基于UWB的无感汽车支付方法及相关装置与流程
本发明涉及无线定位,尤其涉及一种基于超宽带(ultra wide band,uwb)的无感汽车支付方法及相关装置。
背景技术:
1、在现有技术中,停车场收费主要是通过人工收费方式,此方式浪费大量人工成本,且效率低,容易造成出入口汽车拥堵。而对于现有的使用uwb技术的无感支付方案,主要是通过uwb定位确定车辆的位置和停车位置;根据uwb定位确定车辆的驶入时间和驶离时间,并根据停车位置的计费规则进行停车费收取后放行车辆。当车流高峰期,服务器需要对大量目标车辆进行定位,并计算和收取停车费用,服务器计算负荷较大进而将降低导致服务器效率,当大量车辆需要进出时,将会导致车辆长时间等待而进而造成拥堵。
技术实现思路
1、针对上述问题,本技术实例提供了一种基于uwb的无感汽车支付方法及相关装置,实现了目标车辆在停车场,高速公路,小区等进出口的无障碍进出,当确定目标车辆需要驶离出口闸门后,根据目标车辆的行驶角度控制出口闸门开启,降低了计算服务器的计算负荷。将支付信息发送至支付服务器后,控制出口闸门打开解决了目标车辆进出口长时间等待而造成的拥堵问题,降低了应用场所人员管理成本,提高了目标车辆的通行效率。
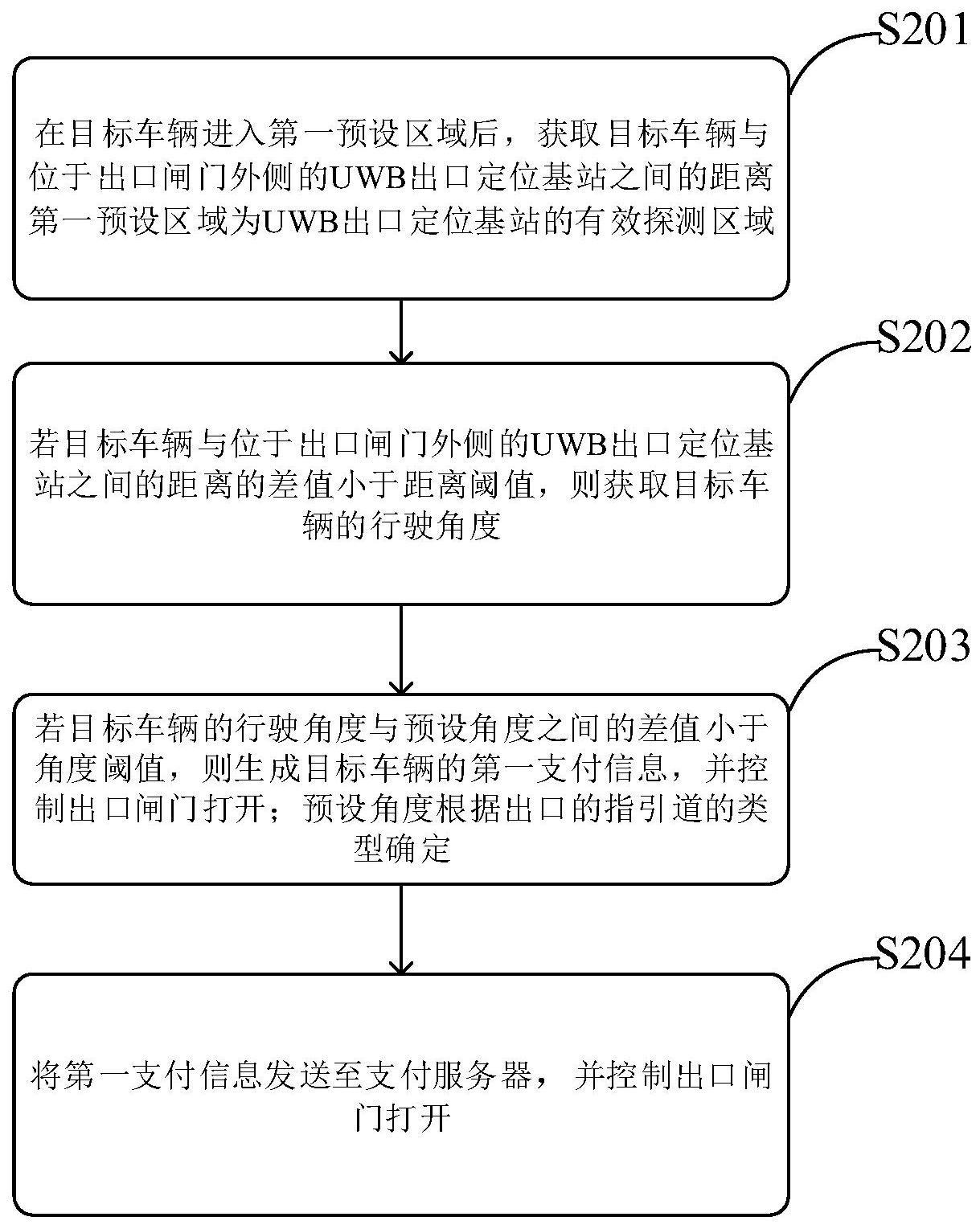
2、为实现上述目的,第一方面,本技术实施例提供了一种基于uwb的无感汽车支付方法,该方法应用于uwb无感汽车支付系统中的计算服务器,uwb无感汽车支付系统还包括uwb出口定位基站和支付服务器,uwb出口定位基站位于出口闸门内侧,方法包括:在目标车辆进入第一预设区域后,获取目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离,第一预设区域为uwb出口定位基站的有效探测区域;若目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离的差值小于距离阈值,则获取目标车辆的行驶角度;若目标车辆的行驶角度与预设角度之间的差值小于角度阈值,则生成目标车辆的第一支付信息,并控制出口闸门打开;预设角度根据出口的指引道的类型确定;将第一支付信息发送至支付服务器,并控制出口闸门打开。
3、结合第一方面,在一种可能的实施例中,在获取目标车辆的行驶角度之前,方法还包括:在目标车辆进入第二预设区域后,获取目标车辆在第二预设区域中的行驶轨迹;第二预设区域与出口闸门之间的距离大于与第一预设区域与出口闸门之间的距离,第二预设区域为uwb出口定位基站的有效探测区域;根据目标车辆的行驶轨迹确定目标车辆的行驶轨迹类型;若目标车辆的行驶轨迹类型为驶离类型,且目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离的差值小于距离阈值,则获取目标车辆的行驶角度。
