一种风电全自主巡检系统及其方法与流程
本发明涉及风电运维,尤其涉及一种风电全自主巡检系统及其方法。
背景技术:
1、现有的风电运维行业,传统的风机叶片巡检主要依赖人工配合吊篮或者高倍望远镜,用肉眼识别叶片上的裂缝或鼓包,该方别准确率较低,耗时长。随着时代的发展,开始采用无人机自主导航的风机叶片巡检,通过无人机对风机叶片进行图像的采集以及分析,发现风机叶片上的裂缝和鼓包,通过无人机对风机叶片的巡检可以提升风电巡检的效率。
2、现有的无人机在巡检过程中需要根据巡检路径进行自主导航,然后对风电叶片进行视频影像数据的采集,风电设备使用的地理位置多为周围是开阔地的空间区域,由于风电设备的发电是基于风力的,所以风电设备所处的位置风力都比城市市区的风大,现有的商用无人机虽然已经具备巡检以及视频数据采集的能力,但现有的风电运维巡检已经不局限在对风机叶片的裂缝以及鼓包进行识别,现有的风电运维巡检是要全方位通过无人机替代人工完成风电运维的整套工作流程。例如,通过风电巡检设备完成陆空一体化的风电运维工作,包括风电设备上的视觉检测以及配合维修人员的风电运维零部件搬运工作,在实际使用中,由于处于风力较大的环节下,风电巡检设备在自然环境不可控的环境中会出现误差,导致无法按预设的巡检路径完成相应的工作任务,例如,在风力较大以及雨雪天气,虽然预先设定了风电巡检设备的巡检路径以及巡检对象,但是在极端自然环境下,风电巡检设备无法正常完成巡检相关数据的采集工作,导致风电巡检无法正常完成,为解决此问题研发出一种风电全自主巡检系统及其方法。
技术实现思路
1、本发明的目的在于提供一种风电全自主巡检系统及其方法,以解决在极端自然环境下,风电巡检设备无法正常完成巡检相关数据的采集工作,导致风电巡检无法正常完成的问题。
2、第一方面,本发明提供一种风电全自主巡检系统,包括;
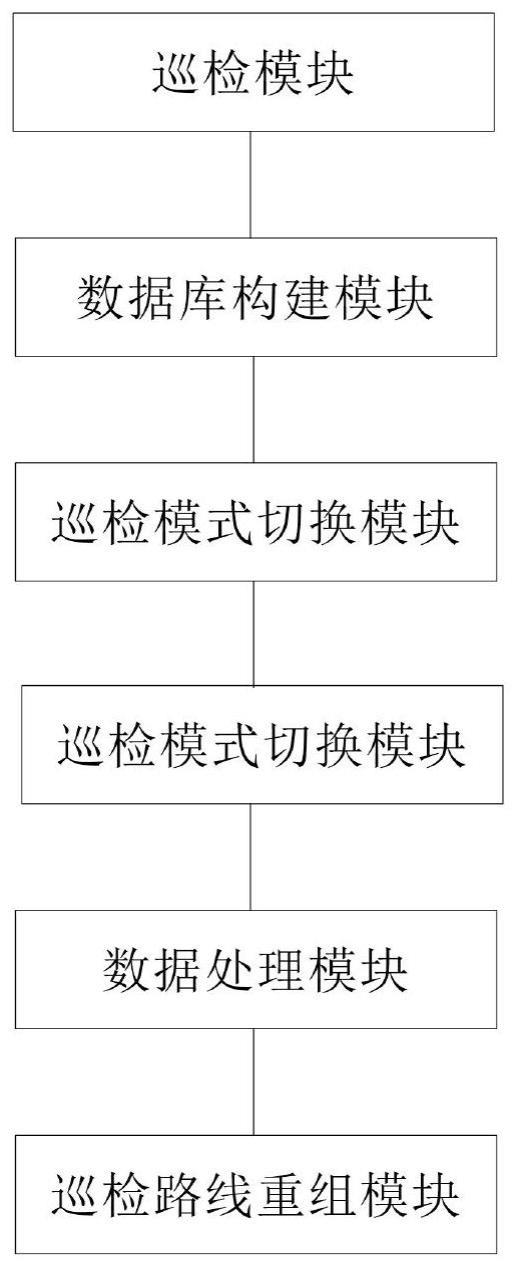
3、巡检模块:其包括用于获取巡检设备巡检原始路径参数,所述巡检设备巡检原始路径参数包括:巡检设备移动坐标,巡检设备移动速度参数,拍摄目标物体坐标参数以及巡检路径参数,根据所述巡检设备巡检路径参数生成标准巡检路径;
4、数据库构建模块:其包括用于巡检设备静态状态下采集巡检设备所处区域自然环境数据,所述自然环境参数包括:风向数据、风速数据,并构建气动模型数据库;
5、巡检模式切换模块:其包括用于对所述巡检设备采集巡检设备所处区域自然环境数据进行预处理,得到有效巡检设备所处自然环境有效数据,将所述巡检设备所处自然环境有效数据在数字孪生模型中生成模拟风力对巡检设备影响的第一影像,若所述模拟风力对巡检设备影响的三维影像上的巡检设备路径参数与通过巡检设备巡检原始路径参数模拟产生的第二影像中巡检设备的路径参数存在误差,则启用巡检设备路径误差修正模式;
