用于智能管理多路停车交叉口的方法、系统、模块和软件与流程
用于智能管理多路停车交叉口的方法、系统、模块和软件
1.相关申请的交叉引用
2.无
3.版权
4.本专利文件的部分公开包含受(版权或屏蔽作品)保护的材料。(版权或屏蔽作品)所有者不反对任何人对专利文件或专利公开的拓制,因为其出现在专利商标局专利文件或记录中,但在其他方面保留所有(版权或屏蔽作品)任何权利。
技术领域
5.本公开涉及用于对导航通过多路停车交叉口进行主动协调的方法操作、系统和系统组件。特别地,本公开涉及使用车联网(vehicle
‑
to
‑
everything,v2x)消息收发实现对通过交叉口进行主动协调的系统、组件和方法。
技术实现要素:
6.根据本公开,提供使导航通过多路停车交叉口(例如,非信号交叉口、部分信号交叉口和完全信号交叉口)改进以提高效率和安全性的系统、组件和方法。
7.根据至少一个实施例,提供了使运输车辆能够通过经由车联网(v2x)消息进行的通信来主动协调其如何行进通过交叉口的方法操作和功能。
8.根据至少一些公开的实施例,操作和功能可用于加强交通规则并提高多路停车交叉口处的交通流。
9.对于本领域的技术人员来说,在考虑了说明性的实施例后,本公开的附加的特征将变得很明显,这些实施例体现了目前所认为的实施本公开的最佳模式。
附图说明
10.详细的说明具体参照附图,其中:
11.图1至图7提供了对根据所公开的实施例的导航通过交叉口的多个运输车辆的交互进行说明的说明图。
12.图8说明了在序列图中提供的操作的示例,其概述了多路停止消息(multi
‑
way stop message,mwsm)消息生成和结合所公开的实施例执行的基本内部过程,以交换信息以就交叉口处的导航顺序达成协定。
13.图9说明了关于根据所公开的实施例的作为接近阶段的一部分而执行的分析和处理操作的附加细节。
14.图10说明了关于根据所公开的实施例的作为停止阶段的一部分而执行的分析和处理操作的附加细节。
15.图11说明了关于根据所公开的实施例的作为启动阶段的一部分而执行的分析和处理操作的附加细节。
16.图12和图13说明了关于根据所公开的实施例的作为匹配接收到的识别为接近交
叉口的其他车辆的bsm/cam数据的一部分而执行的分析和处理操作的附加细节。
17.图14说明了关于图12中提到的用于提供所公开的实施例的功能的应用逻辑的附加细节。
18.图15说明了关于对所公开的实施例的功能的激活的附加细节。
19.图16说明了关于根据所公开的实施例的作为接近阶段和approachlist(接近列表)的制定的一部分而执行的分析和处理操作的附加细节。
20.图17说明了关于根据所公开的实施例的作为停止阶段和stoplist(停止列表)的制定的一部分而执行的分析和处理操作的附加细节。
21.图18说明了关于根据所公开的实施例所使用的inconflictzone list(冲突区中列表)的附加细节。
22.图19提供了关于根据所公开的实施例的用于传输到其他车辆的mswm消息的生成的附加细节。
23.图20说明了关于根据所公开的实施例的作为启动阶段的一部分执行的分析和处理操作的附加细节。
24.图21a至图21c说明了根据所公开的实施例的用于生成和维护车辆的列表的各种处理操作。
25.图22说明了根据所公开的实施例的用于计算待与交叉口冲突区处的多个运输车辆中的每一个相关联的序号的各种处理操作。
26.图23说明了关于用于分析交叉口处的两个车辆的顺序计算的附加细节。
27.图24说明了关于图23中所说明的比较操作的附加细节。
28.图25a至图25b说明了关于用于分析交叉口处的三个车辆的顺序计算的附加细节。
29.图26a至图26c说明了关于用于分析交叉口处的四个车辆的顺序计算的附加细节。
30.图27说明了可以作为运输车辆的can的一部分或耦合到运输车辆的can的部分来实现的交叉口导航分析模块的组件的示例。
具体实施方式
31.在此提供的附图和描述可能已被简化以说明与在此所描述的设备、系统和方法的清楚理解相关的方面,同时为了清楚的目的,消除了可在典型设备、系统和方法中找到的其他方面。普通技术人员可以认识到,实现在此所描述的设备、系统和方法可能期望和/或需要其他元件和/或操作。因为这样的元件和操作在本领域中是众所周知的,并且因为它们不利于更好地理解本公开,所以在此可以不提供对这样的元件和操作的讨论。然而,本公开被认为固有地包括本领域普通技术人员已知的对所描述的方面的所有这样的元件、变化和修改。
32.根据美国联邦公路管理局(fha),2007年美国所有道路车辆事故中有一半以上发生在交叉口。在当年发生在交叉口的8657起死亡事故中,超过70%发生在无信号的交叉口,即在每个交叉口引道上没有为用户指示如何和/或何时通过交叉口的指示器的交叉口。当今道路上的无信号多路停车交叉口需要由运输车辆的驾驶员使用零星和/或模糊的手势进行协商,并对交叉口状态以及所有导航通过该交叉口的运输车辆的状态进行容易出错的人工分析。
33.所公开的实施例提供了一种用于提高交通流效率和安全性的技术解决方案。更具体地,所公开的实施例提供了一种消除运输车辆运动预测中的歧义的技术解决方案。因此,所公开的实施例可用于同时安全地使多个运输车辆通过交叉口(当地法律允许),从而在保持安全的同时提高交通流效率。
34.例如,如果四个运输车辆停在交叉口并且所有的运输车辆都在右转,那么就没有理由不让所有的运输车辆同时在交叉口执行运动。因此,通过实施所公开的实施例的这种功能,这个交叉口可以以在当前交通范例下的这种过程所需时间的25%来清空。
35.所公开的实施例提供了一种用于通过利用v2x消息收发技术、特别是车对车(vehicle
‑
to
‑
vehicle,v2v)消息收发技术来提高多路停车交叉口的安全性和效率的技术解决方案。
36.根据至少一些所公开的实施例,运输车辆包括使车辆能够使用v2v消息来主动协调运输车辆如何相对于交叉口处的其他车辆行进通过交叉口的组件和功能。
37.根据至少一些所公开的实施例,v2v消息收发协调可用于加强多路交叉口处的交通规则。附加地,根据至少一些所公开的实施例,v2v消息收发可用于提高多路交叉口处的交通流。
38.车对车(v2v)通信技术的标准化基础是基本安全消息(basic safety message,bsm)。bsm包括大量车辆数据,例如全球定位系统(gps)相关数据(包括经度和纬度)、速度、横向和纵向加速度、制动信息、大灯状态、转向信号状态、车辆长度、宽度和质量等。一旦在完全连接的运输车辆中实施,bsm被所有连接的运输车辆以10hz的传输频率广播。可以领会,协作意识消息(cooperative awareness message,cam)也可以由所有连接的运输车辆广播。
39.根据所公开的实施例,bsm/cam数据可用于生成交叉口和该交叉口内和周围的所有车辆的详细视图。然后可以将逻辑应用于该详细视图,以确定运输车辆进入、到达和/或通过交叉口的正确顺序。例如,一旦识别出候选顺序,就可以在运输车辆通过交叉口之前获得与所有其他运输相关车辆的共识。
