一种带有通信冗余功能的无人船遥控器的制作方法
[0001]
本实用新型属于通信领域,特别涉及一种带有通信冗余功能的无人船遥控器。
背景技术:
[0002]
随着科学技术的进步和人类对海洋活动需求的增加,海上无人装备发展迅速,并在很多场合得到了应用。无人船在搭载了多种传感器后,可以按照预设程序或人为指挥的方式在海洋上执行长航时、全天候、大范围的任务,尤其是在环境较差、不宜进行人工作业的区域。民用领域如海洋环境监测、海上安全保障、海洋气象预报、资源勘探、海图测绘、海洋生物研究,军用领域如海面无人作战、海上巡逻与侦查等,都将无人船作为重点发展目标。以无人船为代表的海上运载平台和数据采集平台正朝着多任务、智能化的方向发展。
[0003]
依托智能化技术,当前的无人船大多能够自主执行任务。但是随着任务复杂性的增加,以及外界环境的不可预知,无人船的自主性并不能完全实现,同时为了保证无人船的安全和特定任务的执行,必须依靠操作人员通过遥控器对无人船进行实时的干预控制。
[0004]
传统的无人船遥控器往往只采用单一的通信方式,比如数传电台,一旦该通信链路失效,即断开了与无人船之间的联系,会严重威胁无人船的安全。
技术实现要素:
[0005]
针对当前无人船遥控器存在的通信模式单一的技术问题,本实用新型提出了一种带有通信冗余功能的无人船遥控器。
[0006]
本实用新型同时集成了数传电台和北斗通信两种通信模式,操作人员可以根据需要通过通信链路选择开关自由切换通信模式。遥控器收到无人船的状态数据后,会通过状态显示屏显示当前的无人船状态,同时通过扬声器进行播报,使得操作人员能够同时从视觉和听觉两个层面获知无人船的状态信息,这样更符合人们的操作习惯,以便操作人员及时准确掌握无人船的状况。此外,本实用新型还预留了程序烧写接口,便于后期对遥控器的功能进行定制和升级。
[0007]
一种带有通信冗余功能的无人船遥控器,该遥控器包括数传电台模块和北斗通信模块,数传电台模块与北斗通信模块能够切换;
[0008]
作为本实用新型的进一步方案:所述数传电台模块包括数传电台天线e2和数传电台芯片u5,数传电台模块通过数传电台电路与主控芯片u1a连接,所述北斗通信模块包括北斗通信天线e1和北斗通信芯片u4,北斗通信模块通过北斗通信电路与主控芯片u1a连接,该遥控器上设有通信链路选择开关s1,通信链路选择开关s1通过开关电路与主控芯片连接。
[0009]
作为本实用新型的再进一步方案:所述数传电台电路包括电容c8,所述电容c8一端接u5的rxd脚以及u5的vcc脚并接电源vcc;电容c8的另一端接u5 的gnd脚并接地;天线e2接u5的rf-data脚,u5的txd脚通过radio-tx接口连接主控芯片u1a的pa2脚,u5的rxd脚通过radio-rx接口连接主控芯片u1a 的pa3脚;其中所述芯片u5的型号为sx1278,电容c8的容值为0.1uf。
[0010]
数传电台天线e2为可拆卸单极子鞭状天线,sma接口为外螺内孔形式,具有lora扩频功能,休眠电流低至1.5ua,最大发射功率约30dbm(约1w),工作频率为433mhz。u5的2号和3号引脚用于传输信息;
[0011]
作为本实用新型的再进一步方案:所述北斗通信电路包括电容c7和顺序编号的电阻r13至电阻r16,所述电阻r13的一端接u4的tx1脚;电阻r15的一端接u4的tx0脚;电阻r13的另一端接电阻r15的另一端并连接有bd-tx接口, bd-tx接口连接u1a的pa8脚;电阻r14的一端接u4的rx1脚;电阻r16的另一端接u4的rx0脚;电阻r14的另一端接电阻r16的另一端并bd-rx接口;bd-rx 接口连接u1a的pa10脚,电容c7的一端接u4的vcc脚并接电源;电容c7的另一端接u4的gnd脚、u4的gnd2脚、u4的gnd3脚、u4的gnd4脚、u4的gnd5 脚以及天线e1的gnd脚并接地;天线e1的rf-rx脚接u4的rd-tx脚;天线e1 的rf-tx脚接u4的rd-rx脚;其中所述北斗通信芯片u4的型号为rd0538d,天线e1为圆极化平面天线,顺序编号的电阻r13至电阻r16的阻值为500ω,电容 c7的容值为0.1uf。