6、巡检风险评估模块:其包括用于通过巡检设备采集所在区域影像数据,对所述巡检设备采集所在区域影像数据中动态物体摆动幅度以及频率进行统计,根据所在区域影像数据中动态物体摆动幅度以及频率进行统计结果匹配所述气动模型数据库中的气动模型;
7、数据处理模块:其包括用于将巡检设备在巡检路径采集的自然环境参数代入至所述气动模型中,得到自然环境中风力对巡检设备的影响数据;
8、巡检路线重组模块:其包括用于采集巡检设备实时坐标数据,将所述采集巡检设备实时坐标数据与所述巡检设备巡检原始路径参数进行比对,得到实时巡检坐标误差,然后根据实时巡检坐标误差,生成实时补检路径数据,巡检设备根据实时补检路径完成风电设备巡检补检。
9、优选的,所述巡检模块用于获取巡检设备在巡检前通过用户控制端设置的原始巡检路径参数,将所述原始巡检路径参数代入至数字孪生模型中,生成原始巡检路径影像信息,根据用户控制端反馈信息对原始巡检路径参数进行实时数据更新,生成动态原始路径更新数据,将所述动态原始路径更新数据实时代入至数字孪生模型中,得到动态原始巡检路径影像信息。
10、优选的,所述数据库构建模块用于实时获取巡检设备移动过程中的坐标数据,将所述巡检设备移动过程中的坐标数据与所述巡检设备巡检原始路径参数中所述巡检设备移动坐标进行比对,将巡检设备移动过程中在指定时间段范围内的坐标点对应的自然环境数据进行数据汇总,根据自然环境数据的特征进行聚合,得到所述巡检设备所处区域自然环境数据。
11、优选的,所述巡检模式切换模块用于根据巡检设备的路径参数误差,对巡检设备的巡检启动巡检设备路径误差修正模式,所述巡检设备路径误差修正模式包括,巡检路径微调,巡检设备路径重置以及巡检路径优化,所述巡检路径优化为根据所述巡检设备巡检原始路径参数的终点坐标以及被巡检物体坐标,生成围绕被巡检物体的多组巡检路径,通过巡检设备所述多组巡检路径完成对巡检目标的巡检,在所述巡检路径微调以及所述巡检设备路径重置后巡检设备扔无法完成对巡检目标巡检时,则启用所述多组巡检路径。
12、优选的,巡检路线重组模块用于采集巡检设备实时坐标数据,所述巡检设备实时坐标数据包括巡检设备实时二维坐标数据以及巡检设备实时三维坐标数据,所述巡检设备原始路径参数包括巡检设备原始二维坐标数据以及巡检设备原始三维坐标数据,将所述巡检设备实时二维坐标数据与所述巡检设备原始二维坐标数据进行数据对比,得到第一坐标误差数据,将所述巡检设备实时三维坐标数据与所述巡检设备原始三维坐标数据进行数据比对,得到第二误差数据,当所述第一误差数据与所述第二误差数据均大于预设值时,巡检路线重组模块则进行所述实时补检路径数据的生产,巡检设备执行所述实时补检路径数据。
13、第二方面,本发明提供一种风电全自主巡检方法,包括;
14、获取巡检设备巡检原始路径参数,所述巡检设备巡检原始路径参数包括:巡检设备移动坐标,巡检设备移动速度参数,拍摄目标物体坐标参数以及巡检路径参数,根据所述巡检设备巡检路径参数生成标准巡检路径;
