一种车辆驱动轴的识别方法与流程
1.本发明属于车辆识别技术领域,具体涉及一种车辆驱动轴特别是货车驱动轴的识别方法。
背景技术:
2.高速公路入口治超工作是当前公路运营管理的重要组成部分。传统的业务流程是收费员观察车辆的轴型,核对车辆的行驶证内容,确定该车准载质量,然后与称重数据进行对比,如果未超载则允许驶入高速公路,反之对其劝返。该工作严重依赖操作人员的经验和责任心,尤其是无法离开人工识别,无法实现无人值守的入口管理工作。
3.解决目前公路治超的方法是通过轴型(轴数、单双胎、驱动轴)确定限重标准。最新的公路货运车辆超限超载认定标准,统一车货总重限值认定标准,首次提出了以单驱动和双驱动的限重标准“即六轴及六轴以上汽车列车,其车货总质量超过49000千克,其中牵引车驱动轴为单轴的,其车货总质量超过46000千克”。
4.因此,通过设备自动识别车辆驱动轴是发展方向。
5.目前识别驱动轴的识别主要通过以下几种方法:1、石英敏感单元技术方案,通过监测到水平摩擦力的大小和方向,从而通过监测到的摩擦力大小和方向,有效识别到车轮类型,判断出是单轴驱动还是多轴驱动,如专利申请号为201710103050. 6所公开的技术方案。
6.2、摄像头技术方案,通过扫描得到车底的图像,然后通过模型判断单双轴驱动信息,如专利申请号为201910116104.1所公开的技术方案。
7.3、激光扫描模块技术方案,预埋在车道中央,根据驱动轴和非驱动轴外形的不同判断驱动轴,如专利申请号为201721243476.3和201711396326 .0所公开的技术方案。
8.上述的方案中,均需要在路面上埋设布置精密传感器,设备造价和安装成本较高;同时采用摄像头和激光扫描模块的方案在道路环境恶劣时会影响识别效率。
技术实现要素:
9.本发明要解决的技术问题是提供一种车辆驱动轴的识别方法,通过地感线圈采集的振荡频率变化数据、激光雷达装置得到的扫描数据对车轴信息和轮胎类型信息,并对车轴处的振荡频率变化数据比较从而识别出驱动轴。
10.为解决上述技术问题,本发明采用的技术方案是:一种车辆驱动轴的识别方法,包括以下步骤:步骤a、控制主机控制激光雷达装置扫描车辆的侧面轮廓得到扫描数据、控制地感线圈采集车辆的底盘结构特性得到振荡频率变化数据;步骤b、根据扫描数据得到所扫描车辆的车轴信息和轮胎类型信息;步骤c、根据得到的车轴信息和轮胎类型信息在振荡频率变化数据中获取对应的振荡频率变化数值并进行比较,判断所述车轴是否为驱动轴,
或者根据采集到的车轴信息、轮胎类型信息以及振荡频率变化数据与经验数据库中的典型数据进行比较、分析,判断车轴是否为驱动轴。
