控制方法及其对应的车辆、电子设备、存储介质与流程
本发明涉及车辆,尤其涉及一种控制方法及其对应的车辆、电子设备、存储介质。
背景技术:
1、目前,通过共享车辆(例如共享单车、共享电动车等)出行已经成为城市中新兴的出行方式,可以有效解决城市人群的出行需求。但是,随着共享车辆的大量投放使用、随意停放甚至占用机动车道,给城市管理和交通安全带来挑战和隐患。
2、现有技术中,通常是通过固定停车桩、gps(global positioning system,全球定位系统)电子围栏或通过蓝牙道钉等方式来引导有序、规范地定点还车。但是,固定停车桩的施工难度较大、成本高,且占用一定的空间,难以普遍推广。gps定位容易受到干扰,精度较低,导致用户还车困难,影响用户体验。蓝牙道钉定位计算方式较为复杂,定位所需要的时间较长,影响用户体验。
技术实现思路
1、有鉴于此,本发明实施例的目的在于提供一种控制方法及其对应的车辆、电子设备、存储介质,可以实现快速精准的定位,提升用户体验,降低成本和施工难度。
2、第一方面,本发明实施例提供了一种车辆的控制方法,适用于车辆,所述方法包括:
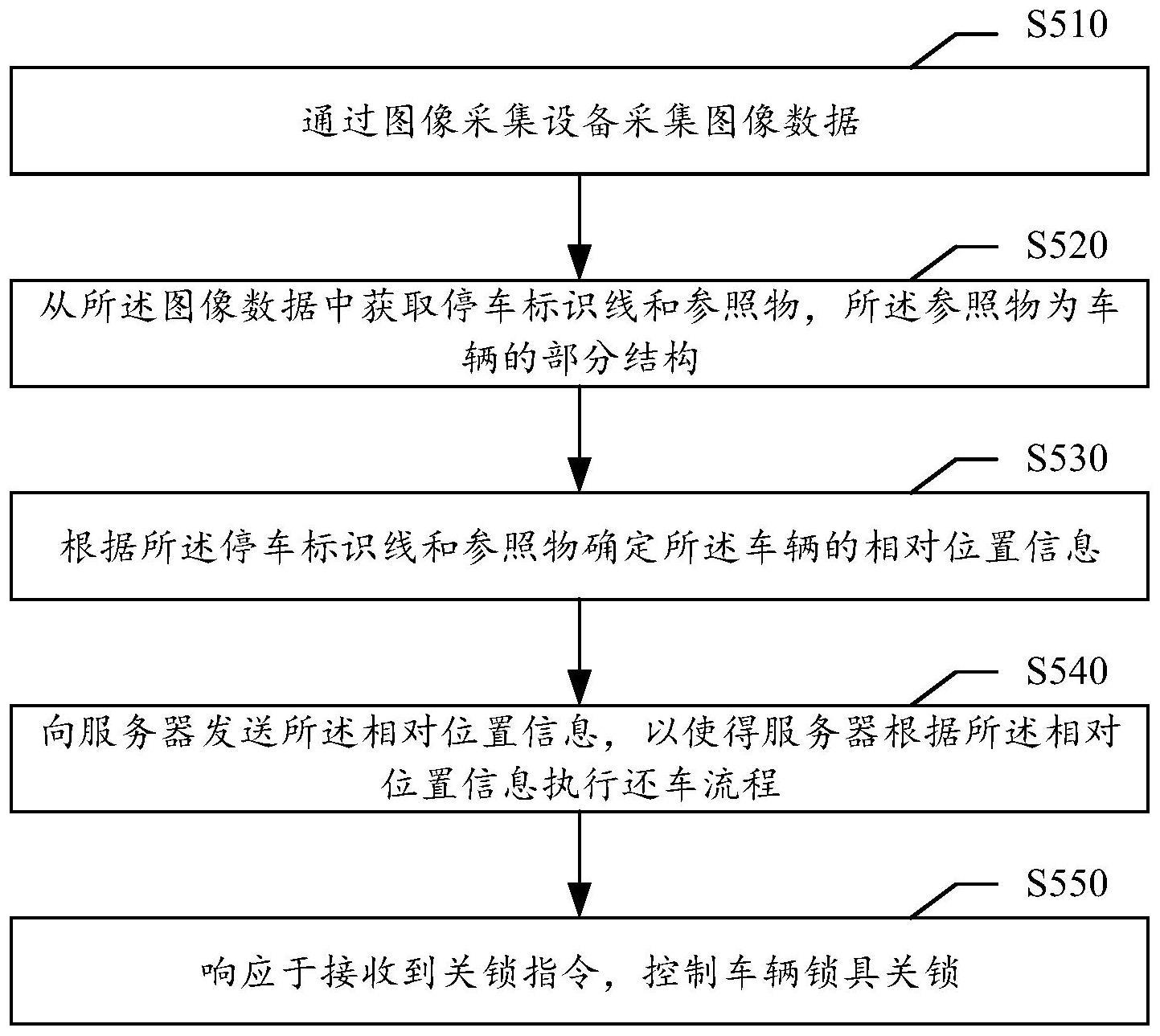
3、通过图像采集设备采集图像数据;
4、从所述图像数据中获取停车标识线和参照物,所述参照物为车辆的部分结构;
5、根据所述停车标识线和参照物确定所述车辆的相对位置信息,所述相对位置信息包括夹角信息和距离信息中的至少一种,所述夹角信息用于表征所述车辆与所述停车标识线的夹角关系,所述距离信息用于表征所述车辆与所述停车标识线的距离关系;
6、向服务器发送所述相对位置信息,以使得服务器根据所述相对位置信息执行还车流程;以及
7、响应于接收到关锁指令,控制车辆锁具关锁。
8、在一些实施例中,所述通过图像采集设备采集图像数据具体为:
9、响应于接收到查询指令,控制所述图像采集设备进入工作状态,并采集所述图像数据;
10、其中,所述图像采集设备安装在车辆的预定位置,且安装方向被配置为在所述车辆的停车位置满足一定条件时,采集到的图像数据包括停车标识线和参照物。
11、在一些实施例中,所述从所述图像数据中获取停车标识线和参照物包括:
12、基于边缘检测算法从所述图像数据中获取停车标识线;以及
13、基于预先训练的检测模型从所述图像数据中获取参照物。
14、在一些实施例中,所述夹角信息为角度值和/或角度值对应的分类等级,所述距离信息为距离值和/或距离值对应的分类等级。
15、在一些实施例中,所述夹角信息为所述图像数据中停车标识线的倾角。
16、在一些实施例中,所述夹角信息为所述车辆与停车标识线的夹角。
17、在一些实施例中,所述夹角信息通过如步骤获取:
18、确定所述停车标识线的倾角;
19、确定所述参照物的偏向角,所述参照物的偏向角用于表征所述图像数据中参照物的倾角;以及
20、根据所述停车标识线的倾角和参照物的偏向角确定所述车辆与停车标识线的夹角。