4、在本技术实施例中可以看出,在目标车辆进入第二预设区域后,获取目标车辆与uwb出口定位基站的距离,计算得到目标车辆行驶轨迹判断目标车辆的行驶轨迹类型,仅当目标车辆的行驶轨迹类型为驶离类型,当确定目标车辆需要驶离出口闸门时,进一步获取目标车辆的行驶角度,减少了计算服务器需要定位的目标车辆的数量,从而降低了计算服务器的计算负荷。
5、结合第一方面,在一种可能的实施例中,获取目标车辆在第二预设区域中的行驶轨迹,包括:目标车辆在第二预设区域行驶过程中,按照预设时间间隔获取目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离,以得到多个距离;距离是通过tof算法得到的;根据uwb出口定位基站的坐标及多个距离,计算得到目标车辆在第二预设区域行驶过程中的多个坐标,基于多个坐标得到目标车辆在第二预设区域中的行驶轨迹。
6、在本技术实施例中可以看出,通过计算服务器采用tof技术对目标车辆进行定位,降低了定位误差,提高了定位精确率,进而降低了基于uwb的无感汽车支付方法的实现难度。
7、结合第一方面,在一种可能的实施例中,根据卡尔曼kf滤波算法对目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离进行滤波处理,得到滤波后的目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离;滤波后的目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离用于计算得到目标车辆在第二预设区域行驶过程中的坐标。
8、在本技术实施例中,通过在定位算法中加入kf滤波算法,对目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离进行滤波处理,在不增加计算服务器计算负荷的情况下,进一步提高了系统对目标车辆的定位精确度。
9、结合第一方面,在一种可能的实施例中,uwb无感汽车支付系统还包括uwb入口定位基站,uwb入口定位基站位于入口闸门外侧,在将第一支付信息发送至支付服务器之后,方法还包括:获取支付服务器发送的支付结果信息;若支付结果信息为目标车辆支付失败,则为目标车辆添加支付失败标记;支付失败标记用于,指示计算服务器在目标车辆进入第三预设区域后控制入口闸门保持关闭,第三预设区域为uwb入口定位基站的有效探测区域。
10、在本技术实施例中,通过为支付失败的目标车辆添加支付失败标记后,控制出口闸门打开,并在携带支付失败标记的目标车辆进入第三预设区域后控制入口闸门保持关闭,若带支付失败标记的目标车辆完成支付后则控制入口闸门开启,在不携带支付失败标记的目标车辆进入第三预设区域后控制入口闸门开启,在保证目标车辆及时处理第一支付信息的同时,提高了目标车辆的通行效率,缓解了出入口闸门的拥堵。
