一种智能货斗及其自动售货机的制作方法
1.本发明涉及自动售货机领域,尤其涉及一种智能货斗以及用于上述智能货斗的自动售货机。
背景技术:
2.自动售货机是一种基于投币及扫描等技术的自动付货设备,自动售货机的种类很多,其中有一类售货机是通过货斗从货到上取商品,再将货斗移动至取货口处,用户通过取货口取走货斗内的商品。当货斗打开时,用户能够将手伸入至货斗中,若货斗与货道之间没有任何阻隔,则容易导致用户盗取货道上的非购买产品。另外,对于某些需要保温或者冷藏的物品,也需要将外界与自动售货机内部货品的储存环境进行隔离,此时就要求将货斗与货道间歇性隔断。
3.中国专利文献公开号cn210627353u公开了本发明公开了一种自动售货机,该自动售货机包括柜体、设置于柜体内部的货架和取货斗,以及防盗机构,取货斗具有取货位置和出货位置,取货斗位于取货位置时,取货斗能够接收自货架输出的货物;取货斗位于出货位置时,能够通过柜体上的取货口取走所述取货斗内的货物,防盗机构包括防盗板和传动组件;防盗板与柜体活动连接,防盗板具有缩进货架的避让位置和伸出货架且位于货架与取货口之间的防盗位置,取货斗被配置运动时能够驱动传动组件带动防盗板由避让位置运动至防盗位置,且当取货斗位于出货位置时,防盗板位于防盗位置。这种自动售货机利用防盗板的运动实现防盗,这种结构的自动售货机仅能够从某个方位实现对盗货者进行阻挡,无法真正意义上隔离货斗与货道之间的连接通道。
技术实现要素:
4.为了克服现有技术的缺陷,本发明所要解决的技术问题在于提出一种智能货斗,利用活动集门的全方位包覆使得货斗与货道所在空间被完成隔离,并自动寻找货道,仅当货道与货斗对准后才激活货道,起到双重保护的效果。
5.为达此目的,本发明采用以下技术方案:
6.本发明提供的一种智能货斗,包括斗体、货斗对接装置、及隔离集门装置,所述货斗对接装置用于货道寻址及执行货道送电开关操作,所述隔离集门装置用于隔绝斗体与货道之间的通道,所述隔离集门装置包覆在所述斗体的右侧壁及一部分顶壁上,所述货斗对接装置位于斗体内,当所述隔离集门装置的活动集门被打开后,所述货斗对接装置中的寻址传感器及送电总成沿所述斗体的一侧壁移动,当所述寻址传感器找到相应的货道后,所述送电总成将所述货道的输送开关触点电导通,以使得所述货道将货品输送至所述斗体内。
7.本发明进一步地技术方案在于,所述隔离集门装置包括活动集门、至少一条的门体滑道以及集门驱动装置,所述集门驱动装置的动力轮的一部分位于所述门体滑道内,所述动力轮驱动所述活动集门可沿着至少一条的所述门体滑道滑动,以使得所述斗体与货道
之间的通道被打开及关闭。
8.本发明进一步地技术方案在于,所述货斗对接装置包括寻址传感器、送电总成、寻址支架以及位移驱动器,所述寻址传感器及所述送电总成均位于所述斗体的货物入口处,所述位移驱动器及所述寻址支架均位于所述斗体内,所述位移驱动器通过所述寻址支架驱动所述寻址传感器及所述送电总成沿所述斗体的一侧壁移动,当所述寻址传感器找到相应的货道后,所述送电总成将所述货道的输送开关触点导通。
9.本发明进一步地技术方案在于,所述斗体的第一侧板与第二侧板之间设置有斜向货物滑道,所述斜向货物滑道的进货端设置有驱动辊。
10.本发明进一步地技术方案在于,所述斜向货物滑道的取货端设置有前门,所述前门位于所述斗体前端的取货出口处,所述前门在前门驱动器驱动作用下沿所述取货出口的竖直方向上下运动,以使得所述取货出口打开或关闭。
11.本发明进一步地技术方案在于,所述前门驱动器包括门滑轨、门滑块、门连接板以及竖向位移器,所述门连接板包括驱动连接板、中间固定板以及门体固定板,所述门体固定板固定在所述前门的内侧壁上,所述门滑轨固定在第一侧板的边缘处,并沿所述第一侧板的长度方向延伸,所述门滑块与所述门滑轨滑动配合,所述中间固定板固定在所述门滑块上,所述竖向位移器则与所述驱动连接板固定连接,所述驱动连接板通过所述中间固定板与所述门体固定板固定连接。
12.本发明进一步地技术方案在于,所述门滑轨的一侧设置有与所述驱动连接板配合使用的第四微动开关及第五微动开关,所述第四微动开关通过第一开关支架与所述第一侧板的侧壁上部固定连接,所述第五微动开关通过第二开关支架与所述第一侧板的侧壁下部固定连接。
