一种基于重力感应的矿服智能回收装置的制作方法
本技术涉及矿服回收智能化领域,具体涉及一种基于重力感应的矿服智能回收装置。
背景技术:
1、目前,部分矿井未配备脏衣回收筐,矿工升井洗浴后需将脱下的脏衣自行送至洗衣房,未实现矿服智能回收,该现状增加了矿工的劳累度。还有部分矿井虽配备脏衣回收筐,但回收筐是否已满需工作人员人工进行查看,回收筐满载后亦需工作人员人工推送至洗衣房,管理方式传统低效,劳时费力。
2、针对煤矿企业现状,为减少矿工劳累度,提高员工幸福感,提高脏衣回收智能化水平,本实用新型提出基于重力感应及rfid识别技术的矿服智能回收装置,实现矿工升井区脱脏外衣及洗浴区脱脏绒衣至就近回收筐即可,满载后可由agv智能搬运车运送至洗衣房,省去矿工自行送脏衣物的流程,且可实现脏衣信息识别,为后续矿服的智能分拣分发提供数据基础。
技术实现思路
1、针对上述存在的问题,本实用新型旨在提供一种基于重力感应的矿服智能回收装置,其结构简单、制造容易、使用方便且成本低。
2、为了实现上述目的,本实用新型所采用的技术方案如下:一种基于重力感应的矿服智能回收装置,其特征在于,包括多功能固定架以及移动回收筐,移动回收筐中移动回收筐装载内置射频标签的衣物,并可分离式置于多功能固定架中;多功能固定架包括架体、led显示屏、rfid识别装置、电源模组、称重模块、控制模块和至少两个激光感应装置; 电源模组用于为led显示屏、rfid识别装置、称重模块、控制模块和激光感应装置供电;led显示屏、rfid识别装置、电源模组、称重模块与控制模块通讯连接;控制模块与agv智能搬运车通讯连接;
3、架体包括底板、垂直姿态连接底板边缘的的三面侧板,且三面侧板按照顺序以相邻侧边进行对接,且收尾侧板外侧侧边彼此不对接,形成侧面敞开口,侧板为绝缘金属板,具有射频屏蔽功能;
4、称重模块设置于底板上表面,称重模块包括重力传感器和承重板,承重板与地面保持水平高度,重力传感器设置于底板上表面,承重板表面为弧面结构,承重板表面最大突出距离的位置对接重力传感器,承重板内凹面指向背向重力传感器,重力传感器测得重力数据并将从重力数据信号转换为电信号,通过与控制模块的连接,基于移动回收筐可分离式置于承重板内凹面上,基于移动回收筐通过三面侧板形成的侧面敞开口送入承重板内凹面上,用于实时监测移动回收筐重量;
5、led显示屏,设置于多功能固定架侧板上,用于接收控制模块的数据信号,实时展示移动回收筐重量数据及衣物信息数据;
6、rfid感应识别装置,基于移动回收筐可分离式置于承重板内凹面上,安装于多功能固定架内部,用于读取距离内衣物唯一识别码,获取移动回收筐所装载衣物所属人员数据及数量数据,并将人员数据与数量数据传输至信号数据;
7、激光感应装置,基于移动回收筐可分离式置于承重板内凹面上,设置于多功能固定架侧板内部高于移动回收筐对应顶部敞开口预设高度,各激光感应装置以预设间距相对设置,用于识别移动回收筐内衣物是否满载,并将满载信息传输至控制模块;
