一种车载无人值守时发生意外取证方法及系统与流程
本发明涉及车联网,特别涉及一种车载无人值守时发生意外取证方法及系统。
背景技术:
1、目前,车辆车主将车停在某个地方一段时间后,容易发生车辆被其他车辆碰撞或剐蹭的事件,车主想要找到肇事者赔偿自己的损失一般都需要取证来确定肇事者的车或者人,可以为事故调查和法律处理提供重要的证据。但是,车主的车一般停在停车场或者交通法规定停车的地方,可能会出现没有监控或者监控盲区而无法取证的情形。
2、申请号为:cn202210329336.7的发明专利公开了一种智慧城市交通管理系统,其中,系统包括:中心服务器、节点设备和用户终端,节点设备包括智能hud装置,智能hud装置通过车辆数据接口连接车机系统以获取车辆数据,车辆数据包括车载摄像头采集的影像数据和车辆运行状况数据,智能hud装置用于在检测到车辆碰撞时向周围其他车辆上的智能hud装置广播唤醒信号,在检测到车辆碰撞或接收到唤醒信号时创建新的证据链,将最近一段时间的车辆数据写入区块并添加到证据链中,向所有节点设备进行共识,以及实现空闲停车位数据共享、空闲停车位导航,中心服务器用于保存证据链数据和空闲停车位数据,实现对证据链数据和空闲停车位数据的访问管理,用户终端用于绑定节点设备和向中心服务器请求获取证据链数据。
3、上述现有技术中智能hud装置用于在检测到车辆碰撞时向周围向其他车辆上的智能hud装置广播唤醒信号,但是,在检测到车辆碰撞或接收到唤醒信号时创建新的证据链时,仍然需要向其他车主发出请求从而获取完整的证据链作为取证信息,需要走相应流程,这样会延误取证时机,进而造成车主损失。
4、有鉴于此,亟需一种车载无人值守时发生意外取证方法及系统。
技术实现思路
1、本发明目的之一在于提供了一种车载无人值守时发生意外取证方法,通过目标车辆的车载t-box获取传感器的状态信息,根据状态信息,进行意外发生判定,当判定为发生意外时,自动启动视频取证并将取证获得的目标视频发送给车主,避免了车辆停在监控盲区无法取证的情形或者需要向他人索要证据的情形,提升了取证的及时性,进一步加快了车主损失追回。
2、本发明实施例提供的一种车载无人值守时发生意外取证方法,包括:
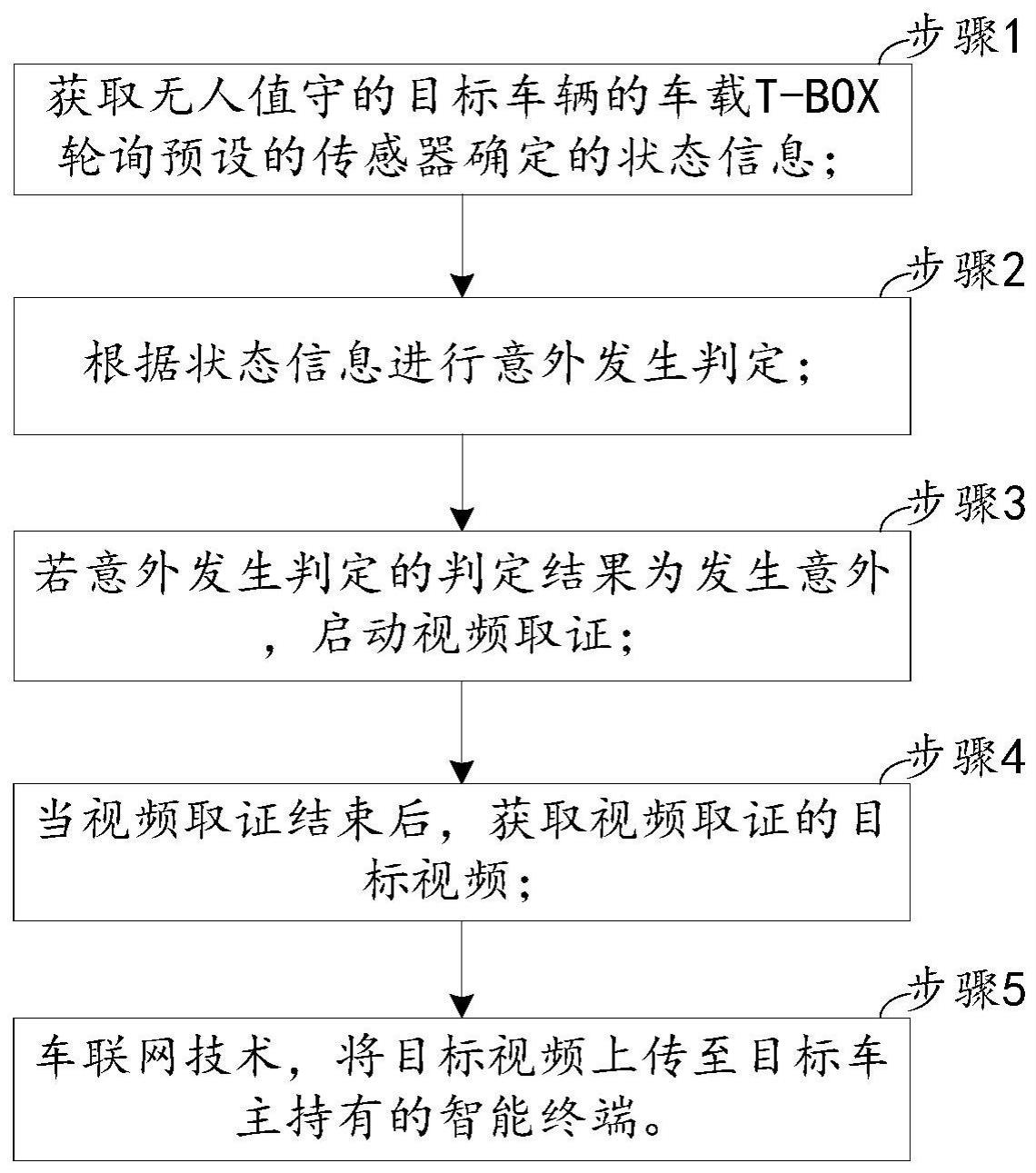
3、步骤1:获取无人值守的目标车辆的车载t-box轮询预设的传感器确定的状态信息;
4、步骤2:根据状态信息进行意外发生判定;
5、步骤3:若意外发生判定的判定结果为发生意外,启动视频取证;
6、步骤4:当视频取证结束后,获取视频取证的目标视频;
7、步骤5:基于车联网技术,将目标视频上传至目标车主持有的智能终端。
8、优选的,步骤1:获取无人值守的目标车辆的车载t-box轮询预设的传感器确定的状态信息,包括:
9、获取目标车辆的车载t-box的网络地址和端口号;
10、根据网络地址和端口号,建立目标车辆的车机与车载t-box的第一通信连接;