40.为了在交叉口处的所有运输车辆之间就运输车辆进入、在交叉口处和通过交叉口的顺序获得共识并确保达成协定,所公开的实施例定义了新的安全消息,该消息包含为了确定共识(或缺乏共识)所需的信息,即多路停止消息(“mwsm”)。该mwsm的特定有效载荷格式的一种实现参见附录a。
41.mwsm消息可以以规则的节奏广播,例如大约每秒10次,类似于传统上已知的bsm/cam,以确保运输车辆以最新信息进行通信。
42.根据所公开的实施例,由运输车辆(主车辆或hv)传输的mwsm可以包含运输车辆hv已存储的三个列表(approachlist、stoplist、inconflictzone)的实例,以及一些hv的特定数据、例如自我数据,包括当前车道、目标车道等。附录b包括附录a的mwsm的另一个示例,其中包含在所传输的mwsm中所包含的自我数据的附加细节。
43.根据所公开的实施例,当运输车辆hv从另外的运输车辆(远程车辆或rv)接收mswm时,hv的分析模块首先分析rv的自我数据以确定rv可以归入三个列表中的哪一个。做出该判断后,hv的分析模块将rv的列表与其自己的列表进行比较,以确保列表中的数据一致。如果不一致,那么hv的交叉口导航分析模块可能会进入错误状态。还使用rv的分析模块执行
相同的操作,以达成共识和协定。
44.如果列表一致,那么mwsm可用于确保参与穿过交叉口的所有运输车辆(例如,本示例中的hv和rv)就哪些运输车辆应在三个列表中的哪一个中达成一致。
45.根据所公开的实施例,只要所有车辆都存储了相同的列表,应用(在所附文件中定义的)应用逻辑将导致就车辆通过交叉口(以及更具体地,冲突区)的相同顺序达成一致。
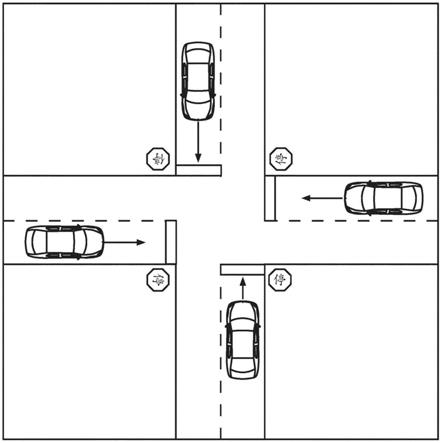
46.图1至图7提供了根据至少一个所公开的实施例的对导航通过交叉口的多个运输车辆的交互进行说明的说明图。
47.如图1所示,作为接近多路交叉口(在此为包括停止标志的四路交叉口)的一部分,至少两个(最多四个)启用c
‑
v2x(即蜂窝v2x)的运输车辆接近交叉口。可以领会,c
‑
v2x是可以结合本公开使用的各种车辆通信技术的示例。例如,本公开可以与dsrc/5g
‑
v2x以及任何当前或即将到来的v2x技术结合使用。c
‑
v2x技术在此仅用于描述特定说明性实施例的目的,并且不旨在进行限制。还需要注意的是,并非所有的运输车辆都是汽车。相反,本发明也适用于其他类型的交通工具,包括摩托车,或者甚至是个人计算设备,其实现在此所公开的针对自行车、踏板车或行人的使用提供所公开的交叉口导航分析模块。
48.作为这个接近阶段的一部分(在此也参照图8、图9和图16进行详细说明),可以执行地图匹配功能,以确定与接近交叉口的hv有关的交通规则是什么。仅出于说明目的,hv被视为进行接收的运输车辆;然而,应当理解,rv可以执行与hv相同的操作,因为该名称只是一个标签,用于表示作为接收数据的一部分来执行的操作。例如,可以执行地图匹配以确定车辆处于具有停止标志、让行标志等的车道中。然后交叉口导航分析模块的软件可以响应于参数被满足而开始监测车辆速度,例如,正在执行估计以确定车辆例如离到达交叉口还有一定的时间。
49.如在此参考在此的图12和图13所解释的,交叉口导航分析模块然后开始匹配接收到的被识别为接近交叉口的其他车辆的bsm/cam。
50.应当理解,与本车在同一行驶车道上的前车、即本车前方的其他车辆在分析中可能会也可能不会被考虑在内。
51.应当理解,交叉口可以配备有一个或多个用于广播地图信息的c
‑
v2x设备。替代地或附加地,可以提供经由无线蜂窝通信技术连接的后端服务以提供地图数据。如果没有接收到地图数据,则可以使用预先定义的地图数据库(例如,如传统已知的那样,存储在运输车辆的导航系统中的地图数据)来执行地图匹配。
52.接近阶段在正在接近的车辆完全停止时结束,作为可能被视为停止阶段的一部分,如图2所示(并参照本文的图8、图10和图17在此进行进一步讨论)。作为停止阶段的一部分,共识协议操作开始从位于交叉口的车辆中确定“最先启动”的候选者。应当理解,可选地,作为该阶段的一部分,可以通过包含在运输车辆中的人机界面(human machine interface,hmi)向运输车辆的驾驶员输出输出通知,该人机界面可以是包含在运输车辆中的信息娱乐系统的一部分。例如,显示器可能会指示“正在接近交叉口:预计还有num辆其他车辆”或类似内容(其中num是指示驾驶员在即将到来的交叉口应该看到的车辆数量的变量)。
53.可选地,停止阶段可以包括通过一个或多个外部基础设施提供的参数来执行的考虑和分析,这些参数可以改变车辆的通信和协作的分散性质。例如,可选地,外部基础设施
计算单元可以被配置为用于监控交通状况并且作为自动交通指挥器进行操作以加速在交叉口处的方向之一上运动的交通。在这样的配置中,基础设施计算单元可以与由一个或多个外部服务所提供的交通监控数据通信并且可以对其进行访问,对交叉口附近的交通灯数据的访问等。结果是,当车辆应该停止、等待和启动以在特定交叉口以外的宏观层面协调交通流时,基础设施计算单元可能能够加速交通并向车辆发出信号。
54.跟随停止阶段,协定阶段包括在此期间车辆就识别从停止进行启动的第一车辆达成协定的操作,如图3所示(并在此参照图8,和图21至图26c进行进一步讨论)。例如,这可以基于谁最先在交叉口完全停下来。作为通过车辆hmi向驾驶员输出的一部分,所有车辆都可以输出停止消息,直到从交叉口处的所有其他车辆接收到共识/反馈为止。
55.在此参考图8提供了关于消息和消息流的更多细节。
56.可选地,在协定阶段,驾驶员可能需要按下物理按钮(其例如在方向盘上)以确认驾驶员知道并同意在穿越交叉口的顺序中指派给驾驶员的运输车辆的角色。
57.随后,车辆以作为启动阶段的一部分协定的顺序来启动或运动,如图4至图7所示(其共同说明了所协定的车辆的启动顺序)。更具体地说,图4说明了第一车辆(车辆1)在其离开其停止位置并通过交叉口冲突区时的启动。图5说明了第二车辆(车辆2)在其离开其停止位置并通过交叉口冲突区时的启动。图6说明了第三车辆(车辆3)在其离开其停止位置并通过交叉口冲突区时的启动。图7说明了第四车辆(车辆4)在其离开其停止位置并通过交叉口冲突区时的启动。在图4至图7所说明的顺序的进程中,一旦交叉口或交叉口冲突区没有车辆,则下一个车辆就会得到进入交叉口的许可(例如,通过在车辆的hmi上输出"如果安全,请通过"的消息)。