13.本发明进一步地技术方案在于,所述竖向位移器包括门驱动电机、第三链轮、第二传送带及第四链轮,所述门驱动电机的动力输出端固定有第三链轮,所述第二传送带的一端套设在所述第三链轮上,所述第二传送带的另一端套设在所述第四链轮上,所述驱动连接板固定在所述第二传送带上。
14.本发明进一步地技术方案在于,所述斗体的第二侧板的上部设置有上止点微动开关,所述第二侧板的下部设置有下止点微动开关。
15.本发明还提供的一种自动售货机,用于上述的智能货斗,包括货道、斗体、货斗对接装置及隔离集门装置,所述隔离集门装置包覆在所述斗体的右侧壁及一部分顶壁上,所述货斗对接装置位于斗体内,当所述隔离集门装置的活动集门被打开后,所述货斗对接装置中的寻址传感器及送电总成沿所述斗体的一侧壁移动,当所述寻址传感器通过所述货道上标记或者应答器找到相应的货道后,所述送电总成将所述货道的输送开关触点进行电导通。
16.本发明的有益效果为:
17.本发明提供的智能货斗,设置可沿斗体内壁的门体滑道滑动的活动集门,活动集门能够全方位包覆货物入口与货道之间开口,使得使得货斗与货道之间通道被完全隔断。其次设置有可移动的寻址传感器,通过寻址传感器可精准找寻到货道的位置,还设置有送电总成使得只有当寻址传感器准确确定货道的位置后,货道的输送开关触点才会被打开,货品才会被输送至货斗内,这种方式能够有效避免控制误差导致货品有时会出现在货斗与
货道没有对准的情况下输送货品,导致货品未进入货斗的货物入口或者货品卡在货斗与货道之间导致货品损毁,采用本申请提供的智能货斗既能够有效防止货品被盗及售货机内外环境的隔离,又能够确保合适的货品落入至合适的斗体中,具有双保险作用。
附图说明
18.图1是本发明具体实施方式中提供的智能货斗的第一立体图;
19.图2是本发明具体实施方式中提供的智能货斗的侧视图,第二侧板未示出;
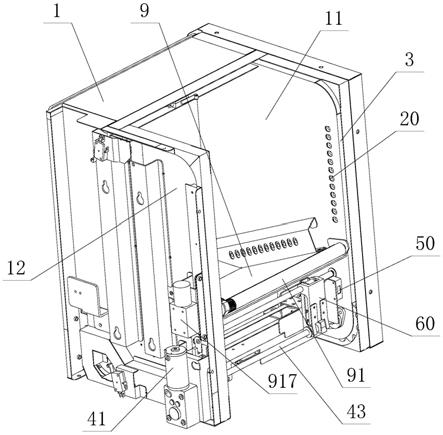
20.图3是本发明具体实施方式中提供的智能货斗的侧视立体图,第二侧板未示出;
21.图4是本发明具体实施方式中提供的智能货斗的俯视立体图,第二侧板未示出;
22.图5是本发明具体实施方式中提供的智能货斗的仰视立体图,第二侧板未示出;
23.图6是本发明具体实施方式中提供的驱动辊组件的立体图;
24.图7是本发明具体实施方式中提供的驱动辊组件的侧视图;
25.图8是本发明具体实施方式中提供的集门驱动装置的立体图;
26.图9是本发明具体实施方式中提供的货斗对接装置的第一立体图;
27.图10是本发明具体实施方式中提供的货斗对接装置的第一立体a局部图;
28.图11是本发明具体实施方式中提供的货斗对接装置的第二立体图;
29.图12是本发明具体实施方式中提供的货斗对接装置的第二立体局部截图;
30.图13是本发明具体实施方式中提供的货斗对接装置的俯视图;
31.图14是本发明具体实施方式中提供的智能货斗的第二立体图;
32.图15是本发明具体实施方式中提供的智能货斗的第二立体b局部图;
33.图16是本发明具体实施方式中提供的智能货斗的右侧视图;
34.图17是本发明具体实施方式中提供的智能货斗的左侧视图。
35.图中:
36.1、斗体;3、门体滑道;4、集门驱动装置;31、上水平滑道;32、竖向滑道;33、下水平滑道;34、第一弧形过渡道;35、第二弧形过渡道;36、环形过渡道;37、末端水平滑道;41、集门驱动电机;42、齿轮组;43、集门动力杆;44、动力轮;45、变速箱;5、第一微动开关;6、底部连接板;11、第一侧板;12、第二侧板;7、第二微动开关;8、连接槽;9、斜向货物滑道;911、第一驱动辊;912、第二驱动辊;913、第一辊连接板;914、第二辊连接板;915、第一辊齿轮;916、第二辊齿轮;917、辊驱动电机;918、辊连接底板;10、第三微动开关;20、竖向电眼阵列;30、斜向电眼阵列;40、前门;50、寻址传感器;60、送电总成;70、寻址支架;80、位移驱动器;601、滑动架;602、导向杆;603、旋转导片;031、触片;604、旋转驱动器;605、第一轴套;606、第二轴套;701、