识别车辆的营运行为的方法、装置及计算设备与流程
[0001]
本申请涉及人工智能(artificial intelligence,ai)技术领域,特别涉及一种识别车辆的营运行为的方法、装置及计算设备。
背景技术:
[0002]
在交通运输中,为了维护道路运输市场秩序,消除交通安全隐患,会禁止非法营运车辆进行营运。在确定非法营运车辆时,首先需要在道路上行驶的大量车辆中,确定出具有营运行为的车辆,然后在这些车辆中确定非法营运车辆,所以如何确定具有营运行为的车辆就尤为重要。
[0003]
相关技术中,为了确定具有营运行为的车辆,一般是交通执法人员在路口突击检查经过的车辆,确定经过的车辆是否具有营运行为。
[0004]
由于路口的数量巨大,若每个路口都设置交通执法人员,会花费大量的人力,若仅在某些路口设置交通执法人员,具有非法营运行为的车辆可以避开检查的路口行驶,导致检查效果不佳。而且在交通执法人员的检查过程中,有可能某些非法营运的车辆仅是当前不具有营运行为,也会导致检查效果不佳。
技术实现要素:
[0005]
本申请提供了一种识别车辆的营运行为的方法、装置及计算设备,用以高效的确定具有营运行为的车辆。
[0006]
第一方面,本申请提供了一种识别车辆的营运行为的方法,该方法可以应用于一个地理区域,地理区域中分布有多个监控设备和多个兴趣点(point of interest,poi)。该方法可以由识别车辆的营运行为的装置(后续简称为识别装置)执行。具体的,识别装置可以获取目标时间内地理区域中的多个监控设备记录的过车数据,过车数据包括经过的车辆的信息,如车辆的车牌号码、车辆经过监控设备的时间点。然后识别装置在该多个监控设备记录的过车数据中,确定目标车辆的轨迹信息。该轨迹信息记录了目标车辆经过的多个分区,每个分区为地理区域的一部分,每个分区中包括一个或多个监控设备。然后识别装置可以确定目标车辆经过的多个分区中每个分区的poi信息,poi信息用于记录车辆经过的每个分区的poi的分布情况。识别装置可以根据车辆的轨迹信息和poi信息,得到目标车辆的行车轨迹特征。然后识别装置使用目标车辆的行车轨迹特征和分类模型,确定目标车辆为具有营运行为的车辆。
[0007]
这样,识别装置可以使用一段时间内监控设备的过车数据,确定目标车辆的轨迹信息,然后基于轨迹信息中记录的目标车辆经过的多个分区的poi信息,确定出目标车辆的行车轨迹特征,基于目标车辆的行车轨迹特征,准确的确定出目标车辆为具有营运行为的车辆。而且在不需要花费太多人力的基础上,能够高效的确定具有营运行为的车辆。
[0008]
一种可能的实现方式中,识别装置可以使用voronoi图划分地理区域,具体可以是使用分治法、扫描线算法和delaunay三角剖分算法中任一种,对地理区域进行划分,得到多
个分区,每个分区包括一个或多个监控设备。
[0009]
一种可能的实现方式中,识别装置可以在多个监控设备记录的过车数据中,确定出目标车辆经过的多个目标监控设备(目标监控设备为地理区域中的任一监控设备)、以及目标车辆经过多个目标监控设备的时间点。然后识别装置将目标车辆经过多个目标监控设备的时间点按照时间从前到后的顺序进行排序,依次将时间点与目标监控设备的标识进行对应,得到时间点与监控设备的标识的对应关系。识别装置可以将该对应关系,确定为目标时间内目标车辆的轨迹信息。
[0010]
这样,可以准确的确定出目标车辆在目标时间内的轨迹信息。
[0011]
一种可能的实现方式中,识别装置还可以确定地理区域中的多个分区中的poi的分布情况。具体可以是:识别装置可以获取地理区域内所有的poi,然后使用k均值聚类算法、层次聚类算法、基于密度的聚类算法、高斯混合模型聚类算法或者均值漂移聚类算法中的任意一种,对地理区域中的所有poi进行聚类处理,建立起poi类型与poi的对应关系。然后在地理区域的每个分区中使用该对应关系,确定该分区中每个poi对应的poi类型。识别装置可以确定该分区中各种poi类型的poi的数目,将各种poi类型的poi的数目,确定为该分区的poi信息。
[0012]
这样,提供了一种确定分区中poi的分布情况。
[0013]
一种可能的实现方式中,识别装置可以基于目标车辆的轨迹信息和目标车辆经过的多个分区的poi信息,确定出行车轨迹特征。具体处理可以是:目标车辆的轨迹信息中包括时间点与监控设备的标识的对应关系。识别装置可以在地理区域中的多个分区的poi的分布情况中,确定目标车辆经过的多个分区的poi的分布情况。分区中包括至少一个(即一个或多个)监控设备,在分区中包括一个监控设备时,可以使用一个监控设备的标识来标识一个分区,在分区中包括多个监控设备时,可以使用多个监控设备的标识来标识一个分区,或者可以使用其中一个监控设备的标识来标识分区。这样,由于分区中包括监控设备,那么分区可以对应其包括的监控设备的标识,所以可以确定出监控设备的标识对应的分区的poi信息。
[0014]
然后识别装置可以在目标车辆的轨迹信息中,依次获取时间点,确定时间点对应的监控标识,再确定监控设备的标识对应的poi信息。这样,可以建立起时间点与poi信息的对应关系,将该对应关系,确定为目标时间内目标车辆对应的行车轨迹特征,且在该对应关系中,时间点是按照时间先后顺序进行排列的。
[0015]
这样,由于行车轨迹特征中添加了经过的分区的poi信息,所以更能反映车辆经常去的地点。
[0016]
一种可能的实现方式中,在识别目标车辆的营运行为时,还可以使用目标车辆的出行特征,目标车辆的出行特征可以包括以下信息中的一种或多种:目标车辆在一段时间内的出行次数特征、目标车辆在一段时间内的出行频率特征、目标车辆的类型特征、目标车辆出行的天气特征、目标车辆出行的时间段特征。具体可以是:识别装置使用多个监控设备的过车数据,确定出目标车辆的出行特征。然后识别装置将目标车辆的行车轨迹特征和目标车辆的出行特征输入至分类模型,得到分类模型的输出结果。分类模型的输出结果可以是具有营运行为和不具有营运行为的概率。在具有营运行为的概率大于或等于不具有营运行为的概率时,可以确定目标车辆具有营运行为。在具有营运行为的概率小于不具有营运
行为的概率时,可以确定目标车辆不具有营运行为。
[0017]
这样,由于同时考虑车辆的出行特征和行车轨迹特征,所以可以使确定出的结果更准确。
[0018]
一种可能的实现方式中,分类模型可以包括第一输入子模型、第二输入子模型和全连接子模型。第一输入子模型可以为长短时记忆(long short term memory,lstm)网络、双向递归神经网络(bidirectional recurrent neural networks,brnn)、记忆网络(memory networks)中的任意一种,第二输入子模型可以是嵌入处理层。
[0019]
具体在进行识别时,识别装置可以将目标车辆的行车轨迹特征输入至第一输入子模型,输出第一输出结果,同时可以将目标车辆的出行特征输入至第二输入子模型,输出第二输出结果。然后识别装置将第一输出结果和第二输出结果进行拼接,得到拼接后的特征。最后识别装置将拼接后的特征输入至全连接子模型,根据全连接子模型的输出结果,确定目标车辆为具有营运行为的车辆。
[0020]
这样,由于同时考虑车辆的出行特征和行车轨迹特征,所以可以使确定出的结果更准确。
[0021]
一种可能的实现方式中,在识别装置确定出车辆的出行特征后,可以获取车辆营运资质信息。然后确定目标车辆的车牌号码是否存在于车辆营运资质信息中,若目标车辆的车牌号码存在于车辆营运资质信息中,则识别装置可以确定目标车辆为合法营运车辆,若目标车辆的车牌号码不存在于车辆营运资质信息中,则识别装置可以确定目标车辆为非法营运车辆。
[0022]
这样,可以基于车辆营运资质信息,判断出车辆是否是非法营运车辆,提高识别非法运营车辆的效率。
[0023]
在一种可能的实现方式中,识别装置还可以提前训练分类模型,具体是:识别装置可以确定初始分类模型,基于已知的具有营运行为的车辆和不具有营运行为的车辆的行车轨迹特征,对初始分类模型进行训练,得到分类模型。
[0024]
这样,还提供了一种训练分类模型的方式。
[0025]
第二方面,提供了一种识别车辆的营运行为的装置,该装置应用于一个地理区域,该地理区域内分布有多个监控设备和多个兴趣点poi,该装置包括:获取模块,用于获取目标时间内的多个监控设备记录的过车数据,根据过车数据确定目标车辆的轨迹信息,目标车辆的轨迹信息记录了目标车辆经过的多个分区,一个分区为地理区域中的一部分。确定模块,用于确定目标车辆经过的多个分区中的每个分区的poi信息,poi信息记录了目标车辆经过的每个分区的poi的分布情况;根据目标车辆的轨迹信息和poi信息,获得目标车辆的行车轨迹特征。识别模块,用于根据目标车辆的行车轨迹特征和分类模型,确定目标车辆为具有营运行为的车辆。
[0026]
这样,可以准确的确定出目标车辆为具有营运行为的车辆。而且在不需要花费太多人力的基础上,能够兼顾确定具有营运行为的车辆的高效性
[0027]