11、结合第一方面,在一种可能的实施例中,uwb无感汽车支付系统还包括uwb入口定位基站,uwb入口定位基站位于入口闸门外侧,在目标车辆进入第一预设区域之前,该方法还包括:在目标车辆进入第三预设区域后,获取目标车辆的历史停车信息,第三预设区域与uwb入口定位基站相对应,历史停车信息包括目标车辆的停车记录;若目标车辆的历史停车信息中的停车记录次数小于预设次数,则为目标车辆添加借道标记,借道标记用于指示计算服务器在目标车辆进入第一预设区域后,控制出口闸门打开。
12、在本技术实施例中,通过向路过的目标车辆添加借道标记,计算服务器直接控制出口闸门打开,而非根据目标车辆的定位信息确定目标车辆的行驶轨迹,航行角度等信息控制出口闸门的开启,从而降低了计算服务器的计算负荷,进而提高了目标车辆的通行效率。
13、结合第一方面,在一种可能的实施例中,在目标车辆进入第二预设区域之前,该方法还包括:获取第一拟合定位信息和第二拟合定位信息,第一拟合定位信息包括目标车辆位于多个参照位置时与uwb入口定位基站的距离,第二拟合定位信息包括目标车辆位于多个参照位置时与uwb出口定位基站的距离;根据第一拟合定位信息和第二拟合定位信息分别对uwb入口定位基站的测距结果和uwb出口定位基站的测距结果进行拟合校准。
14、在本技术实施例中,通过测量处于参照位置的目标车辆对uwb入口定位基站和uwb出口定位基站进行拟合校准,消除uwb入口定位基站和uwb出口定位基站的固定误差,提高了系统的定位效率精确率。
15、第二方面,本技术实施例提供了一种基于uwb的无感汽车支付装置,该装置应用于uwb无感汽车支付系统中的计算服务器,uwb无感汽车支付系统还包括uwb出口定位基站和支付服务器,uwb出口定位基站位于出口闸门内侧,装置包括:获取单元:用于在目标车辆进入第一预设区域后,获取目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离;若目标车辆与位于出口闸门内侧的uwb出口定位基站之间的距离的差值小于距离阈值,则获取目标车辆的行驶角度;生成单元:用于若目标车辆的行驶角度与预设角度之间的差值小于角度阈值,则生成目标车辆的第一支付信息,并控制出口闸门打开;预设角度根据出口的指引道的类型确定;发送单元:用于将第一支付信息发送至支付服务器。
16、第三方面,本技术实施例提供了一种电子设备,包括处理器、存储器、通信接口,以及一个或多个程序,一个或多个程序被存储在存储器中,并且被配置由处理器执行,一条或多条指令适于由处理器加载并执行如第一方面的方法的部分或者全部。
17、第四方面,本技术实施例提供了一种计算机可读存储介质,其存储用于电子数据交换的计算机程序,其中,计算机程序使得计算机执行如第一方面的方法的部分或者全部。
- 还没有人留言评论。精彩留言会获得点赞!