主支撑板;702、侧支撑板;901、第一类接近传感器;902、第二类接近传感器;011、第一耳板;012、第二耳板;703、动力连接板;801、位移驱动电机;802、第一链轮;803、第一传送带;804、第二链轮;805、辊支架;041、旋转驱动电机;042、主动齿轮;043、从动齿轮;90、前门驱动器;903、门滑轨;904、门滑块;905、门连接板;906、竖向位移器;051、驱动连接板;052、中间固定板;053、门体固定板;054、第四微动开关;055、第五微动开关;056、第一开关支架;057、第二开关支架;061、门驱动电机;062、第三链轮;063、第二传送带;064、第四链轮;100、上止点微动开关;200、下止点微动开关;300、货道。
具体实施方式
37.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
38.实施例一
39.如图1至图17所示,本实施例中提供的一种智能货斗,包括斗体1、货斗对接装置及隔离集门装置,货斗对接装置用于货道寻址及执行货道送电开关操作,隔离集门装置用于隔绝斗体1与货道300之间的通道,隔离集门装置包覆在斗体1的右侧壁及一部分顶壁上,货斗对接装置位于斗体1内,当隔离集门装置的活动集门被打开后,货斗对接装置中的寻址传感器50及送电总成60沿斗体1的一侧壁移动,当寻址传感器50找到相应的货道300后,送电总成60将货道300的输送开关触点电导通,以使得货道300将货品输送至斗体1内。这种方式能够有效避免控制误差导致货品有时会出现在斗体1与货道300没有对准的情况下输送货品,导致货品未进入斗体1的货物入口或者货品卡在斗体1与货道300之间导致货品损毁,采用本申请提供的智能货斗既能够有效防止货品被盗及售货机内外环境的隔离,又能够确保合适的货品落入至合适的斗体1中,具有双保险作用。
40.如图1至图8所示,隔离集门装置包括活动集门、至少一条的门体滑道3以及集门驱动装置4,集门驱动装置4的动力轮44的一部分位于门体滑道3内,集门驱动装置4驱动活动集门可沿着至少一条的门体滑道3滑动,使得隔绝斗体1与货道300之间的通道被打开及关闭。活动集门2用于斗体1的货物入口的打开及闭合,至少一条的门体滑道3位于斗体1的内侧壁上,集门驱动装置4的动力轮44的一部分位于门体滑道3内,集门驱动装置4驱动活动集门2沿着至少一条的门体滑道3滑动,优选地,本实施例中提供的智能货斗包含两条门体滑道3,两条门体滑道3对称设置在第一侧板11与第二侧板12上,此时第一侧板11与第二侧板12、活动集门以及斗体1可组成一个完全密闭的隔离空间,活动集门主要用于斗体1的货物入口及顶部的密闭,斗体1的货物出口处设置有前门40,底部设置有斜向货物滑道9。活动集门类似于卷闸门,其能够弯曲,但本实施例提供的活动集门并不成卷,而隐匿在门体滑道3的延长段,也即下文中的环形过渡道36及末端水平滑道37,当然若设置为成卷的活动集门,理论上也是可行的,只是成卷后占用空间较大。活动集门的两侧边均嵌入至门体滑道3内,且两侧边设置有链条(图中未示出),动力轮44优选配置为链轮,当集门驱动装置4中的动力轮44,会通过链轮与链条之间链式传动驱动活动集门沿门体滑道3内移动,从而实现货物入口与货道300之间通道的打开及闭合。由于活动集门是柔性的,当合理设置其门体滑道3的形状后其能够依据斗体1的货物入口形状全方位包覆货物入口与货道300之间开口,这就使得使得货斗1与货道300之间通道被完全隔断,不仅具备良好的防盗效果,提升了自动售货机的安全性,而且能够有效隔绝自动售货机外界环境对其内部货品环境影响,尤其适用于某些需要保温或者冷藏的高价值货品。
41.为了便于斗体1的货物入口的侧面开口及顶部开口进行全方位包覆,进一步地,门体滑道3包括上水平滑道31、竖向滑道32以及下水平滑道33,上水平滑道31的一端通过第一弧形过渡道34与竖向滑道32的上端相连,竖向滑道32的下端通过第二弧形过渡道35与下水平滑道33的一端相连。其中,两条竖向滑道32分别位于第一侧板11与第二侧板12的侧边所在处,通常两条竖向滑道32均位于第一侧板11与第二侧板12上靠近货道300的侧边,使得活动集门能够实现货物入口与货道300之间通道的打开及闭合,上水平滑道31、竖向滑道32以及下水平滑道33的设置使得斗体1靠近货道300的整个侧面、顶面以及部分顶面被包覆,使