21、在一些实施例中,所述停车标识线的倾角通过如步骤获取:
22、确定所述停车标识线的第一边缘对应的第一倾角;
23、确定所述停车标识线的第二边缘对应的第二倾角;以及
24、根据所述第一倾角和所述第二倾角确定所述停车标识线的倾角,所述停车标识线的倾角为所述第一倾角或第二倾角或在第一倾角和第二倾角之间的倾角。
25、在一些实施例中,所述角度值对应的分类等级包括第一角度等级、第二角度等级和第三角度等级;
26、其中,所述第一角度等级用于表征车辆正向停车,所述第二角度等级用于表征车辆斜向停车,所述第三角度等级用于表征车辆反向停车。
27、在一些实施例中,所述距离值对应的分类等级包括第一距离等级和第二距离等级;
28、其中,所述第一距离等级用于表征车辆在所述停车区域内且距离所述停车标识线的距离小于第一距离阈值,第二距离等级用于表征车辆的一部分超出停车区域,且超出停车区域的距离小于第二距离阈值。
29、在一些实施例中,所述方法还包括:
30、响应于图像识别失败,向服务器发送识别失败信息;
31、其中,所述图像识别失败用于表征未识别到停车标识线或参照物,或者,获取到的相对位置信息的置信度小于置信度阈值。
32、在一些实施例中,所述方法还包括:
33、响应于还车流程被触发,向服务器发送定位信息和/或方位角,以使得服务器根据所述定位信息和/或方位角进行前置校验。
34、在一些实施例中,所述方法还包括:
35、向服务器发送关锁结果。
36、在一些实施例中,所述方法还包括:
37、响应于获取到所述车辆的相对位置信息,控制所述图像采集设备进入休眠状态。
38、在一些实施例中,所述方法还包括:
39、响应于关锁成功,控制所述图像采集设备停止工作。
40、第二方面,本发明实施例提供了一种车辆的控制方法,适用于服务器,所述方法包括:
41、向车辆发送查询指令,所述查询指令用于控制所述车辆的图像采集设备进入工作状态,以采集图像数据;
42、接收所述车辆的相对位置信息,所述相对位置信息包括夹角信息和距离信息中的至少一种,所述夹角信息用于表征所述车辆与停车标识线的夹角关系,所述距离信息用于表征所述车辆与所述停车标识线的距离关系;以及
43、响应于所述相对位置信息满足还车条件,向所述车辆发送关锁指令,以控制车辆锁具关锁。
44、在一些实施例中,所述方法还包括:
45、接收车辆发送的定位信息和/或方位角;以及
46、根据所述定位信息和/或方位角对所述车辆进行前置校验。
47、在一些实施例中,所述根据所述定位信息和/或方位角对所述车辆进行前置校验包括:
48、根据所述定位信息对所述车辆的位置进行校验;和/或
49、根据所述方位角对所述车辆的停车方向进行校验。
50、在一些实施例中,所述根据所述定位信息对所述车辆的位置进行校验包括:
51、响应于所述定位信息在停车区域内,表征前置校验通过。
52、在一些实施例中,所述根据所述方位角对所述车辆的停车方向进行校验包括:
53、获取预先设置的停车方向;