58.图8说明了关于取决于车辆作为主车辆(hv)或远程车辆(rv)的相对角色在车辆中执行的消息交换和基本内部处理的附加细节。如图8中所示以及如上所述,可选的基础设施元件可以向hv提供输入,作为由hv执行的处理的一部分。如序列图中所示,rv(和作为rv向其他车辆操作的hv)都广播bsm/cam数据,以使彼此能够将自己识别为连接的v2x车辆。为了响应从rv接收bsm/cam数据,作为接近阶段的一部分,hv将向rv广播其mswm。关于接近阶段的分析和处理操作的附加细节在图9和图16中说明。
59.跟随接近阶段的完成,hv通过hv hmi向驾驶员显示停止消息。跟随hv在交叉口停止,停止阶段进一步包括广播mswm以促成协定阶段。关于在停止阶段期间执行的分析和处理操作的附加细节在图10和图17中说明。此后,一旦就交叉口的启动顺序达成协定,启动阶段就开始,以实现通过交叉口的有序和高效导航,如图4至图7中所说明的。关于启动阶段的分析和处理操作的附加细节在图11和图20中说明。
60.如上所述,根据所公开的实施例的车辆(作为hv)的交叉口导航分析模块匹配所接收的被识别为接近交叉口的其他车辆(rv)的bsm/cam数据,如在此参考图12和图13所解释的。
61.如图12中所示,各种操作与这些数据的接收操作同时执行,各种操作包括:各种循环触发操作(其包括地图匹配和hv状态分析)、用于执行分析以确定启动顺序的各种逻辑操作和用于传输到其他车辆的mwsm生成。
62.图13提供了关于地图匹配和hv状态分析的附加细节,其可能包括在循环触发基础上执行的各种操作,包括hv数据的创建和填充、地图匹配、确定到最近车道的偏移量、确定
hv当前车道、确定基于转向信号状态的hv目标车道、确定到停止位置的距离、以及估计到停止位置的预计抵达时间(estimated time of arrival,eta)。
63.回到图12,各种应用逻辑被包括在交叉口导航分析模块中,以执行操作并提供在此所公开的功能。因此,图14提供了关于图12中提及的应用逻辑的附加细节。该应用逻辑包括但不限于用于检查分析模块的功能的激活的机制(参见图15)以及状态机的使用,该状态机能够在系统的各个阶段或状态之间进行转换,例如接近(参见图16)、停止(参见图17)、启动(参见图20)以及冲突区中的状态(更多细节在图18中示出)。
64.图19提供了关于用于传输到其他车辆的mswm消息的生成的附加细节。如图所示,mswm数据的这种生成和传输涉及作为rv行使职责的操作相对于其它运输车辆执行作为hv的操作,以实现根据所公开的实施例的用于交叉口导航的协作方法和通信。
65.如上面所简要阐述的,根据所公开的实施例,与每个运输车辆相关联地生成、存储和更新多个列表,每个运输车辆被连接并且与所公开地实施例相结合地进行操作。这些列表包括approachlist(接近列表)、stoplist(停止列表)和inconflictzone list(冲突区中列表)。
66.该approachlist包括已确认接近交叉口的运输车辆的无序的列表。运输车辆可以作为上文讨论的图12和图13中详述的地图匹配处理的一部分并在该处理期间被添加到approachlist中。
67.stoplist包括停靠在交叉口处的运输车辆的列表,按照每个运输车辆到达其各自交叉口路段的特定停靠位置的顺序排序(从最早到达的开始,以最晚到达的结束)。
68.inconflictzone list包括行驶中的运输车辆的无序的列表,这些运输车辆正在主动通过交叉口的中心部分,其被称为冲突区,因为该冲突区是交叉口中车辆行驶的路径之间发生冲突的区域。
69.用于生成和维护这些列表的处理操作在图21中更详细地示出。更具体地,跟随接收数据,执行各种数据接收操作。这可能涉及使用类似mws
‑
bsm/cam的数据的rv的地图匹配数据,以及如果匹配结果与接收到的匹配结果不一致则生成错误。操作还包括进行检查以确定接收到的车辆id是否在任何列表(approachlist、stoplist、inconflictzone)中,并将此确定结果存储在存储器中。这些操作还可包括检查接收到的rv车辆速度是否超过静止速度阈值。
70.因此,例如,如果从rv接收到的车辆数据指示rv车辆仍在运动,则如果车辆之前不在列表中,则将车辆添加到approachlist中。然而,如果运动的rv车辆之前在approachlist中,则其会保留在approachlist列表中。如果运动的rv车辆之前在stoplist中,则该车辆将添加到inconflictzone list中。如果运动的rv车辆之前在inconflictzone list中,则其会保留在inconflictzone list中。
71.然而,如果接收到的rv车辆数据表明rv处于停止状态,则列表更新如下。如果静止的rv车辆之前在stoplist中,则其会保留在stoplist中。如果静止的rv车辆之前在inconflictzone list中,则会生成错误或将车辆保留在inconflictzone list中。如果静止的rv车辆之前在approachlist中,则将rv车辆移动到stoplist。随后,如果hv对特定状态的判断与从rv接收到的状态不匹配,则可以利用接收到的标志对目标列表执行交叉检查/验证,以确定是否输出错误,并且可以执行去抖动算法/故障计数以确保计算出的列表和接
收到的列表在一定时间内匹配。
72.随后,可以基于更新的列表计算序号,如更详细地在此参考本文讨论的图22至图26c所公开的。也就是说,可以为stoplist和inconflictzone list中的所有车辆计算序号(冲突区中的所有车辆必须具有序号1,表明其是第一个)。此后,使用接收到的序号对计算出的序号执行交叉检查/验证(同样,如果hv的判断与接收到的状态不匹配,则会输出错误,使用去抖动算法/故障计数来确保计算出的列表和接收到的列表在一定时间内匹配。
73.图22说明了用于计算待与交叉口冲突区处的多个运输车辆中的每一个相关联的序号的操作的示例。可以看出,这些操作涉及确定和比较stoplist和inconflictzone list,以确定待分析的车辆的数量。图23中说明了对两个车辆的分析,并在图24中进一步说明了所结合的比较操作。注意,当交叉口处只有两个车辆时,比较操作只需要进行一次。而当有三个车辆时(如图25a至图25b所说明的),必须进行三次比较操作以确定三个车辆之间的相对顺序。此外,当有四个车辆时(如图26a至图26c所说明的),比较操作必须执行12次,以提供四个车辆之间的相对顺序。
74.在上述附图中,序列图已经在四路停车交叉口的范围内进行了解释;然而,应当理解,所公开的实施例和底层逻辑可以应用于任何大小和复杂度的交叉口。为了应用这里对于四路停车详细描述的解决方案,对于不同大小的交叉口,分析模块只需要创建一个新表,其列出每个兼容的车辆运动组合,并进行调整以进行对新的数量(而不是在此详细描述的四辆)的合格车辆的序号比较。所公开的实施例所需的所有其他功能,例如mswm、列表、处理等,可以如在此所描述地一般实施。
