无人车的解锁控制方法及电子设备与流程
本申请实施方式涉及无人车,特别是涉及一种无人车的解锁控制方法及电子设备。
背景技术:
1、无人车,是一种无须人工干预而能够感知其周边环境和导航的车辆,可用于执行配送、引领、清洁等任务。例如:无人车可以在室外执行清洁任务,对园区、公共道路等区域进行清洁。
2、目前,在室外存在多个可用于执行相同任务的无人车的情况下,用户需要在本地的多个无人车中选择一个无人车,并解锁该无人车执行任务。然而用户无法确定选择解锁的无人车是否满足执行任务的条件,不能在无人车本地实现针对性地解锁适合执行任务的无人车。
技术实现思路
1、为了解决上述技术问题,本申请实施例提供一种无人车的解锁控制方法及电子设备,以在无人车本地实现针对性地解锁适合执行任务的无人车。
2、本申请实施例提供以下技术方案:
3、第一方面,本申请实施例提供一种无人车的解锁控制方法,应用于无人车,无人车的解锁控制方法包括:
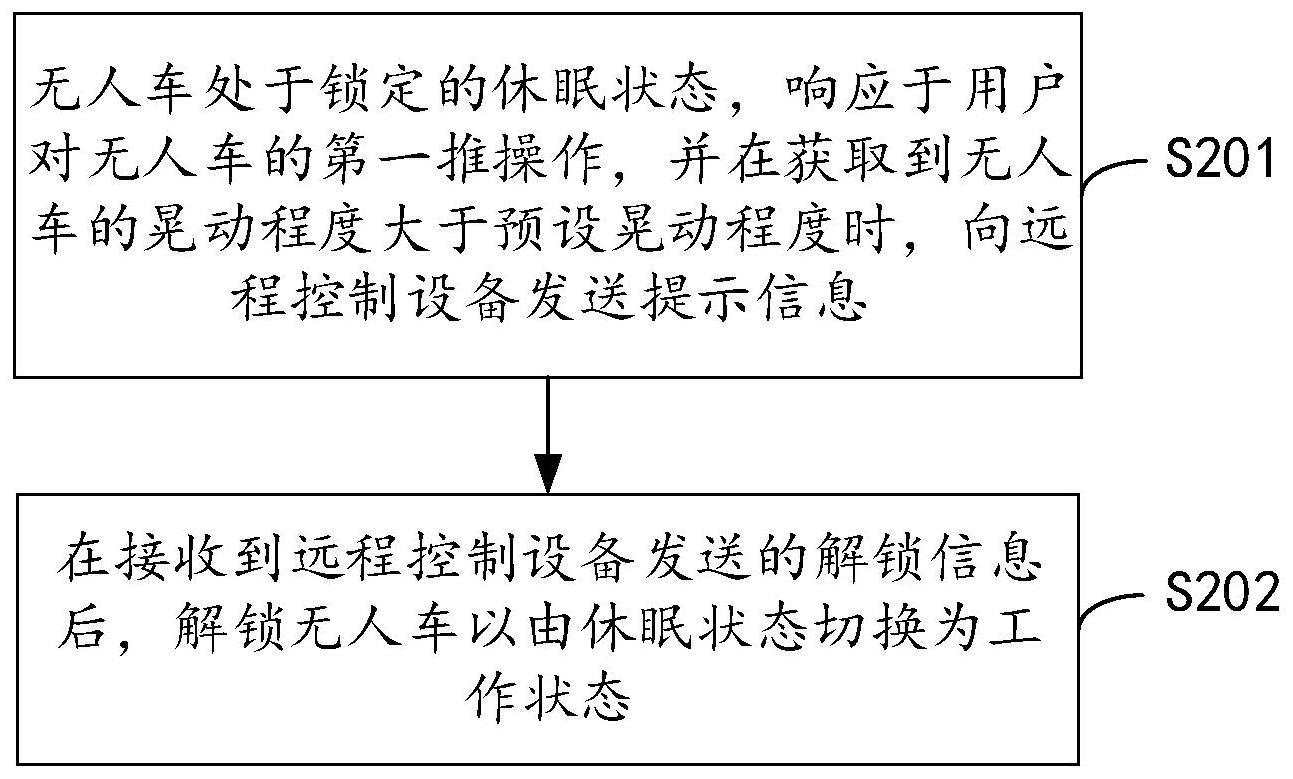
4、无人车处于锁定的休眠状态,响应于用户对无人车的第一推操作,并在获取到无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息,其中,在远程控制设备根据提示信息确定无人车满足解锁条件后,远程控制设备向无人车发送解锁信息;
5、在接收到远程控制设备发送的解锁信息后,解锁无人车以由休眠状态切换为工作状态。
6、在一些实施例中,无人车配置有惯性传感器;
7、无人车处于锁定的休眠状态,响应于用户对无人车的第一推操作,并在获取到无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息的步骤,包括:
8、无人车处于锁定的休眠状态,基于惯性传感器检测是否存在用户对无人车做第一推操作;
9、在检测到用户对无人车做第一推操作,且获取到的无人车的俯仰角和/或翻滚角大于预设角度值时,则确定无人车的晃动程度大于预设晃动程度,并向远程控制设备发送提示信息。
10、在一些实施例中,向远程控制设备发送提示信息的步骤,包括:
11、向远程控制设备的显示界面发起顶置的对话框,以供管理人员在根据所述提示信息确定许可之后基于对话框向无人车发送解锁信息,其中,在对话框中显示有提示信息;或者,
12、向远程控制设备发送提示信息,以供管理系统根据提示信息确定许可之后向无人车发送解锁信息。
13、在一些实施例中,无人车为轮式无人车;
14、在无人车处于锁定的休眠状态时,无人车的车轮被锁住;
15、在无人车处于解锁之后的工作状态时,无人车的车轮被解锁释放。
16、在一些实施例中,无人车为清洁无人车,无人车配置有清水箱、污水箱和清洁用具,提示信息携带有无人车的身份标识;
17、在远程控制设备根据提示信息确定无人车满足解锁条件后,远程控制设备向无人车发送解锁信息的步骤,包括:
18、远程控制设备根据提示信息中的身份标识获取对应无人车的状态信息,其中,状态信息包括电池的电量、清水箱的清水量、污水箱的污水量和清洁用具的损耗程度;