54、获取所述方位角与所述预先设置的停车方向的夹角;
55、响应于所述方位角与所述预先设置的停车方向的夹角满足预定条件,表征前置校验通过。
56、在一些实施例中,所述向车辆发送查询指令具体为:
57、响应于所述前置校验通过,向车辆发送查询指令。
58、在一些实施例中,所述夹角信息为角度值和/或角度值对应的分类等级,所述距离信息为距离值和/或距离值对应的分类等级。
59、在一些实施例中,所述角度值对应的分类等级包括第一角度等级、第二角度等级和第三角度等级;
60、其中,所述第一角度等级用于表征车辆正向停车,所述第二角度等级用于表征车辆斜向停车,所述第三角度等级用于表征车辆反向停车。
61、在一些实施例中,所述距离值对应的分类等级包括第一距离等级和第二距离等级;
62、其中,所述第一距离等级用于表征车辆在所述停车区域内且距离所述停车标识线的距离小于第一距离阈值,第二距离等级用于表征车辆的一部分超出停车区域,且超出停车区域的距离小于第二距离阈值。
63、在一些实施例中,所述响应于所述相对位置信息满足还车条件,向所述车辆发送关锁指令包括:
64、响应于所述相对位置信息满足还车条件,向用户终端发送还车确认请求;以及
65、响应于接收到所述用户终端发送的还车确认信息,向所述车辆发送关锁指令。
66、在一些实施例中,所述方法还包括:
67、接收车辆发送的关锁结果;以及
68、响应于所述关锁结果为关锁成功,向用户终端发送还车成功信息。
69、第三方面,本发明实施例提供了一种车辆,所述车辆包括:
70、车辆锁具;
71、图像采集设备,设置在所述车辆上,被配置为采集图像数据,从所述图像数据中获取停车标识线和参照物,所述参照物为车辆的部分结构,根据所述停车标识线和参照物确定所述车辆的相对位置信息,所述相对位置信息包括夹角信息和距离信息中的至少一种,所述夹角信息用于表征所述车辆与所述停车标识线的夹角关系,所述距离信息用于表征所述车辆与所述停车标识线的距离关系;以及
72、控制设备,与所述图像采集设备通信连接,被配置为向服务器发送所述相对位置信息,以使得服务器根据所述相对位置信息执行还车流程,响应于接收到关锁指令,控制所述车辆锁具关锁。
73、在一些实施例中,所述参照物为所述车辆的前挡泥板。
74、在一些实施例中,所述车辆还包括:
75、车篮,设置在所述车辆的前端;
76、其中,所述图像采集设备设置在所述车篮的底部,且安装方向被配置为在所述车辆的停车位置满足一定条件时,采集到的图像数据包括停车标识线和参照物。
77、在一些实施例中,所述控制设备被配置为响应于接收到查询指令,控制所述图像采集设备进入工作状态,并采集所述图像数据。
78、在一些实施例中,所述图像采集设备基于边缘检测算法从所述图像数据中获取停车标识线,基于预先训练的检测模型从所述图像数据中获取参照物。
79、在一些实施例中,所述夹角信息为角度值和/或角度值对应的分类等级,所述距离信息为距离值和/或距离值对应的分类等级。