得使得货斗1与货道300之间通道可以被完全隔断,货斗1内部环境被隔离。当活动集门从打开状态过渡到闭合状态时,活动集门依次经过竖向滑道32、第一弧形过渡道34以及上水平滑道31直至将斗体1的货物入口的侧面开口及顶部开口完全包覆,实现完全隔绝。
42.为了便于斗体1的货物入口打开时活动集门被隐匿,且占用空间尽量少,进一步地,门体滑道3还包括环形过渡道36及末端水平滑道37,下水平滑道33的另一端与环形过渡道36的第一端相连,环形过渡道36的第二端与末端水平滑道37的一端相连。环形过渡道36设计主要是为了便于活动集门进行转向,从而进入至末端水平滑道37内,这种设计方式使得活动集门在两个平行的下水平滑道33与末端水平滑道37之间来回运动,活动集门被隐匿在斜向货物滑道9底部的闲余空间内,这种设计使得斗体1整体更加紧凑且空间利用率极高。
43.为了便于集门驱动电机41能够同步驱动至少一个的动力轮44进行旋转,进而驱动活动集门沿门体滑道3滑动,进一步地,集门驱动装置4包括含变速箱45的集门驱动电机41、齿轮组42及集门动力杆43,集门驱动电机41固定在斗体1的外侧壁上,集门驱动电机41通过齿轮组42驱动集门动力杆43的旋转,集门动力杆43的一端与齿轮组42的输出轮固定连接,至少一个的动力轮44固定在集门动力杆43上。具体使用时,集门驱动电机41旋转时驱动变速箱45进行变速,经变速箱45输出的动力传递给齿轮组42,进而带动集门动力杆43进行旋转,也即集门驱动电机41通过齿轮组42驱动集门动力杆43的旋转,集门动力杆43旋转时,会带动固定在其上的至少一个的动力轮44进行旋转。
44.为了对活动集门隐匿的极限位置进行限位,进一步地,本实施例中提供的智能货斗还包括第一微动开关5及底部连接板6,底部连接板6的两端分别固定在斗体1的第一侧板11与第二侧板12上,且位于斗体1的下部,底部连接板6位于末端水平滑道37的上方,第一微动开关5固定在底部连接板6上,且靠近末端水平滑道37的另一端。底部连接板6的两端分别固定在斗体1的第一侧板11与第二侧板12上,故底部连接板6本身组成与第一侧板11与第二侧板12组成框体,增强斗体1的结构强度的效果。同时底部连接板6提供了一个合适的安装位,使得第一微动开关5靠近末端水平滑道37的另一端,当活动集门处于隐匿状态,并运动至末端水平滑道37的另一端的极限位置时,会触动第一微动开关5,第一微动开关5发出反馈信号使得集门驱动电机41停止转动,当然完成上述动作还需要与自动售货机的控制主板或控制器配合。
45.为了对活动集门包覆的极限位置进行限位,进一步地,本实施例中提供的智能货斗还包括第二微动开关7及连接槽8,连接槽8的两端固定在斗体1的第一侧板11与第二侧板12上,且位于斗体1的上部,连接槽8位于上水平滑道31的端部,第二微动开关7固定在连接槽8上,且靠近上水平滑道31的另一端。同理,连接槽8的两端固定在斗体1的第一侧板11与第二侧板12上,同样连接槽8本身能够与第一侧板11与第二侧板12组成框体,增强斗体1的结构强度的效果,同时连接槽8提供了一个合适的安装位,使得第二微动开关7靠近靠近上水平滑道31的另一端,当活动集门处于全包覆状态,并运动至上水平滑道31的另一端的极限位置时,会触动第二微动开关7,第二微动开关7发出反馈信号使得集门驱动电机41停止转动。
46.为了便于进入斗体1的货品尽量靠近前门40,进一步地,斗体1的第一侧板11与第二侧板12之间设置有斜向货物滑道9,斜向货物滑道9的进货端设置有辅助货物进入货斗的
驱动辊91。当从货道300进入斗体1的货物入口的货品遇到驱动辊91后,驱动辊91仅驱动货品进入斜向货物滑道9,货品进入斜向货物滑道9后,会在其自身重力的分力作用下,滑动斗体1的前门40,以便用户从前门40取货。