一种可能的实现方式中,该确定模块,还用于根据过车数据,确定目标车辆的出行特征。该识别模块,具体用于输入目标车辆的行车轨迹特征和目标车辆的出行特征至分类模型,根据分类模型的输出结果,确定目标车辆为具有营运行为的车辆。
[0028]
一种可能的实现方式中,该分类模型包括第一输入子模型、第二输入子模型和全
连接子模型;
[0029]
该识别模块,具体用于输入目标车辆的行车轨迹特征至第一输入子模型,输出第一输出结果,输入目标车辆的出行特征至第二输入子模型,输出第二输出结果;将第一输出结果和第二输出结果进行拼接,得到拼接后的特征;将拼接后的特征输入至全连接子模型,根据全连接子模型的输出结果,确定目标车辆为具有营运行为的车辆。
[0030]
一种可能的实现方式中,该确定模块,具体用于根据过车数据,确定目标车辆经过的多个目标监控设备的标识和目标车辆经过多个目标监控设备的时间点,根据目标车辆经过的多个目标监控设备的标识和目标车辆经过多个目标监控设备的时间点,确定目标车辆的轨迹信息。
[0031]
一种可能的实现方式中,该获取模块,还用于获取地理区域内的车辆营运资质信息。该确定模块,还用于根据车辆营运资质信息确定目标车辆为非法营运车辆。
[0032]
一种可能的实现方式中,该地理区域中的每个分区中包括至少一个监控设备,确定目标车辆经过的多个分区中的每个分区的poi信息之前,该确定模块,还用于对地理区域内的所有poi进行聚类,获得多个poi类型,统计地理区域中的多个分区中的poi信息。
[0033]
一种可能的实现方式中,该确定模块,具体用于根据目标车辆的轨迹信息中的监控设备的标识和poi信息中的监控设备的标识,将相同监控设备的标识对应的轨迹信息中的时间点与poi信息中poi的分布情况相关联,得到目标车辆的轨迹信息中的每个时间点对应的poi的分布情况。将每个时间点对应的poi的分布情况,按照时间的先后顺序进行排列,获得目标车辆的行车轨迹特征。
[0034]
一种可能的实现方式中,该分类模型采用深度学习模型,在输入目标车辆的行车轨迹特征至分类模型之前,该确定模块,还用于确定初始分类模型。该装置还包括训练模块,该训练模块用于根据已知的具有营运行为的车辆和不具有营运行为的车辆的行车轨迹特征对初始分类模型进行训练,获得分类模型。
[0035]
一种可能的实现方式中,该确定模块,还用于根据地理区域的地图拓扑数据和多个监控设备的地理位置信息,对地理区域进行划分,获得地理区域的多个分区,每个分区中包括至少一个监控设备。
[0036]
第三方面,提供了一种识别车辆的营运行为的计算设备,计算设备包括处理器和存储器,其中:存储器中存储有计算机指令,处理器执行计算机指令,以实现第一方面及其可能的实现方式的方法。
[0037]
第四方面,提供了一种计算机可读存储介质,其特征在于,计算机可读存储介质存储有计算机指令,当计算机可读存储介质中的计算机指令被计算设备执行时,使得计算设备执行第一方面及其可能的实现方式的方法,或者使得计算设备实现上述第二方面及其可能的实现方式的装置的功能。
[0038]
第五方面,提供了一种包含指令的计算机程序产品,当其在计算设备上运行时,使得计算设备执行上述第一方面及其可能的实现方式的方法,或者使得计算设备实现上述第二方面及其可能的实现方式的装置的功能。
附图说明
[0039]
图1是本申请一个示例性实施例提供的系统架构图;
[0040]
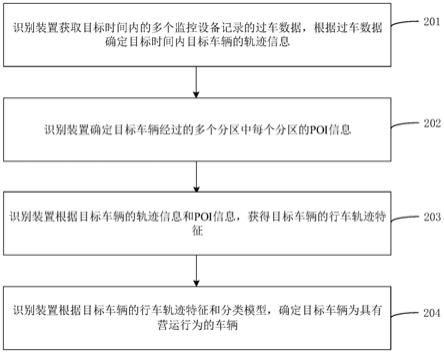
图2是本申请一个示例性实施例提供的识别车辆的营运行为的方法流程图;
[0041]
图3是本申请一个示例性实施例提供的确定分区的示意图;
[0042]
图4是本申请一个示例性实施例提供的确定轨迹信息的示意图;
[0043]
图5是本申请一个示例性实施例提供的poi分布情况的示意图;
[0044]
图6是本申请一个示例性实施例提供的确定行车轨迹特征的示意图;
[0045]
图7是本申请一个示例性实施例提供的分类模型的结构示意图;
[0046]
图8是本申请一个示例性实施例提供的lstm网络的示意图;
[0047]
图9是本申请一个示例性实施例提供的确定具有营运行为的车辆的示意图;
[0048]
图10是本申请一个示例性实施例提供的识别车辆的营运行为的装置的结构示意图;
[0049]
图11是本申请一个示例性实施例提供的识别车辆的营运行为的装置的结构示意图;
[0050]
图12是本申请一个示例性实施例提供的计算设备的结构示意图。
具体实施方式
[0051]
为使本申请的目的、技术方案和优点更加清楚,下面将结合附图对本申请实施方式作进一步地详细描述。
[0052]
为了便于对本申请实施例的理解,下面首先介绍所涉及到的名词的概念:
[0053]
1、营运行为,指从事道路客运或从事道路货运的经营活动的行为,根据车辆是否具有合法的营运资质可以分为合法营运行为和非法营运行为。
[0054]
2、合法营运,指依法取得营运权的营运行为,即按照相关规定领取有关主管部门核发的营运证件,且在核定地理范围和核定时间内进行营运的行为。
[0055]
3、合法营运车辆,指在道路客运管理部门办理了相关手续,且具有营运证件,可用于提供有偿营运服务的车辆。
[0056]
4、非法营运,指没有依法取得营运权而实施的营运行为,即未按照相关规定领取有关主管部门核发的营运证件或者超越营运证件核定的地理范围或时间有效期进行营运的行为。具体来说,非法营运可以分为非法客运和非法货运。非法客运指:1)未取得道路客运经营许可,擅自从事道路客运经营;2)使用失效、伪造、变造、被注销等无效的道路许可证件从事道路客运经营;3)超越许可事项(许可事项可以包括许可的时间段、许可的道路等),从事道路客运经营。非法货运指:1)未取得道路货物运输经营许可,擅自从事道路货物运输经营;2)使用失效、伪造、变造、被注销等无效的道路运输经营许可证件,从事道路货物运输经营;3)超越许可的事项,从事道路货物运输经营。
[0057]
5、非法营运车辆,指未在道路客运管理部门办理任何相关手续、不具有营运证件,而用于提供有偿营运服务的任何车辆,或者超越核定地理范围或核定时间,用于以有偿服务实施非法营运的任何车辆。车辆的类型可以包括摩托车、三轮车、小汽车、小客车、大型游览观光车、救护车等,车辆的营运范围可以是市区接送或国道客运。只要不是按照当地相关交通法规而非法营运的车辆,皆称为是非法营运车辆。例如,对于a车辆,在没有领取到载客资格证的情况下,进行了收费载客行为,那么a车辆即为非法营运车辆。再例如,b车辆核定的地理范围为用于载客从a城市到b城市,但是b车辆被用于载客从a城市到c城市,那么b车
辆在从a城市到c城市的营运过程中即为非法营运车辆。
[0058]
6、监控系统,监控系统是监控交通区域中的车辆行驶信息,并进一步对车辆行驶信息进行处理,获得监控数据的系统。监控系统包括监控设备和处理系统。在本申请实施例中,从监控系统中获得的数据称为监控数据,监控数据包括多个路口或路段的过车数据,每个路口或路段的过车数据是经过设置于该路口或路段的监控设备记录的、再经处理系统分析后获得的数据。过车数据包括经过该监控设备所在位置的车辆的信息(如车牌、时间、一个或多个时间段内经过监控设备所在位置的车辆数量等)。
[0059]
本申请实施例中监控系统可以是卡口监控系统,卡口监控系统用于对经过交通区域中的特定场所(如收费站、交通或治安检查站、路口、路段等)的车辆进行监控。卡口监控系统包括多个卡口设备和处理系统,其中,卡口设备设置在路口或路段的某个位置,用于监控经过该位置的车辆,卡口设备可以是能够捕捉到图像或影像的设备,如摄像头,或相机等;处理系统可以获取卡口设备捕捉的图像或影像,通过深度学习算法识别卡口设备捕捉到的图像或影像中的车辆的车牌、车型、车辆数量,另外还可以记录经过的时间等信息。处理系统可以是一个运行在计算设备上的软件系统,处理系统可以部署在靠近卡口设备的服务器中,也可以部署在远端服务器上。卡口监控系统中处理系统处理后的数据可以作为卡口监控系统的监控数据。
[0060]
在一个交通区域内,可以只在一些路口设置卡口设备,如可以在该交通区域内的主干路段、交通容易拥堵的路段、事故发生密集的路段以及在关键路口处设置卡口设备。在路口上设置的卡口设备可以拍摄到经过该路口的所有车道的车辆。例如,该路口的卡口设备的视角(拍摄范围)可以覆盖该路口的所有车道。在路口上设置的卡口设备也可以只拍摄经过该路口部分车道上的车辆。例如,该路口上卡口设备的视角(拍摄范围)可以只覆盖该路口部分方向的车道。
[0061]
需要说明的是,在本申请实施例中以监控系统为卡口监控系统为例进行说明。事实上,监控系统还可以是电子警察系统,电子警察系统可以对经过交通区域中的路口的车辆进行监控,识别出车辆的信息,进一步确定可能存在的交通违规情况以及发生的交通事故等。
[0062]