11、基于预设的数据包构造规则,构造实现车载t-box对传感器的轮询操作的目标数据包;
12、获取车载t-box的目标通信协议;
13、根据目标通信协议,通过第一通信连接发送目标数据包,获得状态信息。
14、优选的,步骤2:根据状态信息进行意外发生判定,包括:
15、获取历史上参考车辆意外发生时的第一传感器状态记录,同时,获取参考车辆的第一车辆信息;
16、获取目标车辆的第二车辆信息;
17、根据第一车辆信息和第二车辆信息,评价第一传感器状态记录用于意外发生状态信息提取的参照值;
18、若参照值大于等于预设的第一阈值,则将对应第一传感器状态记录作为第二传感器状态记录;
19、解析第二传感器状态记录,获取意外发生状态信息;
20、根据状态信息和意外发生状态信息,进行意外发生判定。
21、优选的,根据第一车辆信息和第二车辆信息,评价第一传感器状态记录用于意外发生状态信息提取的参照值,包括:
22、获取车辆信息特征的特征表示方法;
23、根据特征表示方法,分别确定第一车辆信息的第一车辆特征和第二车辆信息的第二车辆特征;
24、将第一车辆特征和第二车辆特征进行特征匹配,确定匹配符合的特征对;
25、获取特征对的特征类型;
26、将特征类型输入意外发生判断影响关系评价模型,获得输出的影响值,并与对应第一传感器状态记录进行关联;
27、累加计算第一传感器状态记录关联的影响值,获得参照值。
28、优选的,步骤5:基于车联网技术,将目标视频上传至目标车主持有的智能终端,包括:
29、获取目标车主持有的智能终端的终端节点;
30、建立车联网私有云节点与终端节点之间的第二通信连接;
31、根据第二通信连接,将目标视频从车联网私有云节点推送至终端节点。
32、优选的,步骤3:若意外发生判定的判定结果为发生意外,启动视频取证,包括:
33、确定发生意外时目标车辆的碰撞位置;
34、获取预设的广角摄像头相对于目标车辆的分布位置;
35、根据分布位置和碰撞位置,确定广角摄像头中适宜于拍摄碰撞位置的目标摄像头,并调度目标摄像头进行视频取证。
36、优选的,根据分布位置和碰撞位置,确定广角摄像头中适宜于拍摄碰撞位置的目标摄像头,并调度目标摄像头进行视频取证,包括:
37、获取目标车辆的车辆示意图;
38、将碰撞位置在车辆示意图中对应标注,并作为第一点位;
39、将分布位置在车辆示意图中对应标注,并作为第二点位;
40、获取第二点位中与第一点位同一车身侧的第二点位,并作为第三点位;
41、确定第三点位对应的广角摄像头,并作为目标摄像头;
42、获取目标摄像头当前的拍摄方向和无畸变拍摄角度范围;
43、根据拍摄方向和无畸变拍摄角度范围,在车辆示意图上标注目标摄像头的无畸变拍摄区域;
44、根据无畸变拍摄区域和第一点位的相对位置,确定无畸变拍摄区域距离第一点位最近的区域划分线;
45、判断第一点位是否在无畸变拍摄区域内,若是,则直接调度目标摄像头进行视频取证;