47.为了使得从货道300进入斗体1的货物入口的货品不被卡住,进一步地,驱动辊91包括第一驱动辊911及第二驱动辊912,第二驱动辊912的第一端通过第一辊连接板913与第一驱动辊911的第一端相连,连接方式优选为铰接,第二驱动辊912的第二端通过第二辊连接板914与第一驱动辊911的第一端相连,连接方式优选为铰接,由于第二驱动辊912的两端都通过连接板与第一驱动辊911铰接,故第二驱动辊912可相对第一驱动辊911进行摆动,此外在铰接处设置复位弹簧,会使得货品接触第二驱动辊912时,第二驱动辊912是适当压低而使得货品在货道300推力的作用下,货品能够无缝运送至第二驱动辊912上,此时在第一驱动辊911及第二驱动辊912的同时驱动下,货品进入至斜向货物滑道9内。进一步优选地,第一驱动辊911的第二端设置有第一辊齿轮915,第二驱动辊912的第二端设置有第二辊齿轮916,第一辊齿轮915与第二辊齿轮916相啮合,第一驱动辊911旋转时会带动第二辊齿轮916进行旋转。进一步优选地,本实施例中提供的智能货斗还包括位于第一侧板11外侧壁上的辊驱动电机917,辊驱动电机917的动力输出端与第一驱动辊911相连,辊驱动电机917旋转时会驱动第一驱动辊911进行旋转,第一驱动辊911旋转后又会带动第二辊齿轮916进行旋转,从而使得第一驱动辊911及第二驱动辊912均旋转,使得从货道300进入斗体1的货物入口的货品不被卡住。进一步优选地,第一辊连接板913通过辊连接底板918与第二辊连接板914相连,辊连接底板918使得第一辊连接板913、辊连接底板918以及第二辊连接板914三者连为一个整体,第一驱动辊911及第二驱动辊912位于辊连接底板918的上方,辊连接底板918的底部设置有第三微动开关10。当有货品移动到第二辊齿轮916,在货品重力的作用下会压低第二辊齿轮916,第二辊齿轮916压低时会带动与之相连的构成整体第一辊连接板913、辊连接底板918以及第二辊连接板914进行压低,进而辊连接底板918就会触碰到第三微动开关10。故当有货品经过第一驱动辊911及第二驱动辊912时,第三微动开关10可检测到货品的存在或者反馈第二驱动辊912的工作状态,供自动售货机的控制主板或控制器决策用。
48.为了检测从货道300进入斗体1的货物入口的货品情况,进一步地,靠近竖向滑道32的第一侧板11与第二侧板12上设置有竖向电眼阵列20和/或斜向货物滑道9的两侧设置有斜向电眼阵列30,其中,竖向电眼阵列20由一排竖向分布的多个电眼组成,第一侧板11与第二侧板12的侧边缘处分别为竖向电眼阵列20的一排发射端及一排接收端,斜向电眼阵列30由一排斜向分布的多个电眼组成,其斜向方向与斜向货物滑道9的延伸方向一致,同样由一排发射端及一排接收端组成,采用电眼检测的原因主要是灵敏度高且成本较低。
49.如图1、2、9至13,货斗对接装置包括寻址传感器50、送电总成60、寻址支架70以及位移驱动器80,寻址传感器50及送电总成60均位于斗体1的货物入口处,位移驱动器80及寻址支架70均位于斗体1内,位移驱动器80通过寻址支架70驱动寻址传感器50及送电总成60沿斗体1的一侧壁移动,当寻址传感器50找到相应的货道300后,送电总成60将货道300的输送开关触点导通。
50.本实施例中提供的货斗对接装置包括斗体1,寻址传感器50用于找寻货道300,送电总成60用于控制货道300的输送开关触点的通断,寻址支架70用于固定寻址传感器50及
送电总成60,位移驱动器80用于驱动寻址支架70进行横向移动,寻址传感器50及送电总成60均位于斗体1的货物入口处,位移驱动器80及寻址支架70均位于斗体1内,寻址传感器50及送电总成60优选地固定在寻址支架70上,位移驱动器80通过寻址支架70驱动寻址传感器50及送电总成60沿斗体1的一侧壁移动,也即斗体1的货物入口的横向移动,当寻址传感器50找到相应的货道300后,送电总成60将货道300的输送开关触点导通,以打开货道300的输送开关对货道300进行供电,货道300启动沿货道300的延伸方向输送货品。具体使用时,位移驱动器80驱动寻址传感器50在斗体1的货物入口的横向横向移动,从而精准找寻到货道300的位置,寻址传感器50优选配置为具有较高灵敏度的光电传感器,当其检测到货道300后,会实时反馈信号至斗体1的控制器调整寻址传感器50的位置,使得斗体1的货物入口正对货道300的末端,也即货道300的出口处,这样从货道300导出的货品就会准确的落入至斗体1中。