[0012]
北斗通信天线e1采用圆极化平面天线,集成在遥控器面板上层的壳体中,通过sma接口和遥控器主板电路中的u4相连,通信范围可覆盖亚太大部分地区。 u4的12号和14号引脚用于传输经由北斗通信的发送信号,u4的13号和15号引脚用于传输经由北斗通信天线接收的信号;
[0013]
作为本实用新型的再进一步方案:所述开关电路包括电阻r11、电阻r12和电容c1,所述电阻r11的一端接u1a的boot0脚;电阻r11的另一端接电容c1 的一端以及开关s1的2脚并接地;电容c1的另一端接电阻r12的一端以及u1a 的nrst脚;电阻r12的另一端接电源;其中所述开关s1的型号为ss-13f03型拨动开关,电阻r11以及电阻r12的阻值为5.1mω,电容c1的容值为0.1uf;
[0014]
工作时,通过开关s1在数传电台模块与北斗通信模块之间切换,使得在数传电台模块的通信链路失效后,北斗通信模块能够提供北斗卫星通信;实现通信冗余,保障无人船通信安全。当s1的触点1和触点2连通时,pc1引脚输入为低电平,即选择了数传电台通信模式;当触点3和触点2连通时,pc0引脚输入为低电平,即选择了北斗卫星通信模式。任一时刻只能选择一种通信模式;
[0015]
作为本实用新型的进一步方案:该控制器上还设有操作按钮组件、状态反馈指示组件和接口组件;所述操作按钮组件包括4个方向开关按钮s2-s5和中间的确认开关按钮s6;操作按钮组件通过操作按钮电路与主控芯片u1a连接;所述操作按钮组件包括4个方向开关按钮和中间的确认开关按钮,这个操作按钮组件通过按钮电路与主控芯片u1a连接,所述按钮电路包括除顺序编号的按钮s2至按钮s6,所述顺序编号的按钮s2至按钮s6的一端相连并接地;按钮s2的另一端接u1a的pb9脚;按钮s3的另一端接u1a的pb12脚;按钮s4的另一端接u1a 的pb13脚;按钮s5的另一端接u1a的pb14脚;按钮s6的另一端接u1a的pb15 脚;其中所述按钮s2至s6为规格3mm
╳
4mm
╳
2.5mm的微动开关;遥控按钮用于对无人船进行操控;
[0016]
作为本实用新型的再进一步方案:所述状态反馈指示组件包括数传电台信号状态指示灯、状态显示屏、电量指示灯、北斗通信信号状态指示灯和扬声器;状态反馈指示组件通过状态反馈电路与主控芯片u1a连接;所述状态反馈电路包括显示屏u2、芯片u6、顺序编号的指示灯led1至led4、指示灯rf_led_p、指示灯rf_led_t、指示灯rf_led_r、指示灯bd_led_p、指示灯bd_led_t、指示灯 bd_led_r、顺序编号的电阻r1至电阻r10、扬声器speaker、
电阻r17、电阻r18 和顺序编号的电容c9至电容c12,所述顺序编号的电阻r1至电阻r10的一端相连并接电源;电阻r1的另一端接指示灯rf_led_p的正极;电阻r2的另一端接指示灯rf_led_t的正极;电阻r3的另一端接指示灯rf_led_r的正极;电阻r4 的另一端接指示灯bd_led_p的正极;电阻r5的另一端接指示灯bd_led_t的正极;电阻r6的另一端接指示灯bd_led_r的正极;电阻r7的另一端接led1的正极;电阻r8的另一端接led2的正极;电阻r9的另一端接led3的正极;电阻 r10的另一端接led4的正极;指示灯rf_led_p的负极接u1a的pa5脚;指示灯 rf_led_t的负极接u1a的pa6脚;指示灯rf_led_r的负极接u1a的pa7脚;指示灯bd_led_p的负极接u1a的pa13脚;指示灯bd_led_t的负极接u1a的pa14 脚;指示灯bd_led_r的负极接u1a的pa15脚;led1的负极接u1a的pc8脚; led2的负极接u1a的pc9脚;led3的负极接u1a的pc10脚;led4的负极接u1a 的pc11脚;显示屏u2的d0脚接u1a的pb0脚;u2的d1脚接u1a的pb1脚; u2的d2脚接u1a的pb2脚;u2的d3脚接u1a的pb3脚;u2的d4脚接u1a的 pb4脚;u2的d5脚接u1a的pb5脚;u2的d6脚接u1a的pb6脚;u2的d7脚接 u1a的pb7脚;u2的vcc脚接电源;u2的gnd脚接地;电阻r17的一端接电容 c9的一端;电阻r17的另一端接u6的in+端;电容c9的另一端接u1a的pb15 脚;电阻r18的一端接电容c11的正极以及u6的vout脚;电阻r18的另一端接电容c12的一端;电容c11的负极接喇叭speaker的一端;电容c12的另一端接喇叭speaker的另一端、u6的gnd脚以及u6的in-脚并接地;电容c10的一端接u6的一个gain脚;电容c10的另一端接u6的另一个gain脚;u6的vs脚接电源;其中,所述显示屏u2为3.5寸320