11.进一步的,在步骤a中频率计数器采集与地感线圈相连的振荡器的振荡频率值并传输给控制主机。
12.进一步的,在步骤b中车轴信息包括车轴的数量,轮胎类型信息包括单胎和双胎。
13.进一步的,在步骤c中根据得到的车轴信息和轮胎类型信息得到车轴信息中处于第2轴至第4轴且在轮胎类型信息中为双胎的目标车轴,然后在振荡频率变化数据中获取目标车轴对应的振荡频率变化数值并进行比较,判断所述目标车轴是否为驱动轴。
14.进一步的,在步骤c中根据得到的车轴信息和轮胎类型信息得到车轴信息中轮胎类型信息中为双胎的目标车轴,然后将振荡频率变化数据生成感应曲线,根据所有目标车轴在感应曲线中对应位置的曲率判断所述目标车轴是否为驱动轴。
15.进一步的,将振荡频率变化数据生成感应曲线,计算所有目标车轴在感应曲线中对应位置的目标曲率以及所有目标曲率的平均曲率,比较目标曲率与平均曲率判断所述目标车轴是否为驱动轴。
16.进一步的,步骤c中的经验数据库中的典型数据包括典型车轴信息、典型轮胎类型信息和典型感应曲线。
17.进一步的,所述激光雷达装置发出的扫描线垂直于车道且与地感线圈的中心轴线相重合。
18.进一步的,所述地感线圈设置的匝数为12-14。
19.进一步的,所述地感线圈设置在底盘识别器中。
20.本发明的原理如下:车辆进入收费车道时,激光雷达和地感线圈分别对车侧和车底进行扫描,即:激光雷达对车辆外形进行扫描,待车辆完全通过后,其三维轮廓模型已经完整获取;地面上的电磁感应线圈对通过其上方的车轴进行同步测量,由于驱动轴结构和普通随动轴有较大区别:驱动轴包括差速器等尺寸加大的金属部件,离地高度也较小,能够对电磁感应振荡回路有较大的影响,反之,普通随动轴结构简单,金属部件体积较小,对电磁感应振荡回路的频率影响较小,通过计数器对频率进行测量,可以分辨轴的类型。控制主机对激光雷达三维模型中轮胎进行定位、计数、单双胎识别,再通过双胎轴的振荡频率变化数值得到驱动轴的数量和位置,最后通过进行信息的综合分析,将轴数、单双胎、轴距、驱动轴形态等信息进行汇总,可以获知准确的车辆驱动轴及各种轴型信息。
21.本发明的有益技术效果是:借助于激光雷达装置和地感线圈,通过将车辆的轮廓与车底的感应变化数据相配合,可以快速、准确的实现驱动轴数量和位置的识别,可以将该轴型信息查询国家法定的车辆准载标准,获知该车辆的核定准载质量,实现了无人化全自动的治超管理;使用线圈检测驱动轴形态成本较低,寿命长,维护量小,能够全天候工作不受光线、雨水、灰尘和油污的影响。
22.下面结合附图对本发明进行详细说明。
附图说明
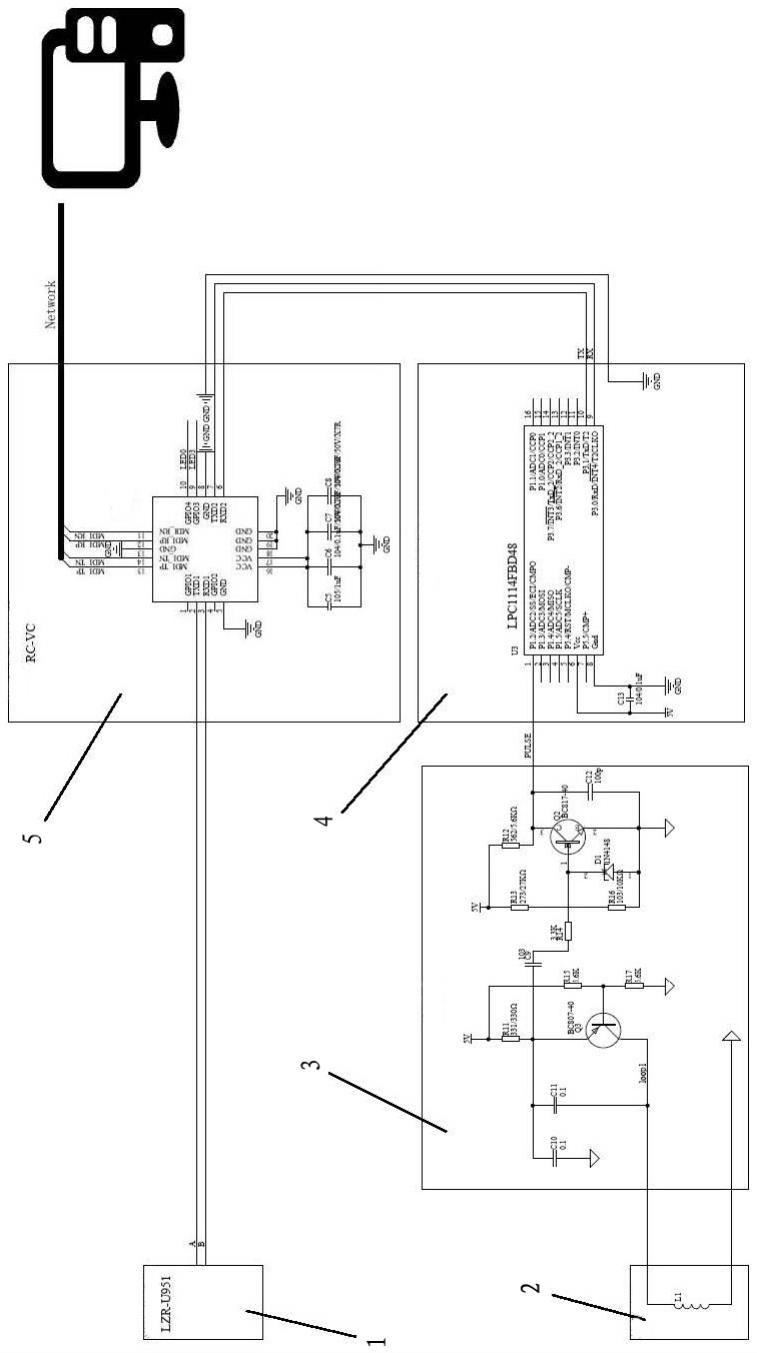