19、在无人车电池的电量大于预设电量,且清水箱的清水量大于预设清水量,且污水箱的污水量小于预设污水量,且清洁用具的损耗程度小于预设损耗程度时,确定无人车满足解锁条件,远程控制设备向无人车发送解锁信息。
20、在一些实施例中,方法还包括:
21、在确定无人车不满足解锁条件时,在无人车的状态信息中获取不满足解锁条件的因素,并在无人车的显示界面显示。
22、在一些实施例中,解锁无人车以由休眠状态切换为工作状态的步骤之后,方法还包括:
23、响应于用户在无人车的显示界面的选择操作,确定用户的清洁需求,清洁需求包括清洁区域、清洁方式、清洁时间段和清洁后的停靠位置中的一项或多项;
24、控制无人车根据清洁需求执行清洁动作。
25、在一些实施例中,解锁无人车以由休眠状态切换为工作状态的步骤之后,方法还包括:
26、响应于用户对无人车的第二推操作;
27、根据第一推操作与第二推操作的推动方向确定第二推操作的用户意图,根据用户意图控制无人车运行。
28、在一些实施例中,根据第一推操作与第二推操作的推动方向确定第二推操作的用户意图,根据用户意图控制无人车运行的步骤,包括:
29、在第一推操作的推动方向和第二推操作的推动方向之间的角度在第一角度区间时,确定第二推操作的用户意图为暂停执行当前任务,控制无人车暂停执行当前任务;
30、在第一推操作的推动方向和第二推操作的推动方向之间的角度在第二角度区间时,确定第二推操作的用户意图为取消执行当前任务,控制无人车取消执行当前任务;
31、在第一推操作的推动方向和第二推操作的推动方向之间的角度在第三角度区间时,确定第二推操作的用户意图为控制无人车进入休眠状态,控制无人车锁定,并进入休眠状态。
32、第二方面,本申请实施例提供一种无人车的解锁控制装置,包括:
33、发送单元,用于无人车处于锁定的休眠状态,响应于用户对无人车的第一推操作,并在获取到无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息,其中,在远程控制设备根据提示信息确定无人车满足解锁条件后,远程控制设备向无人车发送解锁信息。
34、解锁单元,用于在接收到远程控制设备发送的解锁信息后,解锁无人车以由休眠状态切换为工作状态。
35、第三方面,本申请实施例提供一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的解锁控制程序,解锁控制程序被处理器执行时实现如第一方面所述的无人车的解锁控制方法的步骤。
36、第四方面,本申请实施例提供一种非易失性计算机可读存储介质,非易失性计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现如第一方面的无人车的解锁控制方法。