╳
480分辨率的非触摸tft lcd屏,其驱动芯片为st7920,芯片u6的型号为lm386m-1,扬声器speaker采用功率为 5w、阻抗4ω、直径3.3寸、高34mm的带磁罩扬声器,顺序编号的电阻r1至电阻r10的阻值为500ω,电阻r17的阻值为43kω,电阻r18的阻值为100ω,电容c9、电容c10、电容c12的容值为0.1uf,电容c11的容值为100uf;
[0017]
状态显示屏用于显示无人船的状态,无人船遥控器收到无人船发来的状态数据后,会将其实时显示在状态显示屏上,同时通过扬声器播报无人船的状态,信号收发状态指示灯和电量指示灯分别用于指示信号收发状态和电量,rf_led_p 用于指示数传电台组件的供电情况,rf_led_t用于指示数传电台信号的发送情况,每发送一帧数据,该指示灯会发亮,并持续1秒钟后熄灭。rf_led_r用于指示数传电台信号的接收情况,每接收一帧数据,该指示灯会发亮,并持续1 秒钟后熄灭。bd_led_p用于指示北斗通信组件的供电情况,bd_led_t用于指示北斗通信信号的发送情况,每发送一帧数据,该指示灯会发亮,并持续1秒钟后熄灭,bd_led_r用于指示北斗通信信号的接收情况,每接收一帧数据,该指示灯会发亮,并持续1秒钟后熄灭。led1、led2、led3和led4分别对应1、2、3 和4号电量指示灯,这四个发光二极管通过不同的发亮和熄灭组合指示电池电量;
[0018]
作为本实用新型的再进一步方案:所述接口组件包括充电接口和程序烧写接口;所述程序烧写接口通过烧写电路与主控芯片u1a连接,烧写电路包括顺序编号的电容c4至电容c6,所述电容c4一端接u3的c1+脚,另一端接u3的c1-脚;电容c5的一端接u3的c2+脚,另一端接u3的c2-脚;电容c6的一端接u3的 gnd脚并接地;电容c6的另一端接u3的vcc脚并接电源;u3的t1out脚接j1 的2脚;u3的r1in脚接j1的3脚;u3的t1in脚通过prg-tx接口连接主控芯片u1a的pb10脚,u3的r1out脚通过prg-rx接口连接主控芯片u1a的pb11脚;其中所述芯片u3的型号为max232acpe,j1为9针标准rs232串口,顺序编号的电容c4至电容c6的容值为0.47uf;
[0019]
由于stm32单片机的默认电平标准为ttl电平,和rs232的电平标准不同,因此引入了max232acpe芯片进行电平的转换。通过j1将编程接口电路的发送端和接收端口引出。电容c4和电容c5均用于直流信号的隔离,电容c6用于对电源中的交流信号进行滤波。通过程序烧写接口可以方便地对遥控器内部程序进行烧写,便于功能的定制和升级;
[0020]
作为本实用新型的再进一步方案:该遥控器还内置有晶振电路,所述晶振电路包括电阻r13、电容c2、电容c3和晶振xtal,电阻r13一端接xtal的1脚以及电容c2的一端并接u1a的pd0-osc_in脚;电阻r13的另一端接xtal的2 脚以及电容c3的一端并接u1a的pd1-osc_out脚;电容c2的另一端接电容c3 的另一端并接地;其中电阻r13的阻值为1mω,电容c2以及电容c3的容值为 22pf,晶振xtal的频率为11.0592mhz;
[0021]
与现有技术相比,本实用新型的有益效果是:本实用新型同时集成了数传电台和北斗通信两种通信模式,操作人员可以根据需要通过通信链路选择开关自由切换通信模式。无人船的状态数据会通过状态显示屏显示,同时通过扬声器进行播报,使得操作人员能够同时从视觉和听觉两个层面获知无人船的状态信息,以便操作人员及时准确掌握无人船的状况。遥控器面板上的数传电台信号状态指示灯、北斗通信信号状态指示灯分别指示了数传电台、北斗通信的信号收发状况。此外,本实用新型还预留了程序烧写接口,便于后期对遥控器的功能进行定制和升级。