75.认识到并非所有运输车辆都将完全连接以传输和接收v2v和v2x消息收发技术的事实,可以实施所公开的实施例以识别并非在交叉口处的所有车辆都被连接。如果并非在交叉口处的所有运输车辆都被连接,则无法确认所有运输车辆之间的共识。结果是,在此所公开的逻辑可以被禁用,或者替换地,可以被执行以提供一个或多个潜在顺序,以让一个或多个未连接的车辆(即,车辆无法传输和接收v2v和v2x消息收发)穿越交叉口。例如,在此所公开的逻辑可以基于以下一个或多个条件来预测未联网车辆的一个或多个潜在顺序排序:未联网车辆到达多路停车交叉口的时间;来自未联网车辆的视觉、听觉和/或其他感官提示;未联网车辆通过交叉口的预测路径;以及任何其他指示未联网车辆的排序或方向的指示器。可以基于一个或多个未联网车辆的潜在顺序排序来执行联网车辆之间的整体共识。为了防止潜在的冲突,通过已连接的车辆可以基于未连接的车辆在行动中的任何偏差来重新计算和执行顺序排序。
76.因此,在至少一个所公开的实施例中,分析模块可以接收和分析车辆传感器数据(例如,一个或多个车载照相机、lidar等),以确定是否所有附近的运输车辆都与bsm/cam和mwsm通信。因此,应当理解,如果车辆的分析模块确定接近交叉口的另一车辆没有传输数据,则分析模块可以终止为该交叉口提出的交叉口导航方案的制定。替换地,车辆的分析模块可以预测未连接车辆的一个或多个潜在的顺序排序,并判断这些顺序排序之一以达成共识。
77.应当理解,在此公开的由运输车辆或运输车辆的分析模块执行的功能和操作由软件以及一个或多个处理器提供,例如,中央处理单元(cpu)连同一个或更多类型的计算机可访问存储器和在运输车辆内或在运输车辆本身上实现的其他组件。
78.因此,尽管在此未详细讨论,但应当理解,通过软件和硬件实现的分析模块可以耦合到或包含在运输车辆的控制器局域网(controller area network,can)中,以便通过车辆的can总线与用于运输车辆的传感器和控制系统进行通信。因此,应该理解,交叉口导航分析模块可以被实现为全部或部分使用一个或多个电子控制单元(ecu)与一个或多个传感器进行通信,以确定所有运输车辆在交叉口或接近交叉口时是否可以达成共识/协定。
79.在此描述的方法操作和功能可以由软件实现并且作为软件代码编译和存储到存储器。应当理解,在此公开的代码是用c编程语言编写的;但是,没有对任何特定类型的编程语言的具体要求。因此,所公开的实施例及其功能可以以各种不同的编程语言来实现。
80.在运行时,软件可以被一个或多个处理器调用以执行。存储器控制器可以通过存储器与处理器之间的接合来管理数据流。系统或数据总线、例如can总线可以将存储器电子地连接到一个或多个通信网络接口,该通信网络接口允许通过例如专用短程通信(dedicated short
‑
range communication,dsrc)来无线地传输和接收mwsm数据。
81.因此,应当理解,虽然没有详细公开,但每个车辆都可以具有id生成系统,该id生成系统生成可用于车辆监控目的的车辆识别信息。识别信息例如可以包括时间戳、车辆位置,例如通过gps坐标和与gps坐标相关的时间戳。如上所述,这是v2x技术中bsm/cam的基础。
82.所公开的实施例可以结合包含在运输车辆中的自主驾驶系统和驾驶员辅助系统的组件来实施。因此,已经详细描述了在那些技术范围内所公开的实施例的应用。然而,在此公开的创新设计的范围不限于那些技术范围。此外,应当理解,驾驶员辅助和/或自主驾驶功能可以由可以采用的车辆控制系统来提供,其中驾驶员可以选择或超越由交叉口导航分析模块所生成的选择。
83.如图27所示,交叉口导航分析模块2700可以包括一个或多个处理器2710,其与一个或多个存储器2720耦合,并且与运输车辆的can 2730耦合或实现在其内。该交叉口导航分析模块2700可以类似地耦合到一个或多个车辆传感器2740和收发器2750以通过通信技术与其他车辆、基础设施和组件通信以实现v2x消息收发,特别是对mwsm数据的传输和接收以及分析。
84.应当理解,交叉口导航分析模块可以使用包含在运输车辆中的专用的或共享的硬件来实现。因此,在不脱离本发明的范围的情况下,模块的组件可以被运输车辆的其他组件使用以提供车辆功能。
85.提供示例性的实施例是为了使得本公开将是透彻的,并且其将向本领域的技术人员完全传达其范围。阐述了许多特定细节,例如特定组件、设备和方法的示例,以提供对本公开的实施例的透彻理解。在一些说明性实施例中,不详细描述公知的工艺、公知的器件结构和公知的技术。
86.技术在此仅用于描述特定说明性实施例的目的,并且不旨在进行限制。元件的单数形式可能旨在包括复数形式,除非上下文另有指示。在此描述的方法步骤、过程和操作不应被解释为必然要求它们以所讨论或所说明的特定顺序执行,除非具体标识为执行顺序或特定顺序固有地对于实施例可被操作是必要的。还应当理解,可以采用附加的或替代的步骤。
87.根据本公开的实施例包括在此描述的方法及其等同物、被编程为执行方法的非瞬
态计算机可读介质以及被配置为执行方法的计算机系统。进一步包括的是车辆,其包括包含任何方法的组件、被编程以实施指令或实施方法的非瞬态计算机可读介质、以及实施方法的系统。计算机系统和任何子计算机系统将通常包括包含可执行代码的机器可读的存储介质;一个或多个处理器;耦合到一个或多个处理器的存储器;输入设备和连接到用于执行代码的一个或多个处理器的输出设备。机器可读的介质可以包括用于以机器可读的形式存储或传输信息的任何机构,例如计算机处理器。例如,信息可以存储在易失性或非易失性存储器中。
88.模块、数据结构等是为了便于讨论而如此称呼的,并不意在暗示需要任何特定的实现细节。例如,任何所描述的模块或数据结构可以根据特定设计或实现的需要被组合或划分为子模块、子过程或计算机代码或数据的其他单元。在附图中,为了便于描述,可以示出示意性元件的特定布置或排序,但是可以适当地修改以实现本公开的实施例。通常,用于表示指令或模块的示意性元件可以使用任何合适形式的机器可读指令来实现,并且每个这样的指令可以使用任何合适的编程语言、库、api或其他软件开发工具或框架来实现。类似地,可以实现所描述的元件的任何合适的电子布置或数据结构。此外,元件之间的一些连接、关系或关联可以被简化或未在附图中示出,以免混淆本公开。
89.还应当理解,在此所使用的术语“模块”并不将功能限制于特定的物理模块,而是可以包括任何数量的有形体现的软件或硬件组件。模块将通常具有有形的计算机可读介质,该有形的计算机可读介质具有体现在其中的计算机可读的程序代码,其中计算机可读的程序代码适于由处理器(与操作系统结合工作)执行以实现模块的一个或多个功能和方法。在这方面,程序代码可以以任何合适的语言并作为任何合适类型的代码来实现。模块还可以包括协同工作以执行预期功能的多个模块。
90.已经描述了本发明的各种实施例,每个实施例具有不同的元件组合。本发明不限于所公开的具体实施例,并且可以包括所公开的元件的不同组合、一些元件的省略或由这些结构的等效物替换元件。