当货道300与斗体1的货物入口对准后,传统方法是发送控制信号至货道300,使得货道300进行货品输送至货斗1内,但控制信号可能出现延时或者错误等情况,这时就容易导致货品输送至斗体1的货物入口处时,货道300与斗体1不一定处于对准状态,二者无法完全对准极其容易导致货品不能进入货斗的货物入口或者货品卡在货斗与货道300之间导致货品损毁或者斗体1已经离开了货道300还继续工作一段时间,从而导致不属于某次购物活动的货品落入至斗体1内,为此本申请设置了送电总成60,送电总成60具有将货道300的输送开关触点导通或者断开的功能,只有当货道300与斗体1的货物入口对准后,斗体1的送电总成60才会将货道300的输送开关打开,此时货道300才能输送货品,当斗体1离开后,自然送电总成60也会被断开,这样就有效保证了仅有在货道300与斗体1的货物入口对准后,货道300才会进行货品输送,保证货道300输送的货品能够准确落入至斗体1内。此时,斗体1相当于一个能够准确打开货道300的输送开关的机器人。
51.为了使得旋转导片603上的触片031能够对准货道300的输送开关,进一步地,送电总成60包括滑动架601、导向杆602、旋转导片603以及旋转驱动器604,滑动架601的上端通过第一轴套605与导向杆602滑动配合,旋转导片603的一端套接在导向杆602上,且旋转导片603的一端包裹在滑动架601上端的两侧壁处,也即包裹滑动架601的上端端部,旋转导片603的一端可沿导向杆602滑动,旋转驱动器604的动力输出端与导向杆602的一端相连,旋转驱动器604的驱动导向杆602旋转时带动旋转导片603旋转,使得旋转导片603上的触片031与输送开关触点相接触。进一步优选地,滑动架601的下端通过第二轴套606套接在集门动力杆43上,滑动架601的下端与集门动力杆43滑动配合。具体使用时,滑动架601的上端及下端分别为上叉板及下叉板,分别插接在第一轴套605及第二轴套606上,第一轴套605及第二轴套606可分别相对于导向杆602与集门动力杆43滑动配合,从而使得滑动架601可沿着导向杆602和/或集门动力杆43横向移动,当导向杆602和/或集门动力杆43旋转时,滑动架601不会跟随上述二杆旋转,也就是说,第一轴套605及第二轴套606可沿着导向杆602及集门动力杆43这二杆长度方向横向移动,但并非与导向杆602及集门动力杆43固定连接,因此不会跟随二杆的转动而转动。因此,滑动架601主要作用是带动旋转导片603沿二杆长度方向横向移动,这是由于旋转导片603的一端包裹在滑动架601上端的两侧壁处,这就导致滑动架601移动时会带动旋转导片603进行移动,而旋转导片603的一端套接在导向杆602上,其可在导向杆602设置滑槽,相应的旋转导片603与导向杆602套接处的旋转导片603的一端设置有滑块,使得导向杆602转动时,由于旋转导片603与导向杆602相对周向运动被约束,
故旋转导片603也会跟随导向杆602进行旋转,但旋转导片603又没有与导向杆602固定连接,依然可以沿着导向杆602进行横向移动。旋转导片603的另一端为自由端,另一端设置有触片031,当旋转导片603相对滑动架601旋转后使得触片031与货道300的输送开关触点相接触,从而使得货道300的输送开关被导通以输送货品。
52.为了同时驱动寻址传感器50及送电总成60沿着导向杆602进行横向移动进一步地,寻址支架70包括主支撑板701及侧支撑板702,送电总成60固定在主支撑板701上,侧支撑板702的一侧边与主支撑板701的一侧边相连,寻址传感器50固定在侧支撑板702上。侧支撑板702的设置主要为了合理调整寻址传感器50及送电总成60的位置关系,使得寻址传感器50位于送电总成60的一侧。由于寻址传感器50及送电总成60分别固定在侧支撑板702及主支撑板701上,侧支撑板702及主支撑板701二者也固定连接,因此,当寻址支架70进行往返位移时,会带动寻址传感器50及送电总成60进行横向移动。