附图说明
[0022]
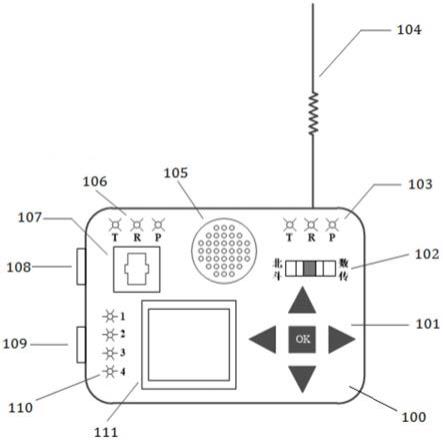
图1是一种带有通信冗余功能的无人船遥控器的结构示意图。
[0023]
图2是一种带有通信冗余功能的无人船遥控器的主控电路及其外围电路原理图。
[0024]
图3是一种带有通信冗余功能的无人船遥控器的数传电台电路原理图。
[0025]
图4是一种带有通信冗余功能的无人船遥控器的北斗通信电路原理图。
[0026]
图5是一种带有通信冗余功能的无人船遥控器的扬声器电路原理图。
[0027]
图6是一种带有通信冗余功能的无人船遥控器的遥控器程序烧写接口电路原理图。
[0028]
图中:100、遥控器;101、无人船遥控按钮;102、通信链路选择开关;103、数传电台信号状态指示灯;104、数传电台天线;105、扬声器;106、北斗通信信号状态指示灯;107、北斗通信天线;108、程序烧写接口;109、充电接口; 110、电量指示灯;111、状态显示屏。
具体实施方式
[0029]
下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
[0030]
请参阅图1;一种带有通信冗余功能的无人船遥控器;该遥控器上设有数传电台天线104、数传电台信号状态指示灯103、通信链路选择开关102、无人船遥控按钮101、状态显示屏111、电量指示灯110、充电接口109、程序烧写接口 108、北斗通信天线107、北斗通信信号状态指示灯106和扬声器105;数传电台天线104和数传电台信号状态指示灯103位于遥控器100的右上方,北斗通信天线107和北斗通信信号状态指示灯106位于遥控器100的左上方,便于操作人员观察;电量指示灯110由4个led发光二极管组成,标号分别为1、2、3、4,电
量指示灯110和电池电量的对应关系为:1、2、3、4常亮对应满电量,2、3、 4常亮对应75%的电量,3、4常亮对应50%的电池电量,4常亮对应25%的电池电量。通信链路选择开关102位于数传电台信号状态指示灯103的下方,由操作人员根据需要手动控制。无人船遥控按钮101位于遥控器100的右下方,便于操作人员用右手进行操作,包括前进、后退、左转、右转、确定(ok)五个按键,用于发送无人船遥控指令。状态显示屏111位于遥控器100的左下方,用于显示无人船的航向、航速、经纬度、任务执行情况和故障情况内容;扬声器105位于遥控器100的中上方,用于语音播报无人船的状态数据;遥控器100的壳体缝隙之间涂有防水胶,以防止内部电子元器件受潮;
[0031]
如图2所示,图中包括主控芯片及其外围电路,外围电路包括晶振电路、通信链路选择开关电路、操作按钮电路、显示屏电路和指示灯电路,所述主控电路及其外围电路包括主控芯片u1a、显示屏u2、顺序编号的电阻r1至电阻r13、顺序编号的电容c1至电容c3、顺序编号的开关s1至开关s6、顺序编号的led 灯led1至led4、led灯rf_led_p、led灯rf_led_t、led灯rf_led_r、led灯 bd_led_p、led灯bd_led_t、led灯bd_led_r和晶振xtal,所述芯片u1a的型号为stm32f103ret6,显示屏u2为3.5寸320
╳
480分辨率的非触摸tft lcd屏,其驱动芯片为st7920,开关s1的型号为ss-13f03型拨动开关,顺序编号的电阻r1至电阻r10的阻值为500ω,电阻r11以及电阻r12的阻值为5.1mω,电阻r13的阻值为1mω,电容c1的容值为0.1uf,电容c2以及电容c3的容值为 22pf,晶振xtal的频率为11.0592mhz;所述顺序编号的电阻r1至电阻r10的一端相连并接电源;电阻r1的另一端接led灯rf_led_p的正极;电阻r2的另一端接led灯rf_led_t的正极;电阻r3的另一端接led灯rf_led_r的正极;电阻r4的另一端接led灯bd_led_p的正极;电阻r5的另一端接led灯bd_led_t 