电子警察系统包括电子警察监控设备和分析处理系统,电子警察监控设备记录的数据的内容与卡口设备捕捉的数据的内容类似,分析处理系统分析、处理后的数据与卡口监控系统的处理系统处理后的数据也类似。具体的,分析处理系统分析、处理后的数据也可以包括经过电子警察监控设备所在路口的车辆的车牌会让记录经过的时间等,还可以包括车辆车型、一个或多个时间段内经过电子警察监控设备所在路口的车辆数量。电子警察系统的监控数据包括分析处理系统对多个电子警察监控设备记录的数据进行分析、处理后的数据。
[0063]
作为一种可能的实施方式,也可以将电子警察监控系统中分析处理系统分析、处理后的数据与卡口监控系统的处理系统处理后的数据进行对应融合,将融合后的数据作为监控数据。
[0064]
在本申请实施例中,以监控系统为卡口监控系统为例进行说明,对于监控系统为电子警察系统(相应的,监控数据为电子警察系统的监控数据),或监控系统为由卡口监控系统和电子监察系统组合构成的系统(相应的,监控数据为融合后的监控数据)的情况,与
监控系统为卡口监控系统的情况类似,此处不再赘述。
[0065]
7、兴趣点(point of interest,poi),指地理区域上的地点标识,地点标识用以标示出该地点标识所在地所代表的政府部门、各行各业之商业机构(加油站、百货公司、超市、餐厅、酒店、便利商店、医院等)、旅游景点(公园、公共厕所等)、古迹名胜、交通设施(各式车站、停车场、超速照相机、速限标示)等处所。每个兴趣点包含名称、类型和位置信息等,位置信息可以是经纬度、海拔等,类型可以是餐饮、住宿等。
[0066]
8、深度学习(deep learning),是机器学习(machine learning)领域中一个分支,深度学习是学习样本数据的内在规律和表示层次,这些学习过程中获得的信息对诸如文字,图像和声音等数据的解释有很大的帮助。它的最终目标是让机器能够像人一样具有分析学习能力,能够识别文字、图像和声音等数据。深度学习是一个复杂的机器学习算法。
[0067]
为了维护道路运输市场的秩序以及避免运输中的危险情况,通常会核查非法营运车辆,在核查非法营运车辆时,首先要确定具有营运行为的车辆。在确定具有营运行为的车辆时,主要通过交通执法部门出动执法人员对道路上具有营运行为的车辆进行识别。但是人工执法会存在多个缺点,缺点一,具有营运行为的车辆存在较大的隐蔽性(如在查处到具有营运行为的车辆时,虽然找到了车主,车内也有乘客,不但车主不承认营运,而且乘客会出于各种想法,不自觉的包庇车主),导致识别营运车辆的准确性比较低。缺点二,具有营运行为的车辆的数量巨大,人工执法很难全部查到。所以需要提供一种有效的从大量的车辆中识别车辆的营运行为的方法。在对本申请实施例提供的识别车辆的营运行为的方法介绍之前,对本申请实施例所适用的系统架构进行介绍。
[0068]
本申请实施例提供的识别车辆的营运行为的方法,可以应用于识别一个地理区域中的车辆的营运行为,该地理区域可以是一个城市或者一个城市中的一片区域等。识别车辆的营运行为的方法可以由识别车辆的营运行为的装置(后续可以简称为是识别装置)执行。识别装置既可以是一个硬件装置,如服务器、终端计算设备等,也可以是一个软件装置(如可以为运行在硬件装置上的一套软件程序)。示例性的,如图1所示,识别装置可以运行在云计算设备系统(可以包括至少一个云计算设备,如服务器等),也可以运行在边缘计算设备系统(可以包括至少一个边缘计算设备,如服务器、台式电脑等),还可以运行在各种终端计算设备上(如笔记本电脑、个人台式电脑等)。
[0069]
识别装置在逻辑上也可以是由各个部分构成的装置,如识别装置可以包括确定模块、识别模块。识别装置中的各个组成部分可以分别部署在不同的系统或者服务器中。识别装置的各个部分可以分别运行在云计算设备系统、边缘计算设备系统、终端计算设备中的任意两个中。云计算设备系统、边缘计算设备系统和终端计算设备之间由通信通路连接,可以互相进行通信和数据传输。
[0070]
下面将结合图2对本申请实施例提供的识别车辆的营运行为的方法进行说明,该方法可以由识别装置执行,且要识别一个地理区域中目标时间内的车辆的营运行为。如图2所示,该方法的处理流程如下:
[0071]
步骤201,识别装置获取目标时间内的多个监控设备记录的过车数据,根据过车数据确定目标时间内目标车辆的轨迹信息。
[0072]
其中,目标车辆的轨迹信息记录了目标车辆经过的多个分区。分区为地理区域中的一部分,地理区域包括多个分区,每个分区可以包括一个或多个监控设备,每个分区可以
使用该分区内包括的监控设备的标识来表示。
[0073]
目标车辆为被监控设备拍摄到的任一车辆。目标时间可以预设,可以存储在识别装置,可以是30天(2019.7.1至2019.8.1)等。步骤201中的技术细节在后文中进行描述。
[0074]
步骤202,识别装置确定目标车辆经过的多个分区中每个分区的poi信息。
[0075]
其中,对于任一分区,该分区的poi信息记录了该分区的各种poi类型的poi的分布情况。例如,对于任一分区,该分区的poi信息为该分区中各种poi类型的poi的数目。再例如,对于任一分区,该分区的poi信息为该分区中各种poi类型的poi占该分区中poi总数目的比例。步骤202的技术细节在后文中进行描述。
[0076]
步骤203,识别装置根据目标车辆的轨迹信息和poi信息,获得目标车辆的行车轨迹特征。步骤203的技术细节在后文中进行描述。
[0077]
步骤204,识别装置根据目标车辆的行车轨迹特征和分类模型,确定目标车辆为具有营运行为的车辆。
[0078]
其中,分类模型用于识别车辆是否是具有营运行为的车辆。步骤204的技术细节在后文中进行描述。
[0079]
作为一种可能的实施方式,识别装置还可以获取目标车辆的出行特征,相应的在步骤204中,识别装置可以根据目标车辆的行车轨迹特征、目标车辆的出行特征和分类模型,确定目标车辆为具有营运行为的车辆。
[0080]
进一步的,本申请实施例提供的方法获取到具有营运行为的车辆的数据后,可以将具有营运行为的车辆的数据,用于交通管理部门对非法营运车辆进行识别和打击,具体可以为:
[0081]
识别装置获取地理区域内的车辆营运资质信息,根据车辆营运资质信息确定目标车辆为非法营运车辆。识别非法营运车辆的技术细节在后文中进行描述。
[0082]
在详细介绍图2所示的各个步骤中的过程之前,首先介绍一下步骤204中提到的目标车辆的出行特征:
[0083]
目标车辆的出行特征可以包括以下的一种或多种:目标车辆在一段时间内的出行次数特征、目标车辆在一段时间内的出行频率特征、目标车辆的类型特征、目标车辆出行的天气特征、目标车辆出行的时间段特征。其中:
[0084]
目标车辆在一段时间内的出行次数特征可以通过以下一个或多个方面反映:一段时间内每天经过至少一个监控设备的累加次数、一段时间内目标车辆每天经过至少一个监控设备的累加次数的分布等。
[0085]
一段时间内每天经过至少一个监控设备的累加次数:对于每天,确定该天目标车辆经过的至少一个监控设备,然后确定经过该至少一个监控设备的次数。将经过至少一个监控设备的次数相加,得到目标车辆该天经过至少一个监控设备的累加次数。例如,某一天目标车辆经过第一监控设备两次,经过第二监控设备三次,那么该天目标车辆经过至少一个监控设备的累加次数即为五次。可见目标车辆每天经过监控设备的累加次数为一个数值,所以一段时间内每天经过至少一个监控设备的累加次数是一个一维向量。需要说明的是,为了方便计算,此处数值的范围有一个上限,上限可以是1000,这样,即使目标车辆某天被至少一个监控设备记录的次数总和为1200,记录的目标车辆该天经过至少一个监控设备的累加次数也是1000。
[0086]
一段时间内目标车辆每天经过至少一个监控设备的累加次数的分布:对于一段时间内的每天,确定该天目标车辆经过的至少一个监控设备,然后确定经过该至少一个监控设备的次数。将经过至少一个监控设备的次数相加,得到目标车辆该天经过至少一个监控设备的累加次数。使用这种方法,即可确定出一段时间内目标车辆每天经过至少一个监控设备的累加次数。然后依照时间先后顺序,将一段时间内目标车辆每天经过至少一个监控设备的累加次数进行排序,得到一组向量,向量的维度为一段时间的长度(以天为单位),这一组向量即为一段时间内目标车辆每天经过至少一个监控设备的累加次数的分布。例如,一段时间为31天,目标车辆每天对应一个数值,那么目标车辆一段时间内每天经过至少一个监控设备的累加次数的分布为一组31维向量。再例如,一段时间为一周,目标车辆每天对应一个数值,那么目标车辆一周中每天经过至少一个监控设备的累加次数的分布为一组7维向量。
[0087]
目标车辆在一段时间内的出行频率特征:可以是一段时间段内出行天数占一段时间总天数的比例,用一维向量表示。
[0088]
目标车辆的车辆类型特征:根据不同的分类方式,确定车辆类型特征,例如,按照车辆的种类进行分类,可以分为卡车、轿车、跑车等,或者按照车辆的厂商进行分类,可以分为a车、b车等。不同的车辆类型对应有不同的数字标签值,例如:数字标签值可以为1~300中的任一数值。也就是说对于任一车辆可以使用一个数值表示该车辆的车辆类型特征,那么车辆类型特征用一维向量表示。