23.图1是本发明车辆驱动轴识别系统的控制原理图;图2是本发明车辆驱动轴识别系统中地感线圈在底盘识别器中的安装示意图;
图3是本发明车辆驱动轴识别系统中地感线圈和激光雷达装置的布置图;图4是本发明车辆驱动轴的识别方法中单驱动轴的感应曲线以及对应的车辆轮廓;图5是本发明车辆驱动轴的识别方法中双驱动轴的感应曲线以及对应的车辆轮廓。
24.在附图中:1是激光雷达装置,2是地感线圈,3是振荡器,4是频率计数器,5是控制主机,6是底盘识别器。
具体实施方式
25.参见附图1,本发明的方法基于车辆驱动轴识别系统,其包括设置在道路中央的地感线圈2、设置在道路一侧的激光雷达装置1以及配套的控制主机5。其中,地感线圈2与振荡器3相连,振荡器3与频率计数器4相连,频率计数器4 的输出端与控制主机5相连。
26.参见附图2,上述的地感线圈2设置在底盘识别器6中,设置的匝数优选为12-14。通过地感线圈2采集车底金属特性的数据,可以不受暗光线、雨水、灰尘和油污等恶劣环境的影响,同时具有成本低、寿命长,维护量小的优点。具体实施时,对路面的一部分进行切割,然后将底盘识别器6放入后对切割的路面进行修复。
27.参见附图3,上述激光雷达装置1发出的扫描线垂直于车道且与地感线圈2的中心轴线相重合,以实现两者的同步数据采集动作,利于后期数据查找和比较。
28.本发明采用一台单线扫描激光雷达,垂直方向对车辆进行扫描。在车辆通过的过程中,对车辆的侧面进行完整的扫描,获取车辆侧面的三维模型。通过对该模型进行分析,定位其每个轮胎的位置、单双胎形态、轮胎之间的距离等等信息,可以准确获知轴数、除驱动轴信息之外的轴型信息。
29.上述的地感线圈2可以设置一组或多组,其设置于车道路面上,位于车道中心附近位置。在有车辆经过时,线圈配套的lc振荡器产生数十千hz的电磁振荡。后端电路检测该振荡回路的频率。该频率受感应线圈外部环境金属物体的影响而变化,一般说来,外部金属物体靠近该线圈时,其电磁振荡能量将会被金属吸收一部分,振荡频率将会升高。其变化量与金属物体的性质、大小和距离相关。后端计数器探测该频率的变化量,可以判断靠近的金属物体的大小或者距离,从而为驱动轴的判断提供依据。
30.参见附图4和5,基于上述的系统,本发明的车辆驱动轴的识别方法包括以下步骤。
31.步骤a、控制主机5通过激光雷达装置1扫描车辆的侧面轮廓得到扫描数据、通过地感线圈2采集车辆的底盘结构特性得到振荡频率变化数据。激光雷达装置1和地感线圈2对于同一车辆数据的采集是同时进行的,以便于当控制主机5识别出扫描数据中的目标车轴时找到振荡频率变化数据中的相关数据。激光雷达装置1的扫描是连续的,一旦有车辆到来即开始扫描车辆轮廓信息。地感线圈2检测到的底盘金属信息,通过振荡器3、频率计数器4将振荡频率值传输给控制主机5。