91.实施例包括在此描述的方法及其等同物、被编程为执行方法的非瞬态计算机可读介质以及被配置为执行方法的系统。进一步包括的是一种车辆,该车辆包括包含在此所公开的实施例的任何组件或其他实施例的组件的组件。当前公开的系统和任何子计算机系统包括包含可执行代码的机器可读的存储介质;一个或多个处理器;耦合到一个或多个处理器的存储器;输入设备和连接到一个或多个处理器的输出设备。该系统和方法可以在服务器或其他通信网络或系统上进行协调。
92.尽管已经以具有一定程度的特殊性的示例性形式描述和说明了某些实施例,但是应当注意,描述和说明仅通过示例的方式进行。部分和操作的构造、组合和布置的细节可能会发生许多变化。因此,此类变化旨在包括在本公开的范围内,其保护范围由权利要求限定。
93.下面更详细地描述图1至图27。
94.图1至图7示出了四辆配备c
‑
v2x的运输车辆的鸟瞰图的示例说明,其通过c
‑
v2x消息主动协调运输车辆如何在四路停车交叉口行进。c
‑
v2x消息可以包括上述的bsm(基本安全消息)/cam(合作意识消息)和上述的mwsm(多路停止消息),其在配备c
‑
v2x的运输车辆中的主车辆(hv)与一个或多个远程车辆(rv)之间传输。为了实现主动协调,每个车辆包括组
件和功能,例如上述的交叉口导航分析模块。图1至图7所示出的四路交叉口包括四条路或路段,每条路具有两条车道。第一车道可以表征为针对接近交叉口的车辆的到达车道,而第二车道可以表征为针对离开交叉口的车辆的出发车道。第一车道包括停止属性,例如接近的车辆必须在穿过交叉口之前停止的停止标志。
95.图1示出了在四路停车交叉口处来自不同方向(因此每个来自不同的第一车道)的四个上述的车辆的接近阶段。为了确定相应车辆是否在带有停止标志的车道中,可以执行地图匹配功能。然后,如果与由停止标志确定的预定停止位置或停止位置相距几秒钟,则每个车辆的交叉口导航分析模块开始监控车辆速度。随后,每个车辆的交叉口导航分析模块开始匹配接收到的所有其他接近的车辆的bsm。
96.如图2中所示,当所有车辆在预定义的停止位置完全停止时(停止阶段),根据图1的接近结束,并且共识协议操作开始确定“最先启动”。
97.图3示出了协定阶段,在该协定阶段中车辆协定最先从停止位置启动的车辆。优选地,车辆还可以就一个接一个地启动的顺序或排名达成一致。以下,最先启动的车辆称为第一车辆,第二启动的车辆称为第二车辆,第三启动的车辆称为第三车辆,并且第四启动的车辆称为第四车辆。如图3中所示,可以通过上述的hmi(人机界面)向相应车辆的驾驶员输出输出通知。hmi被显示为每个车辆的仪表板中的显示器。取决于相应车辆是否是上述的第一车辆,通知可以显示“停”或“走”消息。如图3中所示,协定了车辆1作为第一车辆。因此,车辆1的hmi向驾驶员显示“走”消息。同时,2、3、4号车辆的hmi向驾驶员显示“停”消息,指示保持在停止位置。
98.图4中示出了车辆1的随后出发。因此,车辆1的驾驶员可以加速并以所期望的方向(例如直行)进入交叉口。当车辆1进入交叉口时,车辆1的hmi终止显示通知信息。车辆2、3和4仍保持在停止位置,并且仍向相应的驾驶员显示“停”消息。
99.一旦交叉口畅通,即车辆1离开了交叉口冲突区,根据协定阶段协定作为第二车辆启动的第二车辆获得进入交叉口的许可,如图5中所示。因此,第二车辆的hmi从显示“停”消息切换到显示“走”消息。于是,第二车辆的驾驶员可以加速并以期望的方向(例如直行)进入交叉口。图5中,车辆2被示为上述的第二车辆。同时,车辆3和4仍保持在停止位置,并且仍向相应的驾驶员显示“停”消息。
100.图6示出了第三车辆获得许可进入交叉口的情况。一旦交叉口畅通,即车辆2离开了交叉口冲突区,根据协定阶段协定作为第三车辆启动的第三车辆的hmi从显示“停”消息切换到显示“走”消息。然后,第三车辆的驾驶员可以加速并以期望的方向(例如直行)进入交叉口。图6中,车辆3被示为上述的第三车辆。同时,车辆4仍保持在停止位置,并且仍向相应的驾驶员显示“停”消息。
101.最后,在车辆3清空了交叉口冲突区且交叉口畅通后,根据协定阶段协定作为最后的车辆启动的第四车辆获得进入交叉口的许可,如图7中所示。图7中,车辆4被示为上述的第四车辆。为了允许驾驶员进入交叉口,车辆4的hmi从显示“停”消息切换到显示“走”消息。于是,第四车辆的驾驶员可以加速并以期望的方向(例如直行)进入交叉口。
102.根据仍然位于交叉口的所有车辆中的优选实施例,最先停在相应停止位置的车辆可以是上述的hv,而所有其他车辆可以是上述的rv。
103.图8中显示了序列图,该序列图概述了四个参与者之间的消息交换,以如前所述协
调在多路交叉口的启动。在该示例性说明中,第一参与者可以是基础设施,并且第二和第三参与者可以是车辆。特别地,第二参与者可以是远程车辆(rm)并且第三参与者可以是主车辆(hv)。第四参与者可以是hv的hmi。
104.根据图8中的序列图的消息交换可以如下进行。当hv和rv接近交叉口时,基础设施向hv广播map消息。map消息可以包括关于上述的停止属性的存在的信息。例如,基础设施可以通过map消息向hv提供数字地图(地图数据或地图信息)。接收map消息触发hv的地图匹配功能。因此,hv根据第一条件验证其是否停留在具有停止属性的车道(on lane with stop sign,具有停止标志的车道)。此外,hv确定到达停止位置的到达时间(toa)并根据第二条件验证toa是否小于特定的阈值时间(t_thresh_from_stop_location)。
105.如果两个条件都得到确认,则启动hv的第一活动。在第一活动期间,用于协调在多路交叉口启动的应用程序由hv来激活(application start,应用程序启动),并且hv执行bsm匹配功能(bsm matching,bsm匹配)。为了执行bsm匹配,rv向hv提供bsm。因此,hv和rv能够将彼此识别为连接的v2x车辆。
106.接收到bsm消息后,第一活动终止,并且hv向主车辆hmi提供消息以显示预定义的接近交互(display approach interaction,显示接近交互)。
107.之后,上述接近阶段作为hv的第二活动被触发。将关于图9更详细地解释接近阶段的程序流程。作为接近阶段的一部分并且在第二活动期间,hv向rv广播第一mwsm。第一mwsm的内容可能只涉及有关hv接近停止位置的语义信息(only approachcontainer,仅接近容器)。
108.一旦第二活动结束,接近阶段就终止,并且hv向主车辆hmi提供消息以显示预定义的停止交互(display stop interaction,显示“停”交互)。
109.此后是所述停止阶段,该停止阶段作为hv的第三活动被触发。将关于图10更详细地解释接近阶段的程序流程。作为停止阶段的一部分并且在第三活动期间,hv向rv广播第二mwsm。作为响应,rv也广播第一mwsm。hv的第二mwsm和rv的第一mwsm都可以包括关于车辆接近其各自的停止位置的语义信息,以及关于车辆各自的停止顺序(停车或刹车程序的启动)的语义信息(approach