[0089]
目标车辆出行的天气特征:出行的天气可以包括晴天、多云、阴天、雨雪天。统计一段时间内目标车辆出行的各种天气下的出行天数,即得到一段时间内目标车辆出行的天气特征。例如,一段时间内为7天,晴天出行2天,阴天出行2天,雨雪天出行3天,那么一段时间内目标车辆出行的天气特征为(2,0,2,3),应理解,天气特征向量中的天气类型的排序可以预先设置,每个目标车辆的天气特征中的数值均只按照一种预先设置的顺序进行排列。需要说明的是,此处获取目标车辆出行的天气的方式可以为:识别装置获取目标车辆一段时间内每天经过第一个监控设备的时间点,使用该时间点所属的日期,从天气应用程序中,获取出行的天气。
[0090]
目标车辆出行的时间段特征:目标车辆出行的时间段特征可以包括如下的一种或多种:一段时间内每天第一次经过监控设备的时间段、一段时间内每天最后一次经过监控设备的时间段、一段时间内每天第一次经过监控设备的时间段分布、一段时间内每天最后一次经过监控设备的时间段分布。以下分别进行说明:
[0091]
一段时间内每天第一次经过监控设备的时间段指:每天第一次经过监控设备的时间点所属的时间段。为了统一时间可以进行如下处理:一天为24*60分钟,以15分钟为间隔,可以分为96个时间段,使用独热编码(one-hot encoding)的方式,可以编码为一组96维的向量。在96维的向量中,除了第一次经过监控设备的时间点所属的时间段的位置取值为1,其余位置都取值为0。例如,目标车辆早上5:10第一次经过监控设备,早上5:10属于第21个时间段,那么第21个时间段处的位置处取值为1,96维向量中除第21个时间段处,其余时间段的位置处取值均为0,相应的,96维向量中,除了第21维取值为1,其余维取值均为0。
[0092]
一段时间内每天最后一次经过监控设备的时间段指:与一段时间内每天第一次经过监控设备的时间段类似,只不过是将第一次改为最后一次即可,也为96维的向量,此处不
再赘述。
[0093]
一段时间内每天第一次经过监控设备的时间段分布指:一天为24*60分钟,以15分钟为间隔,可以分为96个时间段。统计目标车辆在一段时间内每天第一次出现在监控设备的时间点所属的时间段,然后统计一段时间内每天第一次出现在监控设备的时间点所属的各个时间段的数目,所以一段时间内每天第一次经过监控设备的时间段分布为96维的向量。例如,一段时间为31天,目标车辆有15天中第一次经过监控设备的时间点都落在7:01至7:15的时间段中,目标车辆有16天第一次经过监控设备的时间点都落在7:31至7:45的时间段中,那么目标车辆在一段时间内每天第一次经过监控设备的时间分布的96维向量中,第25维位置的取值为15,第27维取值为16,其余维取值均为0。
[0094]
一段时间内每天最后一次经过监控设备的时间段分布,与一段时间内每天第一次经过监控设备的时间段分布类似,只不过是将第一次改为最后一次即可,也为96维的向量,此处不再赘述。
[0095]
需要说明的是,上述的一段时间可以与目标时间完全相同(如均为6月1日至7月1日),也可以与目标时间不完全相同(如上述一段时间为6月1日至7月1日,目标时间为6月15日至7月1日等)。
[0096]
应理解,对于前述目标车辆的每一种出行特征的表示方式,本申请不作任何限定,但是在对本申请中的所有的目标车辆进行构建出行特征时,每一个目标车辆的每一种出行特征的表示方式应保持一致,例如:对于每一辆目标车辆的天气特征采用统计一段时间内目标车辆出行的各种天气下的出行天数来确定,且天气特征中只统计晴天、多云、阴天、雨雪天四种情况,天气特征中的每个数值的排序为(n天中晴天的天数,n天中多云的天数,n天中阴天的天数,n天中雨雪天的天数),其中n为大于0的正整数。则在本申请提供的方案中,对每一辆车构建出行特征中的天气特征时,均采用上述表示方式。
[0097]
在详细介绍图2所示的各个步骤中的过程之前,再介绍一下获取地理区域的分区的过程。有多种方式可以获取地理区域的分区的过程,本申请实施例提供以下两种方式,处理如下:
[0098]
方式一,根据地理区域的地图拓扑数据和多个监控设备的地理位置信息,对地理区域进行划分,获得地理区域的多个分区,每个分区中包括一个或多个监控设备。
[0099]
其中,地理位置信息可以是经纬度。以下以一个分区中包括一个监控设备为例进行说明。
[0100]
本实施例中,若地理区域的地图拓扑数据中标定有监控设备的地理位置信息,则识别装置可以在地图拓扑数据中,获取地理区域中所包括的多个监控设备的地理位置信息。若地理区域的地图拓扑数据中未标定有监控设备的地理位置信息,则识别装置可以从其他设备获取地理区域中多个监控设备的地理位置信息。然后识别装置使用多个监控设备的地理位置信息,确定出地理区域的多个分区。例如,地理区域使用voronoi图表示,voronoi图由一组由连接两邻点直线的垂直平分线组成的连续多边形组成。n个在平面上有区别的点,按照最邻近原则划分平面,每个点与它的最近邻区域相关联。得到voronoi图的方式有多种,如分治法、扫描线算法和delaunay三角剖分算法等。
[0101]
假设使用delaunay三角剖分算法确定得到voronoi图,首先会得到delaunay三角网,然后识别装置可以找出与每个监控设备所在位置点相邻的所有三角形。也即是找出具
有一个相同顶点的所有三角形。例如,如图3所示,假设一个监控设备所在位置点为o,找出以o为顶点的一个三角形mno,取三角形mno除o顶点之外的另一顶点m,顺时针的下一个三角形以on为边。若该下一个三角形的另一个顶点为q,则三角形onq的下一个三角形以oq为边。以此进行,直到回到om边,得到三角形omn、三角形onq、三角形oqp、三角形opu、三角形our和三角形orm,这样,以o为顶点的三角形,即为o相邻的三角形。
[0102]
然后识别设备确定每个监控设备所在位置点相邻的三角形的外接圆圆心。对于每个监控设备所在位置点,识别装置连接每个监控设备所在位置点相邻的三角形的外接圆圆心,得到每个监控设备所属的一个区域。每个区域即为一个分区,每个分区中包括一个监控设备。这样,也就得到地理区域中的分区。
[0103]
此处需要说明的是,由于有些监控设备靠近地理区域的边界,所以使用上述方式这些监控设备有可能不会形成所属的区域,识别装置可以在地理拓扑区域中,确定地理区域的边界。然后取地理区域的边界区的delaunay三角网中的三角形的垂直平分线,将垂直平分线与地理区域的边界相交,形成监控设备所属的区域。
[0104]
方式二:从其他设备获取地理区域中分区的过程可以如下:
[0105]
识别装置可以向其他设备发送地理区域的分区获取请求,该分区获取请求中携带有地理区域的标识。其他设备接收到该分区获取请求后,可以使用地理区域的标识,查找到该地理区域的分区信息。然后其他设备向识别装置发送该地理区域的分区的信息。这样,识别装置也可以从其他设备获取到分区。
[0106]
需要说明的是,分区中包括一个监控设备的情况可以为:任意两个监控设备之间的距离比较远,如距离大于或一定数值(一定数值是一个比较大的数值,如一千米等)。分区中包括多个监控设备的情况可以为:分区中包括的监控设备之间的距离比较近,如距离小于一定数值(一定数值是一个比较小的数值,如一千米等)。
[0107]
对于分区中包括多个监控设备的情况,在使用方式一划分地理区域中的分区时,可以首先将距离小于一定数值的监控设备进行合并,得到一个虚拟监控设备,然后确定合并得到虚拟监控设备的所有监控设备的中间位置点。将该中间位置点的地理位置信息作为虚拟监控设备的地理位置信息,执行上述方式一的处理,得到虚拟监控设备所属的区域。该区域即为一个分区,该分区包括合并得到虚拟监控设备的所有监控设备。
[0108]
另外,在监控设备之间的距离比较近时,还有可能出现分区之间有重叠的区域。
[0109]
以下将针对图2所示的各个步骤中的过程进行详细描述:
[0110]
识别装置在执行步骤201时,如图4所示,按照如下步骤进行执行:
[0111]
步骤2011,识别装置获取多个监控设备记录的过车数据。
[0112]
本实施例中,识别装置可以向监控系统发送目标时间内过车数据的获取请求。监控系统接收到该获取请求后,可以向识别装置发送目标时间内多个监控设备记录的过车数据。
[0113]
另外,若监控系统周期性向识别装置发送监控设备记录的过车数据,则识别装置中存储有监控设备记录的过车数据。这样,识别装置可以在自身的存储空间中,获取地理区域中目标时间内多个监控设备记录的过车数据。
[0114]
步骤2012,识别装置根据过车数据,确定目标时间内目标车辆经过的多个目标监控设备的时间点。
[0115]
其中,多个目标监控设备是地理区域中的多个监控设备中的部分监控设备或者全部监控设备。在多个目标监控设备为部分监控设备时,说明目标车辆没有经过地理区域中的全部监控设备,在多个目标监控设备为全部监控设备时,说明目标车辆经过地理区域中的全部监控设备。
[0116]