15、巡检设备静态状态下采集巡检设备所处区域自然环境数据,所述自然环境参数包括:风向数据、风速数据,并构建气动模型数据库;
16、所述巡检设备采集巡检设备所处区域自然环境数据进行预处理,得到有效巡检设备所处自然环境有效数据,将所述巡检设备所处自然环境有效数据在数字孪生模型中生成模拟风力对巡检设备影响的第一影像,若所述模拟风力对巡检设备影响的三维影像上的巡检设备路径参数与通过巡检设备巡检原始路径参数模拟产生的第二影像中巡检设备的路径参数存在误差,则启用巡检设备路径误差修正模式;
17、通过巡检设备采集所在区域影像数据,对所述巡检设备采集所在区域影像数据中动态物体摆动幅度以及频率进行统计,根据所在区域影像数据中动态物体摆动幅度以及频率进行统计结果匹配所述气动模型数据库中的气动模型;
18、将巡检设备在巡检路径采集的自然环境参数代入至所述气动模型中,得到自然环境中风力对巡检设备的影响数据;
19、采集巡检设备实时坐标数据,将所述采集巡检设备实时坐标数据与所述巡检设备巡检原始路径参数进行比对,得到实时巡检坐标误差,然后根据实时巡检坐标误差,生成实时补检路径数据,巡检设备根据实时补检路径完成风电设备巡检补检。
20、本发明的有益效果如下:本发明提供的一种风电全自主巡检系统及其方法,本技术通过巡检模块获取巡检设备巡检原始路径参数,所述巡检设备巡检原始路径参数包括:巡检设备移动坐标,巡检设备移动速度参数,拍摄目标物体坐标参数以及巡检路径参数,根据所述巡检设备巡检路径参数生成标准巡检路径,巡检设备静态状态下采集巡检设备所处区域自然环境数据,所述自然环境参数包括:风向数据、风速数据,并构建气动模型数据库,巡检模式切换模块对所述巡检设备采集巡检设备所处区域自然环境数据进行预处理,得到有效巡检设备所处自然环境有效数据,将所述巡检设备所处自然环境有效数据在数字孪生模型中生成模拟风力对巡检设备影响的第一影像,若所述模拟风力对巡检设备影响的三维影像上的巡检设备路径参数与通过巡检设备巡检原始路径参数模拟产生的第二影像中巡检设备的路径参数存在误差,则启用巡检设备路径误差修正模式;启动巡检设备路径误差修正模式后。将巡检设备所处区域进行巡检风险评估,并匹配气动模型数据库中的气动模型用于对气动对巡检设备的影响进行计算分析,并得出气动气流对巡检设备的影响,包括用于将巡检设备在巡检路径采集的自然环境参数代入至所述气动模型中,得到自然环境中风力对巡检设备的影响数据,将所述采集巡检设备实时坐标数据与所述巡检设备巡检原始路径参数进行比对,得到实时巡检坐标误差,然后根据实时巡检坐标误差,生成实时补检路径数据,巡检设备根据实时补检路径完成风电设备巡检补检,实现在原始巡检路径由于风力很大,或其它自然极端环境的影响下巡检设备无法正常进行巡检,通过重新计算得到新的巡检路径完成对被巡检风电设备巡检的任务。解决在极端自然环境下,风电巡检设备无法正常完成巡检相关数据的采集工作,导致风电巡检无法正常完成的问题。
- 还没有人留言评论。精彩留言会获得点赞!