‑
and stoppedsequence container,接近和停止顺序容器)。此外,rv还广播了第二mwsm,其可能只涉及关于rv的停止顺序的语义信息(only stoppedsequence container,仅停止顺序容器),特别是在rv的停止位置处完全停止的时间。
110.接收到rv的第二mwsm后,终止第三活动并且完成停止阶段。随后,hv向主车辆hmi提供消息以向驾驶员显示预定义的启动交互(display launch interaction,显示“启动”交互)。
111.之后,所述启动阶段作为hv的第四活动被触发。将关于图11更详细地解释启动阶段的程序流程。作为启动阶段的一部分并且在第四活动期间,hv向rv广播第三mwsm。第三mwsm的内容可能只涉及关于hv从停止位置到交叉口冲突区(idlnconflictzone)的启动的语义信息。特别地,hv的第四mwsm可能表明hv已经离开了交叉口冲突区。
112.rv接收到第三mwsm终止了第四活动,并且启动阶段完成。随着启动阶段的完成,终止了四个参与者之间的用于根据图8在多路交叉口处协调启动的消息交换。
113.图9至图11分别更详细地示出了从接近多路交叉口的某一车辆(例如所描述的hv)
的角度描述接近阶段、停止阶段和启动阶段的程序流程的流程图。
114.根据图9的接近阶段以开始步骤开始。在接下来的第一决策步骤中,车辆速度与预定义的静止阈值进行比较(vehicle speed<standstill threshold?,车辆速度<静止阈值?)。如果车辆速度小于静止阈值,则接近阶段终止并且该处理以停止阶段继续。然而,如果车辆速度大于或等于静止阈值,则流程以第二决策步骤继续。在第二决策步骤中,验证用于广播mwsm的预定时间(t_msggen)是否小于从当前时间(t)中减去上一次发送mwsm的时间(t_lastmsg)的差。这将确保mswm以有规律的节奏广播。如果否,则流程返回到第二决策步骤,并重复有关消息生成时间的查询。如果是,则流程继续访问所有匹配的bsm车辆的列表。该列表可包括车辆周围预定义的周围区域内所有配备v2x的车辆的id,这些车辆正与该车辆一起接近交叉口。在接下来的活动步骤中,接近的车辆的车辆id被添加到vehicleinapproach(车辆驶近)容器中。vehicleinapproach容器可以表示列表或数据对象,该列表或数据对象包括在预定时间段内与接近的车辆一起接近交叉口的所有车辆的车辆id。优选地,vehicleinapproach容器可以表示前面描述的approachlist。此外,在vehiclesstopsequence(车辆停止顺序)容器中也确认了接近的车辆的车辆id。vehiclesstopsequence容器可以表示列表或数据对象,该列表或数据对象包括已停在相应停止位置的所有车辆的车辆id,而这些id按车辆到达其相应停止位置的时间排序。优选地,vehiclesstopsequence容器可以表示之前描述的stoplist。之后,流程继续第三决策步骤,以验证是否有更多匹配的id可用。如果是,则流程返回访问匹配的bsm车辆的列表,以添加更多车辆id。如果否,则流程继续执行活动步骤,在该步骤中,车辆广播其关于接近交叉口的mwsm。在广播mwsm之后,流程返回到第二决策步骤,并从那里重复该处理。
115.根据图10的停止阶段以开始步骤开始。在随后的第一活动步骤中,设置hv到达车辆的相应停止位置的时间并且流程继续第二活动步骤。在第二活动步骤中,到达时间和车辆(尤其是车辆id)被添加到vehiclesstopsequence容器(stoplist)中。该流程继续进行排序步骤,其中,vehiclesstopsequence容器中接收到的车辆(车辆id)根据其到达停止位置的时间进行排序。之后流程继续第三活动步骤并且hv广播mwsm。在随后的第一决策步骤中,验证vehiclesstopsequence容器中列出的与匹配的bsm车辆列表中的车辆相匹配的所有车辆是否停止。如果不是,流程继续进行第四活动步骤,而在交叉口所有停止的车辆中最先启动的车辆被设置为proposedlaunchvehicle(提议的启动车辆),同时考虑到已经在交叉口冲突区(idlnconflictzone)中的一个(或多个)车辆。冲突区中的车辆可能会列在如前所述的inconflictzone list中。然后流程返回到第二活动步骤。如果是,则流程继续进行第二决策步骤,以根据vehiclesstopsequence列表验证该车辆是否是第一车辆。如果否,则流程继续上述第四活动步骤。如果是,则流程继续进行第三决策步骤,以验证该车辆是否是最先启动的车辆,即proposedlaunchvehicle。如果否,则流程继续上述第四活动步骤。如果是,则流程继续进行第四决策步骤,以验证所有其他车辆的响应是否确认该车辆被提议为最先启动的车辆。如果否,则流程继续上述第四活动步骤。如果是,则前进是安全的,停止阶段终止,并且处理继续进行启动阶段。
116.根据图11的启动阶段以开始步骤开始。在第一决策步骤中,验证车辆速度是否大于静止阈值。如果否,则流程返回到第一决策步骤。如果是,则流程继续进行第一活动步骤,以便为idlnconflictzone设置车辆id。之后流程继续进行第二活动步骤并且由车辆广播
mwsm。在随后的决策步骤中,验证车辆是否已离开交叉口冲突区。如果否,则流程返回到第一活动步骤。如果是,则该处理在停止步骤中终止并且车辆的启动阶段完成。
117.图12至图21c说明了由交叉口导航分析模块为车辆(例如hv)执行的操作或过程,以匹配从识别为接近交叉口的其他车辆(例如rv)接收到的bsm/cam数据,并更详细地协调其启动。
118.如图12中所说明的,两个流程图描述了关于上述approachlist、stoplist和inconflictzone list的列表维护的附加细节,以及从地图匹配到hv的mwsm生成的概览处理。图12的流程图中所说明的处理或操作可以同时执行。
119.列表维护处理以开始步骤开始,接着是第一活动步骤,其中交叉口分析模块可以从所谓的pc5通信模块为该psid(provider service identifier,提供商服务标识符)接收数据。接收到的数据可以是上述的bsm/can数据和/或mwsm。然后流程继续进行称为onrx列表维护的预定处理,关于图21a至图21c有更详细的解释。