本实施例中,识别装置可以在过车数据中,使用目标车辆的标识(该标识可以是目标车辆的车牌号码),确定目标时间内目标车辆经过的多个目标监控设备,以及分别经过该多个目标监控设备时的时间点。
[0117]
步骤2013,识别装置根据目标车辆经过的多个目标监控设备的标识和目标车辆经过多个目标监控设备的时间点,确定目标车辆的轨迹信息。
[0118]
本实施例中,识别装置可以将目标车辆经过多个目标监控设备的时间点,按照先后顺序(即时间从前到后的顺序)进行排列。然后识别装置将先后顺序排列的时间点与记录每个时间点的目标监控设备的标识相对应,得到时间点与监控设备的标识的对应关系,且在该对应关系中,时间点是按照先后顺序进行排列,如表一所示,时间点为2019-5-21-7:00、2019-5-21-7:15、2019-5-21-7:30,分别对应标识1、标识2和标识3等。识别装置将该时间点与监控标设备的识的对应关系,确定为目标时间内目标车辆的轨迹信息。
[0119]
表一(时间点与监控设备的标识的对应关系)
[0120]
时间点监控设备的标识(分区)2019-5-21-7:00标识12019-5-21-7:15标识22019-5-21-7:30标识3
……
[0121]
识别装置在执行上述步骤202之前,如图5所示,还会确定地理区域中的多个分区的poi信息,处理如下:
[0122]
步骤2021,识别装置对地理区域内的所有poi进行聚类,获得多个poi类型。
[0123]
本实施例中,识别装置可以获取地理区域中所有poi,然后使用k均值聚类算法、层次聚类算法、基于密度的聚类算法、高斯混合模型聚类算法或者均值漂移聚类算法中的任意一种,对地理区域中的所有poi进行聚类处理,建立起poi类型与poi的对应关系。然后识别装置将poi类型与poi的对应关系进行存储。例如,可以将酒店、宾馆、旅馆等用于住宿的poi聚类为一类,可以将中餐馆、西餐馆、快餐馆等用于提供熟食的poi聚类为一类等。
[0124]
步骤2022,识别装置统计地理区域的多个分区中的poi的分布情况。
[0125]
本实施例中,对于地理区域中的多个分区中的任一分区,识别装置可以使用poi类型与poi的对应关系,确定该分区中每个poi对应的poi类型。然后识别装置确定该分区中各种poi类型的poi的数目,将各种poi类型的poi的数目,确定为该分区的poi的分布情况。例如,poi类型为16种,依次为poi类型1、poi类型2、
…
、poi类型16,对于分区1,包括三种poi类型的poi,poi类型1的兴趣点的数目为10,poi类型3的兴趣点的数目为8,poi类型5的poi的数目为5,分区1的poi的分布情况为(10,0,8,0,5,0,0,
…
,0)。
[0126]
或者,对于地理区域的多个分区中的任一分区,识别装置可以确定该分区中所有poi的总数目,并且确定该分区中各种poi类型的poi的数目。识别装置可以计算各种poi类型的poi的数目占该分区中所有poi的总数目的比例。将各种poi类型的poi对应的比例,确
定为该分区的poi的分布情况。例如,poi类型为16种,依次为poi类型1、poi类型2、
…
、poi类型16,对于分区1,包括三种poi类型的poi,poi类型1的poi的数目为10,poi类型3的poi的数目为8,poi类型5的poi的数目为5。poi类型1的poi的比例为10/23,poi类型2的poi的比例为8/23,poi类型5的poi的比例为5/23,其余poi类型的poi的比例均为0。分区1的poi的分布情况为(10/23,0,8/23,0,5/23,0,0,
…
,0)。
[0127]
这样可以得到地理区域中的多个分区中的poi的分布情况。
[0128]
后续在执行步骤202时,识别装置可以根据目标车辆经过的多个分区,确定目标车辆经过的多个分区中每个分区的poi的分布情况,具体处理为:
[0129]
识别装置可以确定目标车辆经过的多个分区中的监控设备的标识。对于每个分区,识别装置将该分区中的监控设备的标识与该分区的poi的分布情况相对应,得到监控设备的标识与poi的分布情况的对应关系,如表二所示。识别装置将该对应关系,确定为该分区的poi信息。按照这种方式,可以确定出每个分区的poi信息。
[0130]
表二(监控设备的标识与poi的分区情况的对应关系)
[0131]
监控设备的标识(分区)poi的分布情况标识1(8,1,2,0,5,0,0,
…
,0)标识2(4,0,8,0,5,0,7,
…
,0)标识3(6,6,8,0,5,3,4,
…
,8)
……
[0132]
此处需要说明的是,若一个分区中包括多个监控设备,则会出现该分区中的多个监控设备对应一种poi的分布情况。
[0133]
另外,本实施例也可以从其他设备提前获取poi类型与poi的对应关系,在获取poi类型与poi的对应关系的对应关系时,会获取到两个对应关系,基于这两个对应关系合并得到poi类型与poi的对应关系。这两个对应关系中,第一个对应关系是poi的标识、poi的名称与poi类别代码的对应关系,如表三所示。第二个对应关系是poi类型划分的对应关系,即poi类型、poi的第一分类、poi的第二分类和poi的类别代码的对应关系,如表四所示。
[0134]
表三(poi的标识、poi的名称与poi类别代码的对应关系)
[0135]
poi的标识poi的名称poi类别代码1051960
×××
派出所1902021095124
×××
银行分理处1501011098228
×××
酒店1201011308729
×××
房地产开发公司240105
………
[0136]
表四(poi类型划分的对应关系)
[0137][0138][0139]
需要说明的是,在本申请的一种实施例中poi所属的poi类型可以有16种,如餐饮、住和宿、批发和零售、汽车销售及服务、金融和保险、教育和文化、卫生和社保、运动和休闲、公共设施、商业设施和商务服务、居民服务、公司企业、交通运输和仓储、科研及技术服务、农林牧渔业、自然地地名。由于poi类型比较多,本申请实施例的表三中不一一示出。本申请实施例中仅是示例性的提供了一种示例性的poi类型的划分方法,其他poi类型的划分方法也适用于本申请实施例中。
[0140]
通过上述描述,即可得到目标车辆经过的各监控设备所在的分区的poi的分布情况,目标车辆经过的每个分区的poi的分布情况可以表示为一组一维向量。对于目标车辆在目标时间内经过相同的分区,不会进行合并,而是将每次经过该分区的poi的分布情况分别列出(这是由于轨迹信息用于描述的车辆的行驶轨迹,所以要求依次记录经过的每个分区的poi的分布情况)。例如,假设每个分区包括一个监控设备,2019年8月3日,7时20分经过第一监控设备,2019年8月3日,20时20分又经过第一监控设备,在目标车辆的轨迹信息中会包括两个记录,即7时20分一个记录,20时20分一个记录。不进行合并,可以使得poi信息更能反映目标车辆的运行特点,有利于对目标车辆的营运行为的判断。
[0141]
本申请实施例中,如图6所示,提供了步骤203的处理过程:
[0142]
步骤2031,识别装置根据监控设备的标识,将相同监控设备的标识对应的轨迹信息中的时间点与poi信息中poi的分布情况相关联,得到目标车辆的轨迹信息中的每个时间点对应的poi的分布情况。
[0143]
本实施例中,在图4所示的流程中确定出目标车辆的轨迹信息,轨迹信息中包括时间点与监控设备的标识的对应关系。在图5所示的流程中确定出目标车辆的poi信息,poi信息中包括目标车辆经过的分区中各种poi类型的poi的分布情况,且目标车辆经过的每个分
区包括一个监控设备。
[0144]
识别装置可以在轨迹信息中获取一个时间点,使用该时间点,在轨迹信息中,确定该时间点对应的监控设备的标识。然后识别装置可以使用该监控设备的标识,在目标车辆的poi信息中,获取该监控设备的标识对应的各种poi类型的poi的分布情况。然后识别装置将该监控设备的标识对应的时间点和各种poi类型的poi的分布情况,进行关联,得到时间点与poi的分布情况的关联关系。这样,对于目标车辆的轨迹信息中每个时间点,均对应有poi的分布情况。
[0145]
步骤2032,识别装置将每个时间点对应的poi的分布情况,按照时间的先后顺序进行排列,获得目标车辆的行车轨迹特征。
[0146]
本实施例中,识别装置可以将目标车辆的轨迹信息中的每个时间点,按照先后顺序进行排列。然后按照时间点的先后顺序将每个时间点对应的poi的分布情况进行排列,得到目标车辆的行车轨迹特征。
[0147]
这样,目标车辆的行车轨迹特征中包括时间点和poi的分布情况,如表五所示。
[0148]
表五(行车轨迹特征)
[0149]
时间点poi的分布情况2019-5-21-7:00(8,1,2,0,5,0,0,...,0)2019-5-21-7:15(4,0,8,0,5,0,7,...,0)2019-5-21-7:30(6,6,8,0,5,3,4,...,8)......