37、本申请实施方式的有益效果是:区别于现有技术的情况,本申请实施方式提供一种无人车的解锁控制方法,应用于无人车,该无人车的解锁控制方法包括:无人车处于锁定的休眠状态,响应于用户对无人车的第一推操作,并在获取到无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息,其中,在远程控制设备根据提示信息确定无人车满足解锁条件后,远程控制设备向无人车发送解锁信息;在接收到远程控制设备发送的解锁信息后,解锁无人车以由休眠状态切换为工作状态。通过响应用户对处于锁定的休眠状态的无人车的第一推操作,在无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息,并在远程控制设备确定无人车满足解锁条件后,解锁无人车,本申请能够在无人车本地实现针对性地解锁适合执行任务的无人车。
技术特征:
1.一种无人车的解锁控制方法,其特征在于,应用于无人车,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述无人车配置有惯性传感器;
3.根据权利要求2所述的方法,其特征在于,向所述远程控制设备发送提示信息的步骤,包括:
4.根据权利要求1所述的方法,其特征在于,所述无人车为轮式无人车;在所述无人车处于锁定的休眠状态时,所述无人车的车轮被锁住;在所述无人车处于解锁之后的工作状态时,所述无人车的车轮被解锁释放。
5.根据权利要求1所述的方法,其特征在于,所述无人车为清洁无人车,所述无人车配置有清水箱、污水箱和清洁用具,所述提示信息携带有无人车的身份标识;
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求5所述的方法,其特征在于,解锁所述无人车以由休眠状态切换为工作状态的步骤之后,所述方法还包括:
8.根据权利要求1-7任一项所述的方法,其特征在于,解锁所述无人车以由休眠状态切换为工作状态的步骤之后,所述方法还包括:
9.根据权利要求8所述的方法,其特征在于,根据所述第一推操作与所述第二推操作的推动方向确定所述第二推操作的用户意图,根据所述用户意图控制所述无人车运行的步骤,包括:
10.一种电子设备,其特征在于,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的解锁控制程序,所述解锁控制程序被所述处理器执行时实现如权利要求1至9中任一项所述的无人车的解锁控制方法的步骤。
技术总结
本申请涉及无人车技术领域,公开了一种无人车的解锁控制方法及电子设备。无人车的解锁控制方法应用于无人车,无人车的解锁控制方法包括:无人车处于锁定的休眠状态,响应于用户对无人车的第一推操作,并在获取到无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息;在接收到远程控制设备发送的解锁信息后,解锁无人车以由休眠状态切换为工作状态。通过响应于用户对处于锁定的休眠状态的无人车的第一推操作,在无人车的晃动程度大于预设晃动程度时,向远程控制设备发送提示信息,并在远程控制设备确定无人车满足解锁条件后,解锁无人车,本申请能够在无人车本地实现针对性地解锁适合执行任务的无人车。
技术研发人员:刘大志,梁朋
受保护的技术使用者:深圳优地科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!