32.步骤b、根据扫描数据得到所扫描车辆的车轴信息和轮胎类型信息。通过激光雷达装置1得到的车辆侧轮廓的扫描数据,经过分析可以得到车轴信息和轮胎类型信息。车轴信息包括车轴的数量和位置,轮胎类型信息包括单胎和双胎。
33.步骤c、根据得到的车轴信息和轮胎类型信息在振荡频率变化数据中获取对应的
振荡频率变化数值并进行比较,判断所述车轴是否为驱动轴。具体为,当车轴为驱动轴时,差速器的桥壳要比非驱动轴的位置要低,其离地感线圈2更近,振荡频率变化数值要更高,由此得到其为驱动轴。
34.进一步的,无论车辆的车轴有多少个,从车头位置的车轴开始计数,其驱动轴均位于第2轴至第4轴之间的一个或两个。因此,在本步骤中可以根据得到的车轴信息和轮胎类型信息得到车轴信息中处于第2轴至第4轴且在轮胎类型信息中为双胎的目标车轴,然后在振荡频率变化数据中获取目标车轴对应的振荡频率变化数值并进行比较,判断所述目标车轴是否为驱动轴,从而可以更快的识别出驱动轴。
35.进一步的,上述步骤中还可以将振荡频率变化数据生成感应曲线,根据所有目标车轴在感应曲线中对应位置的曲率判断所述目标车轴是否为驱动轴。驱动轴处的曲率要明显比非驱动轴的曲率要大,如图3和图4所示。还可以将振荡频率变化数据生成感应曲线,计算所有目标车轴在感应曲线中对应位置的目标曲率以及所有目标曲率的平均曲率,比较目标曲率与平均曲率判断所述目标车轴是否为驱动轴。
36.只要步骤b中控制主机5在实时的扫描数据中检测到车轴信息和轮胎信息则可以进入步骤c在实时的振荡频率变化数据找到对应的振荡频率变化数值。然后将第2轴至第4轴的符合条件的车轴对应的振荡频率变化数值进行比较,即可识别出驱动轴和非驱动轴。上述的对应的振荡频率变化数值是振荡频率变化数据中相关车轴处振荡频率的最大值,也可以是最大值处左右一定数据的平均值。
37.步骤c还可以是根据采集到的车轴信息、轮胎类型信息以及振荡频率变化数据与经验数据库中的典型数据进行比较、分析,判断车轴是否为驱动轴。经验数据库中的典型数据包括典型车轴信息、典型轮胎类型信息和典型感应曲线。典型感应曲线中有驱动轴和非驱动轴的信息。
38.进行驱动轴识别时:首先,根据采集到的车轴信息和轮胎类型信息调出经验数据库中满足要求的典型感应曲线。
39.然后将采集到的振荡频率变化数据生成感应曲线,与经验数据库中的典型感应曲线进行比对,得到相似度阈值最高的典型感应曲线,从得到的典型感应曲线得到驱动轴。
40.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1