80、在一些实施例中,所述夹角信息为所述图像数据中停车标识线的倾角。
81、在一些实施例中,所述夹角信息为所述车辆与停车标识线的夹角。
82、在一些实施例中,所述图像采集设备被配置为确定所述停车标识线的倾角,确定所述参照物的偏向角,所述参照物的偏向角用于表征所述图像数据中参照物的倾角,根据所述停车标识线的倾角和参照物的偏向角确定所述车辆与停车标识线的夹角。
83、在一些实施例中,所述图像采集设备被配置为确定所述停车标识线的第一边缘对应的第一倾角,确定所述停车标识线的第二边缘对应的第二倾角,根据所述第一倾角和所述第二倾角确定所述停车标识线的倾角,所述停车标识线的倾角为所述第一倾角或第二倾角或在第一倾角和第二倾角之间的倾角。
84、在一些实施例中,所述角度值对应的分类等级包括第一角度等级、第二角度等级和第三角度等级;
85、其中,所述第一角度等级用于表征车辆正向停车,所述第二角度等级用于表征车辆斜向停车,所述第三角度等级用于表征车辆反向停车。
86、在一些实施例中,所述距离值对应的分类等级包括第一距离等级和第二距离等级;
87、其中,所述第一距离等级用于表征车辆在所述停车区域内且距离所述停车标识线的距离小于第一距离阈值,第二距离等级用于表征车辆的一部分超出停车区域,且超出停车区域的距离小于第二距离阈值。
88、在一些实施例中,所述控制设备还被配置为响应于图像识别失败,向服务器发送识别失败信息;
89、其中,所述图像识别失败用于表征未识别到停车标识线或参照物,或者,获取到的相对位置信息的置信度小于置信度阈值。
90、在一些实施例中,所述控制设备还被配置为响应于还车流程被触发,向服务器发送定位信息和/或方位角。
91、在一些实施例中,所述控制设备还被配置为向服务器发送关锁结果。
92、在一些实施例中,所述控制设备还被配置为响应于获取到所述车辆的相对位置信息,控制所述图像采集设备进入休眠状态。
93、在一些实施例中,所述控制设备还被配置为响应于关锁成功,控制所述图像采集设备停止工作。
94、第四方面,本发明实施例提供了一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现如第一方面和第二方面所述的方法。
95、第五方面,本发明实施例提供了一种计算机可读存储介质,其上存储计算机程序指令,所述计算机程序指令在被处理器执行时实现如第一方面和第二方面所述的方法。
96、本发明实施例的技术方案通过图像采集设备采集图像数据,从图像数据中获取停车标识线和参照物,根据停车标识线和参照物确定车辆与停车标识线的夹角关系或距离关系等相对位置信息,并向服务器发送相对位置信息,以使得服务器根据相对位置信息确定是否可以还车。由此,只需在车辆上安装图像采集设备,即可根据图像数据获取到比较精确的车辆的位置和停车方向,不需要在停车点内设置额外的设备,即可实现快速精准的定位,提升用户体验,降低成本和施工难度。
- 还没有人留言评论。精彩留言会获得点赞!