53.为了合理确定寻址传感器50及送电总成60横向移动的移动范围,进一步地,斗体1包括第一侧板11与第二侧板12,第一侧板11上设置有第一类接近传感器901,第二侧板12上设置有第二类接近传感器902,主支撑板701的两侧分别设置有与第一类接近传感器901、第二类接近传感器902相适配的第一耳板011及第二耳板012。当寻址支架70的第一耳板011靠近第一侧板11时,第一耳板011会插入至安装有第一类接近传感器901的插槽内,此时第一类接近传感器901获知寻址支架70已运动至第一侧板11附近,则通过斗体1的控制器发送控制信号至位移驱动器80,位移驱动器80停止驱动寻址支架70,使得寻址支架70不再继续靠近第一侧板11,放置寻址支架70撞向第一侧板11;同理,当寻址支架70的第二耳板012靠近第一侧板11时,同样具有防撞效果。
54.为了便于位移驱动器80驱动寻址支架70进行横向移动,进一步地,寻址支架70还包括动力连接板703,位移驱动器80包括位移驱动电机801、第一链轮802、第一传送带803及第二链轮804,位移驱动电机801的动力输出端固定有第一链轮802,第一传送带803的一端套设在第一链轮802上,第一传送带803的另一端套设在第二链轮804上,动力连接板703固定在第一传送带803上。具体使用时,由于第一链轮802、第一传送带803及第二链轮804组成类似输送带结构,当位移驱动电机801驱动第一链轮802旋转时,会带动第一传送带803的两个带面进行水平移动,又因动力连接板703与第一传送带803的一个带面固定连接,故第一传送带803移动时,会带动动力连接板703进行横向运动,动力连接板703属于寻址支架70的一部分,动力连接板703的一侧边与主支撑板701的上侧边固定连接,进而驱动寻址支架70进行横向移动。进一步优选地,位移驱动器80还包括辊支架805,第二链轮804的两端与辊支架805相铰接,第二链轮804可相对于辊支架805旋转。
55.为了便于位移驱动电机801及辊支架805的固定,进一步地,底部连接板6的两端固定在斗体1的第一侧板11与第二侧板12上,且位于斗体1的下部,位移驱动电机801固定在底部连接板6上,第二链轮804通过辊支架805固定在底部连接板6上,从而实现位移驱动电机801及辊支架805的固定。
56.为了便于对导向杆602进行旋转驱动,进一步地,旋转驱动器604包括旋转驱动电机041、主动齿轮042及从动齿轮043,主动齿轮042固定在旋转驱动电机041的动力输出端,从动齿轮043固定在导向杆602的一端,主动齿轮042与从动齿轮043相啮合,主动齿轮042与从动齿轮043相互垂直,旋转驱动电机041旋转时会带动主动齿轮042旋转,从动齿轮043带
动与之相连的导向杆602进行旋转,导向杆602会带动旋转导片603进行旋转以触动货道300的输送开关。进一步优选地,集门驱动装置4驱动活动集门沿门体滑道3往复运动,寻址传感器50及送电总成60均位于活动集门的内侧,当活动集门打开后,寻址传感器50及送电总成60进入工作状态,当活动集门关闭后,寻址传感器50及送电总成60暂停工作,由于送电总成60不工作,货道300就无法输送货品,故与活动集门形成了二层保护,活动集门能够物理隔绝通过货斗1拿去货品的行为,而送电总成60则保证了只有当货斗1处于工作状态时并且实现对准后,才能实现货品输送,也即取货操作。
57.斜向货物滑道9位于斗体1的第一侧板11与第二侧板12之间斜向货物滑道9,斜向货物滑道9的进货端设置有驱动辊91。斜向货物滑道9的取货端设置有前门40,前门40位于斗体1前端的取货出口处,前门40在前门驱动器90驱动作用下沿取货出口的竖直方向上下运动,以使得取货出口打开或关闭。