46、否则,绘制以第三点位为端点且从第三点位向第一点位射出的目标射线;
47、计算区域划分线与目标射线之间的目标夹角;
48、根据目标夹角和相对位置,调度目标摄像头调整目标夹角进行视频取证。
49、优选的,根据目标夹角和相对位置,调度目标摄像头调整目标夹角进行视频取证,包括:
50、获取目标摄像头调整目标夹角后拍摄的目标图像,并确定目标图像中的取证目标;
51、获取取证目标的目标类型;
52、获取目标类型预设的标识信息抓取规则,抓取取证目标的标识信息;
53、根据标识信息,实时获取取证目标的目标位置;
54、构建分布位置为向量起点,分布位置向目标位置方向的第一向量;
55、获取广角摄像头的可拍摄方向;
56、构建分布位置为向量起点,可拍摄方向为向量方向的第二向量;
57、计算第一向量与第二向量的向量夹角;
58、实时确定向量夹角最小的可拍摄方向,并作为目标调整方向,同时,将向量夹角最小的可拍摄方向对应的广角摄像头作为接续拍摄摄像头;
59、控制接续拍摄摄像头调整至目标调整方向识别取证目标进行接续拍摄。
60、本发明实施例提供的一种车载无人值守时发生意外取证系统,包括:
61、状态信息获取子系统,用于获取无人值守的目标车辆的车载t-box轮询预设的传感器确定的状态信息;
62、意外发生判定子系统,用于根据状态信息进行意外发生判定;
63、视频取证子系统,用于若意外发生判定的判定结果为发生意外,启动视频取证;
64、目标视频获取子系统,用于当视频取证结束后,获取视频取证的目标视频;
65、目标视频上传子系统,用于基于车联网技术,将目标视频上传至目标车主持有的智能终端。
66、优选的,状态信息获取子系统,包括:
67、网络地址获取模块,用于网络获取目标车辆的车载t-box的网络地址和端口号;
68、第一通信连接建立模块,用于根据网络地址和端口号,建立目标车辆的车机与车载t-box的第一通信连接;
69、目标数据包构造模块,用于基于预设的数据包构造规则,构造实现车载t-box对传感器的轮询操作的目标数据包;
70、目标通信协议获取模块,用于获取车载t-box的目标通信协议;
71、状态信息获取模块,用于根据目标通信协议,通过第一通信连接发送目标数据包,获得状态信息。
72、本发明的有益效果为:
73、本发明通过目标车辆的车载t-box获取传感器的状态信息,根据状态信息,进行意外发生判定,当判定为发生意外时,自动启动视频取证并将取证获得的目标视频发送给车主,避免了车辆停在监控盲区无法取证的情形或者需要向他人索要证据的情形,提升了取证的及时性,进一步加快了车主损失追回。
74、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
75、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!