体视图;图2为本发明实施实例1的前视图;图3为本发明实施实例1的后视图;图4为图3 a处的局部示意图;图5为图3 b处的局部示意图;图6为本发明实施实例1从后部看的立体视图;图7为本发明实施实例1的电路连接示意图。
具体实施方式
[0015]
下面结合附图及具体的实施例对发明进行进一步介绍:实施例1:参考图1至图7,一种施工现场用无人值守式红外监控装置,包括:门框1,所述门框1呈倒u字形;红外测温传感器3,所述红外测温传感器3设置在门框1上,红外测温传感器3测温方向对着门框1内的前部;还包括:闸机2,所述闸机2位于门框1内,闸机2开关将门框1的通道打开和关闭;控制器8,所述控制器8与红外测温传感器3电连接,控制器8与闸机2电连接。这里的控制器8可采用arduino、树莓派或plc等带外围电路的控制器,红外测温传感器3可采用优创型号为am412的红外测温传感器,闸机2可采用mai型号为m9005八角的闸机。
[0016]
与现有技术相比,本发明通过在门框1上设置红外测温传感器3,通过红外测温传感器3测量通过者的体温,控制器8判断红外测温传感器3的测量值,如果测量值正常,控制器8控制闸机2打开放行通过,如果测量值异常,控制器8控制闸机2关闭,阻止体温异常者通过。从而实现无人值守式人流体温监测筛选放行,减少了人力浪费,减少了值守人员作为超级传播者带来的风险。
[0017]
进一步地,还包括:所述红外测温传感器3上设有菲涅尔透镜7。
[0018]
菲涅透镜7一是起到聚焦作用,,将热释红外信号折射在红外测温传感器3上,增加对微小红外信号的探测灵敏度;第二个作用是将探测区域内分为若干个明区和暗区,使进入探测区域的移动物体能以温度变化的形式在红外测温传感器3上产生变化热释红外信号,使接收到的红外信号以忽强忽弱的脉冲形式输入,增加红外信号的能量幅度,增加红外测温传感器3的探测灵敏度。
[0019]
进一步地,还包括:智能摄像头9,所述智能摄像头9与控制器8电连接,智能摄像头9设置在门框1上部,智能摄像头9的拍摄范围位于门框1内的前方,智能摄像头9包括图像识别系统。
[0020]
智能摄像头9拍摄通过者的图像,图像识别系统可判断通过者是否戴口罩,如果未带口罩,控制器8控制闸机2关闭不允许通过。图像识别系统可通过机器学习来实现,将带口罩和不带口罩的图像作为输入数据训练分类模型,将带口罩的图像标记以训练模型,不断的重复训练提高模型的判断精准度。
[0021]
进一步地,还包括:扬声器10,所述扬声器10与控制器8电连接。
[0022]
当检测到体温异常者时,扬声器10可发出警告,提醒其它人保持距离,避免过于靠近引起感染。
[0023]
进一步地,还包括:转动装置4,所述转动装置4包括本体401和第一步进电机402,本体401连接在门框1上部后表面,第一步进电机402固定连接在本体401上,第一步进电机402与控制器8电连接,第一步进电机402转轴与水平面和门框1后表面平行,红外测温传感器3固定连接在第一步进电机402的转轴上,红外测温传感器3的测量方向与第一步进电机402转轴垂直。
[0024]
使得红外测温传感器3可上下扫描,避免人的身高差异导致有的人能够被测量到有的人不能被检测到的问题。
[0025]
进一步地,还包括:光电开关6,所述光电开关6包括激光发射器601和激光接收器602,激光发射器601和激光接收器602左右对称设置在门框1内的侧表面,激光发射器601和
激光接收器602位于闸机2前方,激光接收器602与控制器8电连接。
[0026]
光电开关6可判断通过者位置以便测量,当通过者遮挡激光发射器601的激光时才开始测量,提高了检测的精准度,避免通过者站错位置降低测量灵敏度。
[0027]
进一步地,还包括:水平移动装置5,所述水平移动装置5包括第二步进电机501和丝杆502,所述第二步进电机501固定连接在门框1上部后表面,丝杆502与第二步进电机501转轴固定连接,丝杆502中心轴线与水平面和门框1后表面平行,第二步进电机501与控制器8电连接;丝孔,所述丝孔设置在本体401上,丝孔与丝杆502相匹配,丝孔贯通本体401,本体401通过丝孔安装在丝杆502上;滑杆503,所述滑杆503固定连接在门框1上部后表面,滑杆503与丝杆平行;滑孔,所述滑孔设置在本体401上,滑孔与滑杆503相匹配,滑孔贯通本体401,本体401通过滑孔滑动安装在滑杆503上。
[0028]
水平移动装置5使得红外测温传感器3可左右移动,避免通过者站偏导致测量不到通过者,提高了红外测温传感器3的检测精准度。
[0029]
进一步地,还包括:挡板11,所述挡板11固定连接在门框1后表面,挡板11位于丝杆502和第二步进电机501正上方,挡板11在水平面上的投影将转动装置4和水平移动装置5在水平面上的投影完全覆盖。
[0030]
挡板11可遮挡转动装置4和水平移动装置5,避免转动装置4和水平移动装置5日晒雨淋被腐蚀不能工作。
[0031]
一种所述的施工现场用无人值守式红外监控装置的控制方法,所述方法包括以下步骤:s01、控制器8检测光电开关6的信号,当激光接收器602接收到的激光信号中断,控制器8控制第二步进电机501正转反转使本体401沿丝杆502长度方向往复运动;s02、本体401同一方向每移动一个丝杆502长度,控制器8控制第一步进电机402向下转动1
°
~10
°
直到红外温度传感器3到水平面的逆时针夹角大于60
°
;s03、当激光接收器602接收到的激光信号中断,智能摄像头9拍摄通过者的图像并判断是否带口罩;s04、控制器8判断智能摄像头9和红外温度传感器3的检测结果,如果智能摄像头9判断未带口罩或红外温度传感器3温度超过设定值,控制器8控制闸机2关闭,如果智能摄像头9判断带口罩且红外温度传感器3温度未过设定值,控制器8控制闸机2打开。
[0032]
本发明先通过激光接收器602信号中断来判断人与红外温度传感器3和智能摄像头的距离,从而保证距离足够短以保证监测精度,然后第二步进电机501转动带动丝杆502转动使得本体沿丝杆502长度方向往复运动,使红外温度传感器3全面扫查门框1前方,从而避免通过者站偏斜导致检测不到通过。控制器8根据智能摄像头9和红外温度传感器3的共同结果来决定闸机2是否打开,判断依据更加精准,避免不符合防护标准者进入工地。
[0033]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1