的正极;电阻r6的另一端接led灯bd_led_r的正极;电阻r7的另一端接led 灯led1的正极;电阻r8的另一端接led灯led2的正极;电阻r9的另一端接 led灯led3的正极;电阻r10的另一端接led灯led4的正极;led灯rf_led_p 的负极接u1a的pa5脚;led灯rf_led_t的负极接u1a的pa6脚;led灯rf_led_r 的负极接u1a的pa7脚;led灯bd_led_p的负极接u1a的pa13脚;led灯bd_led_t 的负极接u1a的pa14脚;led灯bd_led_r的负极接u1a的pa15脚;led灯led1 的负极接u1a的pc8脚;led灯led2的负极接u1a的pc9脚;led灯led3的负极接u1a的pc10脚;led灯led4的负极接u1a的pc11脚;电阻r11的一端接 u1a的boot0脚;电阻r11的另一端接电容c1的一端以及开关s1的2脚并接地;电容c1的另一端接电阻r12的一端以及u1a的nrst脚;电阻r12的另一端接电源;电阻r13一端接xtal的1脚以及电容c2的一端并接u1a的pd0-osc_in脚;电阻r13的另一端接xtal的2脚以及电容c3的一端并接u1a的pd1-osc_out 脚;电容c2的另一端接电容c3的另一端以及顺序编号的开关s2至开关s6的一端并接地;开关s1的1脚接u1a的pc1脚;开关s1的3脚接u1a的pc0脚;开关s2的另一端接u1a的pb9脚;开关s3的另一端接u1a的pb12脚;开关s4 的另一端接u1a的pb13脚;开关s5的另一端接u1a的pb14脚;开关s6的另一端接u1a的pb15脚;u2的d0脚接u1a的pb0脚;u2的d1脚接u1a的pb1脚; u2的d2脚接u1a的pb2脚;u2的d3脚接u1a的pb3脚;u2的d4脚接u1a的 pb4脚;u2的d5脚接u1a的pb5脚;u2的d6脚接u1a的pb6脚;u2的d7脚接 u1a的pb7脚;u2的vcc脚接电源;u2的gnd脚接地;u1a的pa2脚接u5的txd 脚;u1a的pa3脚接u5的rxd脚;u1a的pa9脚接电阻r13的一端以及电阻r15 的一端;u1a的pa10脚接电阻r14的一端以及电阻r16的一端;u1a的pb10脚接u3的t1in脚;u1a的pb11脚接u3的r1out脚;
[0032]
遥控器100主板电路通过3.3v电源电压供电,由11.0592mhz的晶振提供时钟频率。rf_led_p用于指示数传电台组件的供电情况,rf_led_t用于指示数传电台信号的发送情况,每发送一帧数据,该指示灯会发亮,并持续1秒钟后熄灭。 rf_led_r用于指示数传电台信号的接收情况,每接收一帧数据,该指示灯会发亮,并持续1秒钟后熄灭。bd_led_p用于指示北斗通信组件的供电情况,bd_led_t 用于指示北斗通信信号的发送情况,每发送一帧数据,该指示灯会发亮,并持续 1秒钟后熄灭,bd_led_r用于指示北斗通信信号的接收情况,每接收一帧数据,该指示灯会发亮,并持续1秒钟后熄灭。led1、led2、led3和led4分别对应1、 2、3和4号电量指示灯110,这四个发光二极管通过不同的发亮和熄灭组合指示电池电量。当s1的触点1和触点2连通时,pc1引脚输入为低电平,即选择了数传电台通信模式;当触点3和触点2连通时,pc0引脚输入为低电平,即选择了北斗卫星通信模式。任一时刻只能选择一种通信模式。无人船遥控按钮101 为规格3mm
╳
4mm
╳
2.5mm的微动开关,前进、后退、左转、右转、确认(ok)五个按钮分别对应于图1中的s2、s3、s4、s5、s6,分别连接至u1的pb9、pb12、 pb13、pb14、pb15引脚,均通过低电平触发的方式工作,即单片机检测到某引脚变为低电平时,则判断该按钮被按下;
[0033]
如图3所示:所述数传电台电路包括芯片u5、电容c8和天线e2,所述芯片 u5的型号为sx1278,电容c8的容值为0.1uf;所述电容c8一端接u5的rxd脚以及u5的vcc脚并接电源;电容c8的另一端接u5的gnd脚并接地;天线e2 接u5的rf-data脚;