120.根据图12的概览处理也以开始步骤开始,其后是用于激活循环触发器的第一激活步骤。流程继续第一预定义处理,其被称为地图匹配和hv状态提供者,关于图13有更详细的解释。第一预定义处理提供了有关hv和rv的地图匹配的附加信息以及对hv状态的分析。如前所述,地图匹配和hv的状态分析的操作可以在循环触发器上执行。在地图匹配和hv状态分析之后,流程继续进行称为应用逻辑的第二预定义处理,关于图14至图18和图20有更详细的解释。该第二预定义处理提供了关于如何可以实现hv和rv的阶段(例如,接近阶段、停止阶段、启动阶段)之间的转变的附加信息。在应用逻辑处理之后,流程继续进行关于mws消息生成的第三预定义处理,关于图19有更详细的解释。该第三预定义处理提供了附加信息,即如何可以生成mwsm并将其传输到作为rv的其他车辆。最后,流程返回到循环触发器激活并且该处理从头继续。
121.如前所述,图13说明了地图匹配和hv状态提供者的处理。匹配hv状态分析的地图可以包括在循环触发的基础上执行的各种操作。操作可以是:创建和填充hv数据、例如mwsm;关于从rv接收到的bsm/cam数据执行地图匹配;确定到最近车道的偏移量;确定hv的当前车道;基于转弯信号状态确定hv的目标车道;确定到停止位置的距离;和在停止位置执行对toa的估计。
122.为了执行地图匹配,交叉口导航分析模块可以验证每个接近的车辆在预定义的边界框内的位置。边界框可以由四路交叉口的每条路或路段的尺寸给出,如图13所示。附加地,该模块可以验证每个车辆的方向在用于确定接近交叉口的有效航向范围内。优选地,交叉口导航分析模块还可以考虑从第一和第二车道各自的中间条纹周围的预定义的中心出发的+/
‑
10度角,以验证第一车道中车辆的方向。
123.图14以流程图的形式说明了上述应用逻辑处理,描述了对由交叉口导航分析模块提供的状态机的操作以协调交叉口处的启动。流程以开始步骤开始,然后是决策步骤。决策步骤包括通过查询称为activate_mws_app的预定义的变量的状态(activate_mws_app==true?)来验证交叉口导航分析模块的mwsm应用是否被激活。如果否,则流程继续进行称为appl:check app activation(检查应用程序激活)的第一预定义处理,以确认应用的功能。关于图15更详细地描述了appl:check app处理。执行appl:check app activation处理后,流程继续进行结束步骤,并且应用逻辑处理被终止。然而,如果activate_mws_app为真,则
流程继续进行第一活动步骤,而交叉口导航分析模块的状态机选择或确定车辆(hv)的当前状态并将其存储在预定义的变量中,称为currentstate。可能的状态是:state_approach,表明车辆处于接近阶段;state_stop,表明车辆处于停止阶段;state_launch,表明车辆处于启动阶段;以及state_inconflictzone,表示该车辆已进入交叉口冲突区。在当前状态选择之后,流程继续进行第二活动步骤,以将称为last_state的预定义的变量的值设置为先前确定的当前状态。如果last_state设置为state_approach,则流程继续进行第二预定义处理,称为appl:approach,其描述状态机的接近操作。关于图16更详细地描述了appl:approach处理。但是,如果last_state设置为state_stop,则流程继续进行称为appl:stop的第三预定义处理,其描述状态机的停止操作。关于图17更详细地描述了appl:stop处理。但是,如果last_state设置为state_launch,则流程继续进行称为appl:launch的第四预定义处理,其描述状态机的启动操作。关于图20更详细地描述了appl:launch处理。最后,如果last_state设置为state_inconflictzone,则流程继续进行第二预定义处理,称为appl:inconflictzone,其描述状态机在冲突区中的操作。关于图18更详细地描述了appl:inconflictzone处理。在执行appl:approach处理或appl:stop处理或appl:launch处理或appl:inconflictzone处理之后,流程继续进行结束步骤,并且应用逻辑处理被终止。
124.图15提供了关于上述appl:check app activation处理的附加的详细信息,如流程图所说明的。该流程从开始步骤开始,然后是决策步骤以验证车辆的地图匹配后的位置的距离是否等于或小于匹配后的车道的长度。为此目的,如前所述,交叉口导航分析模块可以确定车辆位置是否在边界框内并且其方向是否在有效航向范围内以确定接近停止位置。如果否,则流程继续进行结束步骤并且appl:check app activation处理被终止。如果是,则流程继续进行第一活动步骤,并且上述activate_mws_app变量被设置为真。然后流程继续进行第二活动步骤,其中currentstate变量被设置为state_approach。最后,流程继续进行结束步骤并且appl:check app activation处理被终止。
125.图16提供了关于上述appl:approach处理的附加的详细信息,如流程图所说明的。流程以开始步骤开始,接着是第一活动步骤,以将存储在数据对象或数据结构m_egodata中的数据副本添加到数据对象或数据结构m_approachlist中。m_approachlist可以表示先前描述的approachlist。m_egodata可以包括关于车辆的详细信息或字段,例如:时间戳[s]、位置(例如纬度[deg]、经度[deg]、航向[deg])、速度(例如纵向速度[m/s]、横向速度[m/s])、加速度(纵向加速度[m/ss]、横向加速度[m/ss])、灯状态(例如转向信号状态、刹车灯[bool])、地图匹配(例如匹配车道的id、到停止位置的距离[m]、目标车道的id)和mwsdata(例如eta、停止时间、序号、序号验证、在冲突区中?)。之后流程继续进行第一决策步骤,以验证车辆速度(vehicle_speed)是否等于或小于静止阈值(standstill threshold)。如果否,则流程继续进行结束步骤并且appl:approach处理被终止。如果是,则流程继续进行第二决策步骤,以验证到停止位置的距离(dist_stop_location)是否等于或小于到停止位置的预定义的距离阈值(stop_location_threshold)。如果否,则流程再次继续进行结束步骤。如果是,流程继续进行第二活动步骤,并且状态机的当前状态设置为state_stop。最后,流程继续进行结束步骤并且appl:approach处理被终止。
[0126]
图17提供了关于上述appl:stop处理的附加的详细信息,如流程图所说明的。该流程以开始步骤开始,然后是第一决策步骤,以验证是否为车辆设置了停止时间(stoptime)。