[0150]
另外,上述表五仅为一种示例,目标车辆的行车轨迹特征中还可以包括监控设备的标识、监控设备的位置信息等。另外还可以包括目标车辆经过监控设备的车辆行驶方向、目标车辆经过监控设备时的车道号等。
[0151]
在步骤203中确定出目标车辆的行车轨迹特征之后,在步骤204中,识别装置可以获取分类模型,分类模型可以包括第一输入子模型和全连接子模型。第一输入子模型可以是为lstm网络、brnn、记忆网络中的任意一种。第一输入子模型用于提取目标车辆的轨迹抽象特征(即后面提到的第一输出结果)。全连接子模型可以使用标准隐藏层,依次进行矩阵乘法、偏差计算和非线性激活函数等,非线性激活函数可以使用修正线性单元(rectified linear units,relu)函数,relu函数的表达式可以为f(x)=max(0,x)。全连接子模型用于基于目标车辆的轨迹抽象特征,输出目标车辆具有营运行为的概率和目标车辆不具有营运行为的概率。或者全连接子模型用于基于目标车辆的轨迹抽象特征,输出目标车辆是否是具有营运行为的车辆。
[0152]
这样,识别装置可以将目标车辆的行车轨迹特征输入到分类模型的第一输入子模型,得到第一输出结果,其中,第一输出结果为第一输入子模型对行车轨迹特征进行进一步特征提取后获得的轨迹抽象特征。然后将第一输出结果输入全连接子模型,得到全连接子模型的输出结果。使用全连接子模型的输出结果,确定目标车辆是否是具有营运行为的车辆。这样,由于可以基于行车轨迹特征直接确定目标车辆是否是具有营运行为的车辆,而不需要人工确定,所以可以节约大量的人力。
[0153]
需要说明的是,本申请实施例中能使用车辆的行车轨迹特征判断车辆是否具有营运行为,这是由于行车轨迹特征中包括目标车辆经过监控设备所在分区的poi的分布情况,
而poi的分布情况恰好可以反映车辆常去的区域的类型,基于车辆常去的区域的类型,即可以反映车辆是否具有营运行为。例如,车辆经包含交通运输类型的poi(如火车站、机场、汽车站等)的分区比较多,说明车辆具有营运行为的可能性比较大。
[0154]
在本申请实施例中的步骤204中,为了更准确的得到目标车辆是否具有营运行为,还可以使用目标车辆的出行特征作分类模型的输入。
[0155]
在分类模型的输入还包括目标车辆的出行特征时,分类模型可以包括第一输入子模型、第二输入子模型、全连接子模型。第一输入子模型可以是lstm网络、brnn、记忆网络中的任意一种,第二输入子模型可以是嵌入处理层。第一输入子模型用于输入行车轨迹特征,用于提取目标车辆的轨迹抽象特征(即后面提到的第一输出结果)。第二输入子模型用于输入出行特征,用于提取目标车辆的出行抽象特征(即后面提到的第二输出结果)。全连接子模型用于基于目标车辆的轨迹抽象特征和出行抽象特征,输出目标车辆具有营运行为的概率和目标车辆不具有营运行为的概率。或者全连接子模型用于基于目标车辆的轨迹抽象特征和出行抽象特征,输出目标车辆是否是具有营运行为的车辆。
[0156]
如图7所示,本申请实施例中的分类模型中全连接子模型中包括三个全连接层,每个全连接层包括三个神经元、第一输入子模型采用lstm网络,第二输入子模型采用嵌入处理层。另外,全连接子模型中全连接层也可以采用其他数目个,每个全连接层的神经元也可以是其他数目个,本申请实施例不做限定。需要说明的是,在lstm网络中,为了更清楚的表示出lstm网络的思想,所以图7示出了多个lstm单元(图7中第一输入子模型中每个圆表示一个lstm单元),实际上仅有一个lstm单元,循环进行输入行车轨迹特征中的各时间点对应的poi的分布情况。
[0157]
接下来对lstm网络的结构和原理进行大致描述:
[0158]
lstm网络是一种时间递归神经网络。如图8所示,lstm网络中包括lstm单元,lstm单元包括遗忘门(forget gate)、输入门(input gate)和输出门(output gate)三个门。lstm单元包括的遗忘门用于决定忘记的信息,lstm单元的输入门用于决定更新的信息,lstm单元的输出门用于决定输出值。实际上lstm网络中仅有一个lstm单元,但是为了描述清楚,图8中示出了三个lstm单元,第一个lstm单元的输入是t-1时刻的输入,第二个lstm单元的输入是t时刻的输入,第三个lstm单元的输入是t+1时刻的输入,第一个lstm单元、第二个lstm单元和第三个lstm单元的结构完全相同。lstm网络的核心在于细胞(cell)(细胞为图8中的大方框)的状态和图8中横穿的水平线,细胞的状态(即图8中的c
t-1
和c
t
)像一条传送带,从整个细胞中穿过,只是做了少量的线性操作。这样可以实现信息从整个细胞中穿过而不做改变,进而可以实现长时的记忆保留。
[0159]
lstm网络包括一个lstm单元,lstm单元每次进行输出后,若还有时间点的poi的分布情况没有输入lstm单元,则将本次的输出和未输入lstm单元的下一个时间点的poi的分布情况输入lstm单元,直到lstm单元某次输出后,没有要输入lstm单元的poi的分布情况存在,本次lstm单元的输出则为lstm网络的输出。
[0160]
上述是对lstm网络中的lstm单元的简单描述,接下来对嵌入处理层进行简单描述:
[0161]
嵌入处理层用于将目标车辆的出行特征,转换为统一特征维度的向量。例如,出行特征为30维。将30维转换为10维。
[0162]
目标车辆的出行特征不止一种,对于每种出行特征,可以训练一个嵌入映射矩阵。对于每种出行特征,后续通过嵌入映射矩阵,将出行特征转换为统一特征维度的向量。例如,统一特征维度的向量为10维,原始出行特征是7*1的矩阵,嵌入映射矩阵为10*7的矩阵,识别装置将1*7的矩阵乘以一个10*7的矩阵,即可得到10*1的矩阵,10*1的矩阵中包括10维向量。
[0163]
基于图8,本申请实施例中,在步骤204中,使用目标车辆的行车轨迹特征和出行特征,确定目标车辆的是否具有营运行为的处理流程可以如图9所示:
[0164]
步骤2041,识别装置输入目标车辆的行车轨迹特征至第一输入子模型,输出第一输出结果。
[0165]
本实施例中,目标车辆的行车轨迹特征包括目标时间内目标车辆经过监控设备的时间点、以及该监控设备所在的分区的poi的分布情况,且经过监控设备的时间点是按照时间的先后顺序进行排列。
[0166]
识别装置可以将目标时间内行车轨迹特征输入到第一输入子模型。具体在输入时,将第一个时间点对应的poi的分布情况输入到lstm单元中,得到当前lstm单元输出的细胞状态c
t1
和h
t1
。然后识别装置将h
t1
、c
t1
和第二个时间点对应的poi的分布情况再输入到lstm单元中,得到当前lstm单元输出的细胞状态c
t2
和h
t2
。然后识别装置将c
t2
、h
t2
和第三个时间点对应的poi的分布情况再输入到lstm单元中,得到当前lstm单元输出的c
t3
和h
t3
。以此类推,得到输入第n个时间点对应的poi的分布情况时,当前lstm单元的输出h
tn
,作为整个lstm网络的输出,其中,第n个时间点为行车轨迹特征中最大的时间点。这样,就得到第一输入子模型的输出,即第一输出结果。
[0167]
由于lstm网络中lstm单元每次的输入中都包括了前一次lstm单元的输出,所以lstm网络中lstm单元最后的输出相当于是总结了目标车辆的行为轨迹特征。
[0168]
需要说明的是,上述lstm单元中第一个时间点早于第二个时间点,且第二个时间点早于第三个时间点,相当于lstm网络的输入是按照时间的先后次序进行输入。
[0169]
步骤2042,识别装置输入目标车辆的出行特征至第二输入子模型,输出第二输出结果。
[0170]
本实施例中,识别装置可以将一段时间内(可以是目标时间内)目标车辆的出行特征输入至分类模型的第二输入子模型。对于任一种出行特征,第二输入子模型会获取该种出行特征对应的嵌入映射矩阵。将该种出行特征与该嵌入映射矩阵相乘,将该种出行特征,转换为统一特征维度的特征。对于每种出行特征,都可以使用对应的嵌入映射矩阵进行转换,转换为统一特征维度的特征,这统一特征维度的特征即为第二输出结果。如表六所示,给出了出行特征的原始维度与统一特征维度的对应关系:
[0171]
表六(出行特征的原始维度与统一特征维度的对应关系)
[0172][0173]
此处需要说明的是,一般具有营运行为的车辆出行比较频繁(即被监控设备记录的次数比较多),而且每天出行的时间段比较早,且回家的时间段比较晚,所以可以从这些方面更进一步,确定车辆是否具有营运行为。
[0174]
还需要说明的是,上述是以一段时间为例进行说明,实际上在相同时间段内提取目标车辆的行车轨迹特征和目标车辆的出行特征,由于目标车辆的行车轨迹特征和出行特征更匹配,所以最终得到车辆是否是具有营运行为的结果更准确。
[0175]
步骤2043,识别装置将第一输出结果和第二输出结果进行拼接,得到拼接后的特征。
[0176]