8、控制模块接收称重模块发出的重力数据、激光感应装置发出的满载信息、以及rfid感应识别装置发出的人员数据与数量数据并进行数据处理,发送重力数据以及人员数据与数量数据至led显示屏,控制模块发送取货指令信号至 agv智能搬运车,实现agv智能搬运车自动取货。
9、优选的,移动回收筐,移动回收筐的筐体包括底板以及垂直姿态连接底板边缘的的四面侧板,且四面侧板按照顺序以相邻侧边进行对接,且首尾侧板外侧侧边彼此不对接,形成顶部敞开口。
10、优选的,agv智能搬运车挂接装置设置于移动回收筐外侧预设高度,用于移动回收筐外接agv智能搬运车对其进行牵引。
11、优选的,移动回收筐还包括两个握把,所述握把设置于移动回收筐外侧预设高度,且两握把设置于agv智能搬运车挂接装置所设置侧面的两相对侧面。
12、优选的,移动回收筐还包括万向轮,设置于移动回收筐底板下方,用于实现移动回收筐依托agv智能搬运车的移动。
13、优选的,移动回收筐还包括振动装置和镂空底板,振动装置设置于移动回收筐侧面,结合镂空底板结构,实现煤尘脱落至多功能固定架,用于辅助除尘。
14、优选的,电源模组包括充电位和电池位;电池和充电口分别安装于多功能固定架一侧,多功能固定架包括充电口和备用电池两种供电模式,为多功能固定架各模块供电。
15、优选的,所述的多功能固定架,由不锈钢结构构成,三面具有射频屏蔽功能,尺寸为1400mm(长)*1200mm(宽)*900mm(深),底部内嵌于地下200mm。
16、优选的,筐体,外观呈长方体形筐状,由合金钢结构构成,其开口向上。筐体尺寸为1200mm(长)*1000mm(宽)*500mm(深)。
17、优选的,万向轮,结构允许在动载或者静载中水平360度旋转。万向轮高100mm。
18、优选的,移动回收筐握把,通过对人机工程学的数据的分析并将数据运用到回收筐当中,设置握把高800mm,宽100mm(可根据需求定制),可使值班人员在使用当中感到更加舒适,减少身体上的疲劳。
19、优选的,所述的rfid感应识别装置,读取距离1400mm,安装于距离多功能固定架底部800mm位置,可以自动扫描脏衣唯一识别码,识别回收筐内衣物所属人员及数量,为后续衣物分拣提供数据依据。
20、所述的激光感应装置,可以识别回收筐内衣物是否满载。
21、优选的,一种基于重力感应的矿服智能回收装置技术参数如下:量程:≤30kg;输入阻抗:385±35q;灵敏度:2.0±0.1mv/v;输出阻抗:350±3ω;综合精度:0.05%f·s;绝缘阻抗:≥2000mq;蠕变:±0.03%f·s/30min;激励电压:5~12vdc;非线性:±0.03%f·s;工作温度范围:20~70℃;滞后误差:±0.03%f·s;允许过负荷:120%f·s;重复性误差:±0.03%f·s;密封等级:ip66;零点温度系数:±0.03%f·s/10℃;材质:合金钢;输出温度系数:±0.03%f·s/10℃。