[0034]
数传电台天线e2为可拆卸单极子鞭状天线,sma接口为外螺内孔形式,具有lora扩频功能,休眠电流低至1.5ua,最大发射功率约30dbm(约1w),工作频率为433mhz。u5的2号和3号引脚用于传输信息;
[0035]
如图4所示:所述北斗通信电路包括芯片u4、天线e1、电容c7和顺序编号的电阻r13至电阻r16,所述芯片u4的型号为rd0538d,天线e1为圆极化平面天线,顺序编号的电阻r13至电阻r16的阻值为500ω,电容c7的容值为0.1uf;所述电阻r13的一端接u4的tx1脚;电阻r13的另一端接电阻r15的一端;电阻r15的另一端接u4的tx0脚;电阻r14的一端接u4的rx1脚;电阻r14的另一端接电阻r16的一端;电阻r16的另一端接u4的rx0脚;电容c7的一端接 u4的vcc脚并接电源;电容c7的另一端接u4的gnd脚、u4的gnd2脚、u4的 gnd3脚、u4的gnd4脚、u4的gnd5脚以及天线e1的gnd脚并接地;天线e1的 rf-rx脚接u4的rd-tx脚;天线e1的rf-tx脚接u4的rd-rx脚;
[0036]
北斗通信天线e1采用圆极化平面天线,集成在遥控器100面板上层的壳体中,通过sma接口和遥控器100主板电路中的rd0538d北斗通信芯片相连,通信范围可覆盖亚太大部分地区。u4的12号和14号引脚用于传输经由北斗通信的发送信号,u4的13号和15号引脚用于传输经由北斗通信天线107接收的信号;
[0037]
如图5所示:所述扬声器电路包括芯片u6、顺序编号的电容c9至电容c12、电阻r17、电阻r18和扬声器speaker,所述芯片u6的型号为lm386m-1,扬声器speaker采用功率为5w、阻抗4ω、直径3.3寸、高34mm的带磁罩扬声器,电阻r17的阻值为43kω,电阻r18的阻值为100ω,电容c9、电容c10、电容 c12的容值为0.1uf,电容c11的容值为100uf;所述电阻r17的一端接电容c9 的一端;电阻r17的另一端接u6的in+端;电容c9的另一端接u1a的pb15脚;电阻r18的一端接电容c11的正极以及u6的vout脚;电阻r18的另一端接电容 c12的一端;电容c11的负极接喇叭speaker的一端;电容c12的另一端接喇叭 speaker的另一端、u6的gnd脚
以及u6的in-脚并接地;电容c10的一端接u6 的一个gain脚;电容c10的另一端接u6的另一个gain脚;u6的vs脚接电源;
[0038]
本实用新型的创新在于,即当遥控器100收到无人船的反馈数据后,不仅通过状态显示屏111显示无人船的状态数据,还会通过扬声器105进行语音播报。当u1收到无人船的状态数据,经过分析后向功率放大器lm386m-1输出pwm信号,放大后由扬声器105播报数据。电容c11和c12用于对播报的语音信号进行滤波;
[0039]
如图6所示:所述遥控器程序烧写接口电路包括芯片u3、db9接口j1和顺序编号的电容c4至电容c6,所述芯片u3的型号为max232acpe,j1为9针标准 rs232串口,顺序编号的电容c4至电容c6的容值为0.47uf;所述电容c4一端接u3的c1+脚,另一端接u3的c1-脚;电容c5的一端接u3的c2+脚,另一端接u3的c2-脚;电容c6的一端接u3的gnd脚并接地;电容c6的另一端接u3 的vcc脚并接电源;u3的t1out脚接j1的2脚;u3的r1in脚接j1的3脚;
[0040]
由于stm32单片机的默认电平标准为ttl电平,和rs232的电平标准不同,因此引入了max232acpe芯片进行电平的转换。通过j1将编程接口电路的发送端和接收端口引出。电容c4和电容c5均用于直流信号的隔离,电容c6用于对电源中的交流信号进行滤波。通过程序烧写接口108可以方便地对遥控器内部程序进行烧写,便于功能的定制和升级;
[0041]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
[0042]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1