本实施例中,识别装置执行完步骤2041和步骤2042后,可以将第一输出结果和第二输出结果进行拼接,得到拼接后的特征。第一输出结果和第二输出结果均为一维的矩阵,可以将第二输出结果的矩阵拼接到第一输出结果的后面。例如,第一输出结果为n*1的矩阵,第二输出结果为m个m*1的矩阵,拼接后的特征的矩阵为(n+m*m)*1,且在拼接后的特征的矩阵中第一输出结果位于第二输出结果的左侧。
[0177]
步骤2044,识别装置将拼接后的特征输入至全连接子模型,根据全连接子模型的输出结果,确定目标车辆为具有营运行为的车辆。
[0178]
本实施例中,识别装置在得到拼接后的特征后,可以将拼接后的特征输入到分类模型的全连接子模型。在全连接子模型中,识别装置将拼接后的特征依次进行矩阵乘法、偏差计算、非线性激活函数和softmax函数等的处理,得到全连接子模型的输出结果。
[0179]
全连接子模型的输出结果可以为目标车辆具有营运行为的概率和不具有营运行为的概率。识别装置可以判断具有营运行为的概率与不具有营运行为的概率,若具有营运行为的概率大于或等于不具有营运行为的概率,则识别装置确定目标车辆的具有营运行为,若具有营运行为的概率小于不具有营运行为的概率,则识别装置确定目标车辆不具有营运行为。这样,即会得到目标车辆的是否是具有营运行为的车辆。
[0180]
这样,识别装置在得到目标车辆是否是具有营运行为的车辆时,不仅使用了目标车辆的行车轨迹特征,而且使用了目标车辆的出行特征,所以可以使确定出目标车辆是否
是具有营运行为的车辆的结果更准确。
[0181]
在步骤2044中,判定目标车辆为不具有营运行为的车辆后,可以不进行后续识别非法营运车辆的处理。在步骤2044中,判定目标车辆为具有营运行为的车辆后,可以进行识别非法营运车辆的处理,过程为:
[0182]
识别装置可以获取地理区域内的车辆营运资质信息,具体可以是识别装置向存储有车辆营运资质信息的设备发送获取请求,并在获取请求中携带地理区域的标识。该设备接收到后会,向识别装置发送标识对应的车辆营运资质信息。车辆营运资质信息中包括各个车辆的营运资质信息,对于每个车辆包括车牌号码、有效时长的起始时间、有效时长的截止时间、车辆类型、车辆所有人、吨(座)位、经营范围等,如表七所示。
[0183]
表七(车辆的营运资质信息)
[0184][0185][0186]
识别装置可以使用目标车辆的车牌号码,在车辆的营运资质信息中,确定是否存在目标车辆的车牌号码。若车辆的营运资质信息中,存在目标车辆的车牌号码,则可以确定目标车辆是合法营运车辆。若车辆的营运资质信息中,不存在目标车辆的车牌号码,则可以确定目标车辆是非法营运车辆。另外,在车辆的营运资质信息中存在目标车辆的车牌号码时,还可以进一步判断目标车辆当前的营运时间是否属于起始时间与截止时间之间。若目标车辆当前的营运时间属于起始时间与截止时间之间,则可以确定目标车辆是合法营运车辆。若目标车辆当前的营运时间不属于起始时间与截止时间之间,则可以确定目标车辆是非法营运车辆。
[0187]
另外,在得到目标车辆是非法营运车辆后,识别装置可以将目标车辆的相关信息发送至执法人员的终端,其中,相关信息可以包括目标车辆的车牌号码、非法营运的时间段,非法营运的区域(非法营运的区域可以使用经过的监控设备来确定)等。执法人员的终端在接收到识别装置发送的目标车辆的相关信息后,可以显示目标车辆的相关信息。这样,执法人员可以及时的了解到非法营运车辆,及时的对非法营运车辆进行处理。
[0188]
在另一种实施方式中,在本申请实施中,由于识别装置有可能无法获得车辆的营运资质信息,所以识别装置也可以直接向执法人员的终端发送具有营运行为的车辆的车牌号码,由执法人员的终端执行判断具有营运行为的车辆是否是非法营运车辆。
[0189]
此处需要说明的是,由于有些地理区域中的监控设备记录的过车数据中的车牌号码是加密的,所以识别装置提供给执法人员的终端的车牌号码也是加密的,但是执法人员的终端中存储有原始车牌号码和加密的车牌号码的映射表,所以执法人员的终端可以查找到加密的车牌号码对应的原始车牌号码。然后使用车辆的营运资质信息,确定原始的车牌号码所属的车辆是否是非法营运车辆(具体过程前面已经描述,此处不再赘述)。
[0190]
本申请前述步骤204中所采用的分类模型为经过训练后的一种人工智能ai模型。
本申请实施例中,还给出了训练分类模型的过程,训练分类模型的过程可以使用监督训练中的反向传播算法实现,具体过程可以如下:
[0191]
(1)构建标定的样本集,样本集包括多个样本,样本集中每个样本包括一个车辆的行车轨迹特征、出行特征和标签(该标签为该车辆的营运行为类别,例如:标签为具有营运行为或者不具有营运行为)。
[0192]
(2)确定初始分类模型,初始分类模型可以采用图7所示的模型,只不过其中的参数都是待训练的参数,其中待训练的参数包括第一输入子模型中的权重矩阵和偏置,第二输入子模型中的嵌入映射矩阵、全连接子模型中的权重矩阵和偏置等。
[0193]
(3)将样本集中的多个样本划分为n份样本。
[0194]
(4)选取初始分类模型中待训练的参数的初始参数值。将第一份样本中的行车轨迹特征输入第一输入子模型,将第一份样本中的出行特征输入至第二输入子模型,得到第一份样本的输出值。计算第一份样本的输出值与标签的误差。
[0195]
(5)使用误差,调整待训练参数的初始参数值,得到调整后的参数值。
[0196]
(6)使用调整后的参数值返回执行步骤(4)和步骤(5)直到得到的误差的数值逐渐收敛,即得到最终的分类模型。
[0197]
需要说明的是,训练分类模型的处理是在本申请实施例之前就进行的,例如;可以将训练好的分类模型存储在识别装置中,在执行识别过程时直接获取。训练分类模型的处理也可以是在本申请实施例识别过程开始前进行执行。
[0198]
还需要说明的是,本申请中提到的“至少一个”均为“一个或多个”。
[0199]
本申请实施例中,识别装置可以获取一个地理区域内目标时间内多个监控设备记录的过车数据,然后使用过车数据确定出目标车辆的轨迹信息,在轨迹信息中记录了目标车辆经过的多个分区。然后识别装置可以确定目标车辆经过的多个分区中的每个分区的poi信息,poi信息中记录了目标车辆经过的多个分区中的每个分区的poi的分布情况。然后识别装置可以根据轨迹信息和poi信息,获得目标车辆的行车轨迹特征。识别装置根据行车轨迹特征和分类模型,确定出目标车辆为具有营运行为的车辆。这样,由于可以通过车辆的行车轨迹特征,确定车辆是具有营运行为的车辆,而不需要人工确定,所以可以节约人力资源。而且在确定车辆具有营运行为时,是基于一段时间的过车数据,确定车辆是否具有营运行为,所以可以更准确的确定出的具有营运行为的车辆。
[0200]
图10是本申请实施例提供的识别车辆的营运行为的装置的结构图。该装置可以通过软件、硬件或者两者的结合实现成为装置中的部分或者全部。本申请实施例提供的装置可以实现本申请实施例图2所述的流程,该装置包括:获取模块1010、确定模块1020和识别模块1030,其中:
[0201]
获取模块1010,用于获取目标时间内的所述多个监控设备记录的过车数据,具体可以用于实现步骤201中的获取功能;
[0202]
确定模块1020,用于,根据所述过车数据确定目标车辆的轨迹信息,所述目标车辆的轨迹信息记录了所述目标车辆经过的多个分区,一个分区为所述地理区域中的一部分,具体可以用于实现步骤201确定功能以及执行步骤201包含的隐含步骤;
[0203]
确定所述目标车辆经过的所述多个分区中的每个分区的poi信息,所述poi信息记录了所述目标车辆经过的所述每个分区的poi的分布情况,具体可以用于实现步骤202确定
功能以及执行步骤202包含的隐含步骤;
[0204]
根据所述目标车辆的轨迹信息和所述poi信息,获得所述目标车辆的行车轨迹特征,具体可以用于实现步骤203确定功能以及执行步骤203包含的隐含步骤;
[0205]
识别模块,用于根据所述目标车辆的行车轨迹特征和分类模型,确定所述目标车辆为具有营运行为的车辆,具体可以用于实现步骤204中的识别功能以及执行步骤204包含的隐含步骤。
[0206]
在一种可能的实施方式中,所述确定模块1020,还用于:
[0207]
根据所述过车数据,确定所述目标车辆的出行特征;
[0208]
所述识别模块1030,具体用于:
[0209]
输入所述目标车辆的行车轨迹特征和所述目标车辆的出行特征至所述分类模型,根据所述分类模型的输出结果,确定所述目标车辆为具有营运行为的车辆。
[0210]
在一种可能的实施方式中,所述分类模型包括第一输入子模型、第二输入子模型和全连接子模型;
[0211]
所述识别模块1030,具体用于:
[0212]
输入所述目标车辆的行车轨迹特征至所述第一输入子模型,输出第一输出结果;
[0213]
输入所述目标车辆的出行特征至所述第二输入子模型,输出第二输出结果;
[0214]
将所述第一输出结果和所述第二输出结果进行拼接,得到拼接后的特征;
[0215]
将所述拼接后的特征输入至所述全连接子模型,根据所述全连接子模型的输出结果,确定所述目标车辆为具有营运行为的车辆。