22、本实用新型的有益效果是:本实用新型结构简单、制造容易、使用方便且成本低。不同于目前普通回收装置,本实用新型的基于重力感应的矿服智能回收装置根据需求定制尺寸和钣金结构。 在升井区和洗浴室脏衣回收区域分别设置多功能固定架及移动回收筐,员工在升井后直接脱脏外衣,洗浴更衣时直接脱脏绒衣放进回收筐,回收筐满载提醒后可由agv智能搬运车将回收筐搬运至洗衣房,从而改善旷工自行送至洗衣房的现状,且可实现脏衣信息识别,为后续矿服的智能分拣分发提供数据基础,减轻矿工劳累度及洗衣房工作人员工作量,提升员工幸福感,提高脏衣回收智能化水平。
技术特征:
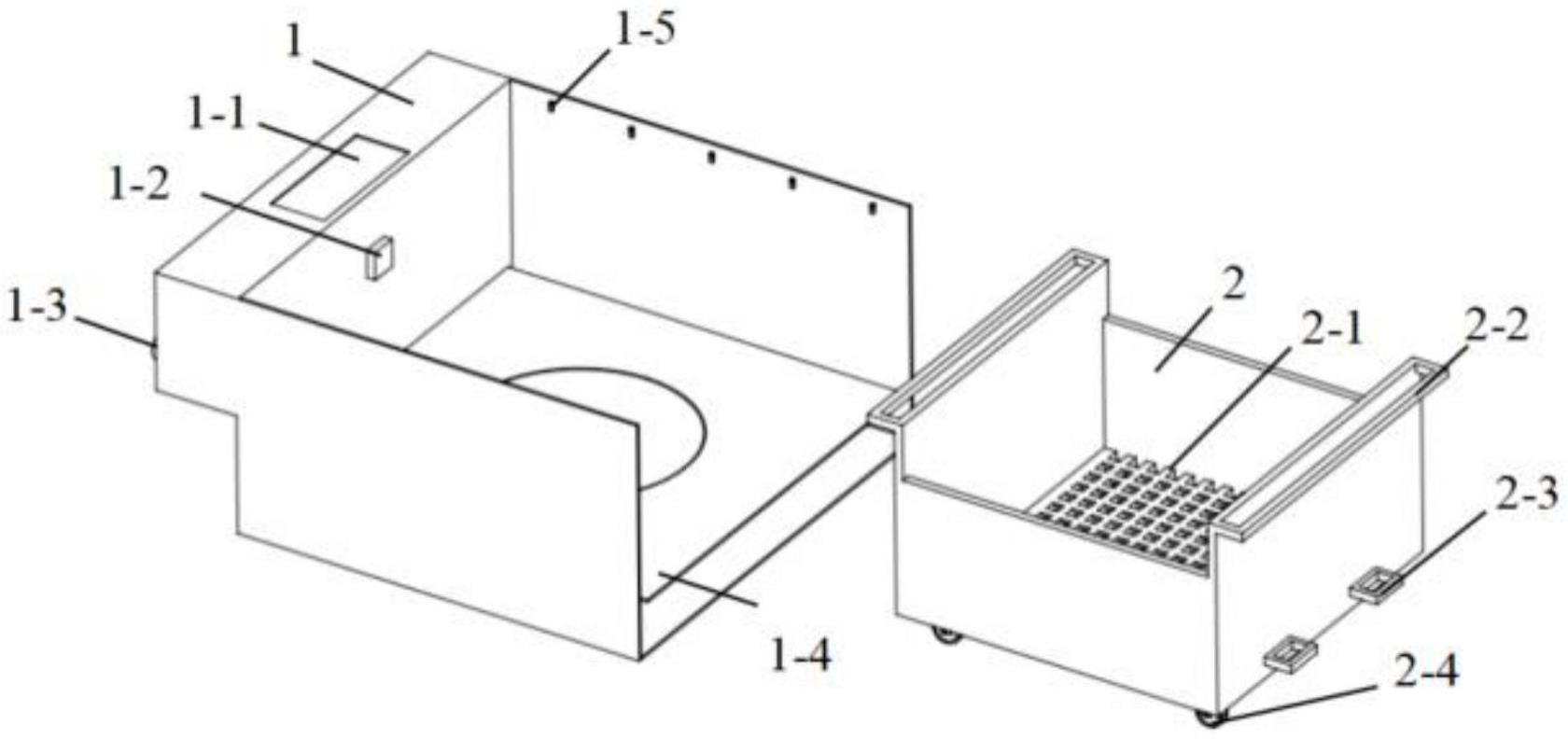
1.一种基于重力感应的矿服智能回收装置,其特征在于,包括多功能固定架(1)以及移动回收筐(2),移动回收筐(2)中移动回收筐(2)装载内置射频标签的衣物,并可分离式置于多功能固定架(1)中;多功能固定架(1)包括架体、led显示屏、rfid识别装置、电源模组、称重模块(1-4)、控制模块(1-6)和至少两个激光感应装置(1-5); 电源模组用于为led显示屏、rfid识别装置、称重模块(1-4)、控制模块(1-6)和激光感应装置(1-5)供电;led显示屏、rfid识别装置、电源模组、称重模块(1-4)与控制模块(1-6)通讯连接;控制模块(1-6)与agv智能搬运车通讯连接;架体包括底板、垂直姿态连接底板边缘的三面侧板,且三面侧板按照顺序以相邻侧边进行对接,且收尾侧板外侧侧边彼此不对接,形成侧面敞开口,侧板为绝缘金属板,具有射频屏蔽功能;称重模块(1-4)设置于底板上表面,称重模块(1-4)包括重力传感器和承重板,承重板与地面保持水平高度,重力传感器设置于底板上表面,承重板表面为弧面结构,承重板表面最大突出距离的位置对接重力传感器,承重板内凹面指向背向重力传感器,重力传感器测得重力数据并将从重力数据信号转换为电信号,通过与控制模块(1-6)的连接,基于移动回收筐(2)可分离式置于承重板内凹面上,基于移动回收筐(2)通过三面侧板形成的侧面敞开口送入承重板内凹面上,用于实时监测移动回收筐(2)重量;led显示屏,设置于多功能固定架(1)侧板上,用于接收控制模块(1-6)的数据信号,实时展示移动回收筐(2)重量数据及衣物信息数据;rfid感应识别装置(1-2),基于移动回收筐(2)可分离式置于承重板内凹面上,安装于多功能固定架(1)内部,用于读取距离内衣物唯一识别码,获取移动回收筐(2)所装载衣物所属人员数据及数量数据,并将人员数据与数量数据传输至信号数据;激光感应装置(1-5),基于移动回收筐(2)可分离式置于承重板内凹面上,设置于多功能固定架(1)侧板内部高于移动回收筐(2)对应顶部敞开口预设高度,各激光感应装置(1-5)以预设间距相对设置,用于识别移动回收筐(2)内衣物是否满载,并将满载信息传输至控制模块(1-6);控制模块(1-6)接收称重模块(1-4)发出的重力数据、激光感应装置(1-5)发出的满载信息、以及rfid感应识别装置(1-2)发出的人员数据与数量数据并进行数据处理,发送重力数据以及人员数据与数量数据至led显示屏,控制模块(1-6)发送取货指令信号至 agv智能搬运车,实现agv智能搬运车自动取货。