58.为了驱动前门40沿取货出口的竖直方向上下运动,进一步地,前门驱动器90包括门滑轨903、门滑块904、门连接板905以及竖向位移器906,门连接板905包括驱动连接板051、中间固定板052以及门体固定板053,门体固定板053固定在前门40的内侧壁上,门体固定板053的主平面与前门40的主平面平行,也即前门40的侧边缘安装在门体固定板053上。门滑轨903固定在第一侧板11的边缘处,并沿第一侧板11的长度方向延伸,也即斗体1的高度方向,门滑块904与门滑轨903滑动配合,中间固定板052固定在门滑块904上,竖向位移器906则与驱动连接板051固定连接,驱动连接板051通过中间固定板052与门体固定板053固定连接。具体工作时,由于驱动连接板051、中间固定板052以及门体固定板053均为同一块板,即门连接板905,当竖向位移器906驱动驱动连接板051沿着第一侧板11的长度方向上下运动时,中间固定板052以及门体固定板053也会跟随驱动连接板051进行上下运动,中间固定板052固定在门滑块904上,故也会带动门滑块904沿门滑轨903进行上下运动,门滑轨903具有一定的宽度,其与门滑块904滑动配合时具有导向以及限位的作用,使得前门40上下运动过程中更加平稳,中间固定板052与门体固定板053固定连接,门体固定板053固定在前门40的内侧壁上,因而前门40也会平稳的上下运动。
59.为了对前门40上下运动的极限位置进行限位,进一步地,门滑轨903的一侧设置有与驱动连接板051配合使用的第四微动开关054及第五微动开关055,第四微动开关054通过第一开关支架056与第一侧板11的侧壁上部固定连接,第五微动开关055通过第二开关支架057与第一侧板11的侧壁下部固定连接。当前门40向上运动到前门40完全打开时,也即斗体1上部的极限位置时,驱动连接板051会触碰到第四微动开关054,从而使得斗体1的控制器控制竖向位移器906停止转动,前门40停止继续向上移动。同理,当前门40向下运动到前门40完全关闭时,会触碰到第五微动开关055使得前门40停止继续向下移动。
60.为了便于驱动驱动连接板051进行上下运动,进一步地,竖向位移器906包括门驱动电机061、第三链轮062、第二传送带063及第四链轮064,门驱动电机061的动力输出端固定有第三链轮062,第二传送带063的一端套设在第三链轮062上,第二传送带063的另一端套设在第四链轮064上,驱动连接板051固定在第二传送带063上。具体使用时,门驱动电机061旋转时,驱动第三链轮062进行旋转,第三链轮062时通过第二传送带063带动第四链轮064进行旋转,此时由于驱动连接板051固定在第二传送带063上,故带动驱动连接板051进行上下运动,此时第四链轮064主要起到限位作用,驱动连接板051的上下运动的方向与门
滑轨903的长度方向一致,保证前门40上下运动的稳定性。
61.实施例二
62.本实施例中提供的一种自动售货机,用于上述的智能货斗,包括货道300、斗体1、货斗对接装置及隔离集门装置,隔离集门装置包覆在斗体1的右侧壁及一部分顶壁上,货斗对接装置位于斗体1内,当隔离集门装置的活动集门被打开后,货斗对接装置中的寻址传感器50及送电总成60沿斗体1的一侧壁移动,当寻址传感器50通过货道300上标记或者应答器找到相应的货道300后,送电总成60将货道300的输送开关触点进行电导通。由此可见,本申请提供的自动售货机能够自动找寻货道300,当找到货道300后,又能够激活货道300,这种方式能够有效避免控制误差导致货品有时会出现在货斗与货道没有对准的情况下输送货品,导致货品未进入货斗的货物入口或者货品卡在货斗与货道之间导致货品损毁,采用本申请提供的智能货斗既能够有效防止货品被盗及售货机内外环境的隔离,又能够确保合适的货品落入至合适的斗体中,具有双保险作用。由于自动售货机通常设置有多层货物,斗体1往往需要上下运动至不同层的货道300进行对接并取相应的货品,此时需要对斗体1极限位置进行限位。斗体1的第二侧板12的上部设置有上止点微动开关100,第二侧板12的下部设置有下止点微动开关200。上止点微动开关100及下止点微动开关200能够对自动售货机上下运动的极限位置进行限位,保证斗体1沿自动售货机上下运动安全性。
63.本发明是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本发明不受此处所公开的具体实施例的限制,其他落入本申请的权利要求内的实施例都属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1