[0216]
在一种可能的实施方式中,所述确定模块1020,具体用于:
[0217]
根据所述过车数据,确定所述目标车辆经过的多个目标监控设备的标识和所述目标车辆经过所述多个目标监控设备的时间点;
[0218]
根据所述目标车辆经过的所述多个目标监控设备的标识和所述目标车辆经过所述多个目标监控设备的时间点,确定所述目标车辆的轨迹信息。
[0219]
在一种可能的实施方式中,所述获取模块1010,还用于获取所述地理区域内的车辆营运资质信息;
[0220]
所述确定模块1020,还用于根据所述车辆营运资质信息确定所述目标车辆为非法营运车辆。
[0221]
在一种可能的实施方式中,所述地理区域中的每个分区中包括至少一个监控设备,所述确定所述目标车辆经过的所述多个分区中的每个分区的poi信息之前,所述确定模块1020,还用于:
[0222]
对所述地理区域内的所有poi进行聚类,获得多个poi类型;
[0223]
统计所述地理区域中的多个分区中的poi信息。
[0224]
在一种可能的实施方式中,所述确定模块1020,具体用于:
[0225]
根据所述目标车辆的轨迹信息中的监控设备的标识和所述poi信息中的监控设备的标识,将相同监控设备的标识对应的所述轨迹信息中的时间点与所述poi信息中poi的分布情况相关联,得到所述目标车辆的轨迹信息中的每个时间点对应的poi的分布情况;
[0226]
将所述每个时间点对应的poi的分布情况,按照时间的先后顺序进行排列,获得所述目标车辆的行车轨迹特征。
[0227]
在一种可能的实施方式中,所述分类模型采用深度学习模型,在输入所述目标车辆的行车轨迹特征至所述分类模型之前,所述确定模块1020,还用于确定初始分类模型;
[0228]
如图11所示,所述装置还包括:
[0229]
训练模块1040,用于根据已知的具有营运行为的车辆和不具有营运行为的车辆的行车轨迹特征对所述初始分类模型进行训练,获得所述分类模型。
[0230]
在一种可能的实施方式中,所述确定模块1020,还用于:
[0231]
根据所述地理区域的地图拓扑数据和所述多个监控设备的地理位置信息,对所述地理区域进行划分,获得所述地理区域的多个分区,每个分区中包括至少一个监控设备。
[0232]
本申请实施例中对模块的划分是示意性的,仅仅为一种逻辑功能划分,实际实现时也可以有另外的划分方式,另外,在本申请各个实施例中的各功能模块可以集成在一个处理器中,也可以是单独物理存在,也可以两个或两个以上模块集成为一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。
[0233]
该集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台终端设备(可以是个人计算机,手机,或者网络设备等)或处理器(processor)执行本申请各个实施例该方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
[0234]
本申请实施例中,由于可以通过车辆的行车轨迹特征,确定车辆是非法营运车辆,而不需要人工确定,所以可以节约人力资源。而且在确定车辆是非法营运车辆时,有监控数据作为证据,可以减少无法进行查处的情况的发生。
[0235]
需要说明的是:上述实施例提供的识别车辆的营运行为的装置在识别车辆的营运行为时,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将装置的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。另外,上述实施例提供的识别车辆的营运行为的装置与识别车辆的营运行为的方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
[0236]
本申请实施例中还提供了一种识别车辆的营运行为的计算设备。图12示例性的提供了计算设备1200的一种可能的架构图。
[0237]
计算设备1200包括存储器1201、处理器1202、通信接口1203以及总线1204。其中,存储器1201、处理器1202、通信接口1203通过总线1204实现彼此之间的通信连接。
[0238]
存储器1201可以是只读存储器(read only memory,rom),静态存储设备,动态存储设备或者随机存取存储器(random access memory,ram)。存储器1201可以存储程序,当存储器1201中存储的程序被处理器1202执行时,处理器1202和通信接口1203用于执行识别车辆的营运行为的方法。存储器1201还可以存储数据集合,例如:存储器1201中的一部分存储资源被划分成一个数据集存储模块,用于存储执行识别车辆的营运行为的方法所需的数据集,存储器1201中的一部分存储资源被划分成一个分类模型存储模块,用于存储图7所示
的分类模型。
[0239]
处理器1202可以采用通用的中央处理器(central processing unit,cpu),微处理器,应用专用集成电路(application specific integrated circuit,asic),图形处理器(graphics processing unit,gpu)或者一个或多个集成电路。
[0240]
处理器1202还可以是一种集成电路芯片,具有信号的处理能力。在实现过程中,本申请的识别车辆的营运行为的装置的部分或全部功能可以通过处理器1202中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器1202还可以是通用处理器、数字信号处理器(digital signal processing,dsp)、专用集成电路(asic)、现成可编程门阵列(field programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。可以实现或者执行本申请上述实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本申请实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器1201,处理器1202读取存储器1201中的信息,结合其硬件完成本申请实施例的识别车辆的营运行为的装置的部分功能。
[0241]
通信接口1203使用例如但不限于收发器一类的收发模块,来实现计算设备1200与其他设备或通信网络之间的通信。例如,可以通过通信接口1203获取数据集。
[0242]
总线1204可包括在计算设备1200各个部件(例如,存储器1201、处理器1202、通信接口1203)之间传送信息的通路。
[0243]
在计算机设备1200为多个时,上述每个计算设备1200间通过通信网络建立通信通路。每个计算设备1200上运行获取模块1010、确定模块1020、识别模块1030或训练模块1040中的任意一个或多个。任一计算设备1200可以为云数据中心中的计算设备(例如:服务器),或边缘数据中心中的计算设备,或终端计算设备。
[0244]
上述各个附图对应的流程的描述各有侧重,某个流程中没有详述的部分,可以参见其他流程的相关描述。
[0245]
本申请实施例中,还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,当计算机可读存储介质中存储的计算机指令被计算设备执行时,使得计算设备执行上述所提供的识别车辆的营运行为的方法,或者使得所述计算设备实现上述提供的识别车辆的营运行为的装置的功能。
[0246]
本申请实施例中,还提供了一种包含指令的计算机程序产品,当其在计算设备上运行时,使得计算设备执行上述所提供的识别车辆的营运行为的方法,或者使得所述计算设备实现上述提供的识别车辆的营运行为的装置的功能。
[0247]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现,当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令,在服务器或终端上加载和执行所述计算机程序指令时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同
轴光缆、光纤、数字用户线)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是服务器或终端能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质(如软盘、硬盘和磁带等),也可以是光介质(如数字视盘(digital video disk,dvd)等),或者半导体介质(如固态硬盘等)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1