2.根据权利要求1所述的一种基于重力感应的矿服智能回收装置,其特征在于:所述移动回收筐(2),移动回收筐(2)的筐体包括底板以及垂直姿态连接底板边缘的四面侧板,且四面侧板按照顺序以相邻侧边进行对接,且首尾侧板外侧侧边彼此不对接,形成顶部敞开口。
3.根据权利要求2所述的一种基于重力感应的矿服智能回收装置,其特征在于:还包括agv智能搬运车挂接装置(2-3),智能搬运车挂接装置(2-3)设置于移动回收筐(2)外侧预设高度,用于移动回收筐(2)外接agv智能搬运车对其进行牵引。
4.根据权利要求2所述的一种基于重力感应的矿服智能回收装置,其特征在于:所述移动回收筐(2)还包括两个握把(2-2),所述握把(2-2)设置于移动回收筐(2)外侧预设高度,且两握把(2-2)设置于agv智能搬运车挂接装置(2-3)所设置侧面的两相对侧面。
5.根据权利要求2所述的一种基于重力感应的矿服智能回收装置,其特征在于:所述移动回收筐(2)还包括万向轮(2-4),设置于移动回收筐(2)底板下方,用于实现移动回收筐(2)依托agv智能搬运车的移动。
6.根据权利要求2所述的一种基于重力感应的矿服智能回收装置,其特征在于:所述移动回收筐(2)还包括振动装置(2-5)和镂空底板(2-1),振动装置(2-5)设置于移动回收筐(2)侧面,结合镂空底板(2-1)结构,实现煤尘脱落至多功能固定架(1),用于辅助除尘。
7.根据权利要求1所述的一种基于重力感应的矿服智能回收装置,其特征在于:所述电源模组包括充电位(1-3)和电池位(1-7);电池和充电口分别安装于多功能固定架(1)一侧,多功能固定架(1)包括充电口和备用电池两种供电模式,为多功能固定架(1)各模块供电。
技术总结
本技术公开了一种基于重力感应的矿服智能回收装置,包括多功能固定架以及移动回收筐,移动回收筐中移动回收筐装载内置射频标签的衣物,并可分离式置于多功能固定架中;多功能固定架包括架体、LED显示屏、RFID识别装置、电源模组、称重模块、控制模块和至少两个激光感应装置。LED显示屏、RFID识别装置、电源模组、称重模块与控制模块通讯连接;控制模块与AGV智能搬运车通讯连接。回收筐满载提醒后可由AGV智能搬运车将回收筐搬运至洗衣房,以此改善旷工自行送至洗衣房的现状,且可实现脏衣信息识别,为后续矿服的智能分拣分发提供数据基础,减轻矿工劳累度及洗衣房工作人员工作量。
技术研发人员:魏红磊,曹建时,冀连权,刘真,周亘儒,王云娜,陈楠,聂鹏,王继有,王世伟,庞文杰,孟龙,陈翔鹄
受保护的技术使用者:南京业恒达智能系统有限公司
技术研发日:20230110
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!