如果否,则流程继续进行第一活动步骤并记录停止时间。此外,将存储在m_egodata中的数据副本添加到数据对象或数据结构m_stoplist中,并从m_approachlist中删除车辆(尤其是车辆id)。m_stoplist可以表示如前所述的stoplist,并且因此可以作为交叉口处所有车辆根据其停止时间的排序列表来实现。如果是,则流程继续进行第二活动步骤,并且更新存储在m_stoplist中的m_egodata的数据。之后,流程继续进行第一决策步骤以确定车辆的序号(sequencenumber)是否等于1。在该步骤中,优选地,stoplist中的每个车辆都被指派有序号。序号可以在onrx列表维护处理中指派。如果停止标志处只有一个车辆,则该车辆会自动继续行驶。只要在交叉口,每个车辆都可以保持其序号。如果序号不等于1,则流程继续进行结束步骤并且appl:stop处理被终止。但是,如果序号等于1,则流程继续进行第三活动步骤,并且状态机的当前状态设置为state_launch。最后,流程继续进行结束步骤并且appl:approach处理被终止。
[0127]
图20提供了关于上述appl:launch处理的附加的详细信息,如流程图所说明的。该流程以开始步骤开始,然后是第一决策步骤,以验证last_state是否设置为state_lauch。如果否,则在第一活动步骤中将启动计时器(m_launchtimer)设置为当前时间,并且流程继续进行第二决策步骤。如果是,则流程直接继续进行第二决策步骤,其中交叉口导航分析模块确定从当前时间减去存储的启动时间的差是否大于预定义的启动定时器阈值((currenttime
‑
mlaunchtimer)>launchtimerthreshold?)。如果是,流程继续进行第二活动步骤,以将车辆移动到m_stoplist的底部。然后流程继续第三活动步骤,其中状态机的当前状态设置为state_stop。随后流程继续进行结束步骤并且appl:launch处理被终止。然而,如果从currenttime中减去的m_launchtimer等于或小于launchtimerthreshold,则流程继续进行第三决策步骤,以验证车辆速度是否大于预定义的静止阈值(vehicle speed>standstill threshold)。如果否,则流程可以优选地返回到第三决策步骤。如果是,则流程优选地继续进行第四活动步骤,并且将来自m_egodata的数据副本添加到数据对象或数据结构m_inconflictzone。m_inconflictzone可以表示如前所述的inconflictzone list。然后流程继续进行第五活动步骤,并且状态机的当前状态设置为state_inconflictzone。最后,流程继续进行结束步骤并且appl:launch处理被终止。
[0128]
图18提供了关于上述appl:inconflictzone处理的附加的详细信息,如流程图所说明的。流程以开始步骤开始,然后是第一决策步骤,以验证匹配的车道的id是否等于目标车道的id(matched lane id==target lane id?)。如果否,则流程继续进行结束步骤并且appl:inconflictzone处理被终止。如果是,则流程继续第一活动步骤,并且从m_egodata中删除上述mws_data的数据。然后流程继续进行第二活动步骤,在该步骤中,将变量activate_mws_app设置为假(false)。最后,流程继续进行结束步骤并且appl:inconflictzone处理被终止。
[0129]
图19提供了关于上述mws消息生成处理的附加的详细信息。mws消息生成处理如流程图所说明。该流程以开始步骤开始,然后是第一决策步骤,以确定从当前时间减去最后发送mwsm的时间的差是否大于预定义的消息传输阈值时间((currenttime
–
m_lastmsgsent)>msgtransmissiontimerthreshold?)。如果否,则流程继续进行结束步骤,并且mws消息生成处理终止。如果是,则流程继续进行第一活动步骤,并且从m_egodata收集有关mws和/或bsm数据的内容。然后流程继续进行第二决策步骤,以验证activate_mws_app变量是否设置为
真。如果是,则流程继续进行第二活动步骤,在该步骤中,来自m_approachlist、m_stoplist和m_inconflictzone list的相关数据被提供为mws消息的内容(复制到mws消息)。之后流程继续进行第三活动步骤。但是,如果activate_mws_app变量设置为假,则流程直接继续进行第三活动步骤。在第三活动步骤中,mws消息被传输到相应的车辆(rv)。在接下来的第四活动步骤中,发送最后的mwsm(m_lastmsgsent)的时间被设置为当前时间。最后,流程继续结束步骤,并且mws消息生成处理终止。
[0130]
图21a到图21c提供了关于上述onrx列表维护处理的附加的详细信息。onrx列表维护处理如流程图所说明。根据图21c的流程以开始步骤开始,接着是第一活动步骤,在该步骤处,在mws消息容器存在的情况下,交叉口导航分析模块执行对从所有其他车辆传入的mws和/或bsm之类的数据的地图匹配,以及估计所估计的到达时间(eta)。然后流程继续进行第一决策步骤,以确定匹配后的车道的id(matchedlane_id)是否对应于接收到的所有其他车辆的匹配后的车道的id。如果地图匹配结果与接收到的地图匹配结果不一致,则交叉口导航分析模块进入错误状态。如果是,则流程继续进行第二决策步骤,以确定车辆是否在任何上述内部列表中,例如approachlist、stoplist和/或inconflictzonelist。如果是,则流程继续进行第二活动步骤,并且交叉口导航分析模块存储或记住车辆所在的列表。然后流程继续进行第三决策步骤,如图21b中所说明的。然而,如果车辆不在内部列表中,则流程直接继续进行第三决策步骤。在第三决策步骤中,验证车辆速度是否等于或大于静止阈值(vehicle speed>=standstill speed threshold?)。根据验证的结果,流程或主流程分为两个不同的子流程。
[0131]
如果验证显示车辆速度等于或大于静止阈值,则流程继续第一子流程。第一子流程包括第四决策步骤,用于根据接收到的车辆bsm和/或mws数据确定接收到的车辆、尤其是车辆数据之前是否已经存储在任何列表中。如果否,则在第三活动步骤中将接收到的车辆(数据)添加到m_approachlist并且第一子流程返回到主流程。如果是,则第一子流程继续进行第五决策步骤,在该步骤中确定接收到的车辆(数据)之前是否已经存储在m_approachlist中。如果是,则在第四活动步骤中将接收到的车辆(数据)留在m_approachlist中,并且第一子流程返回到主流程。如果否,则第一子流程继续进行第六决策步骤,以确定接收到的车辆(数据)之前是否已存储在m_stoplist中。如果是,则在第五活动步骤中将车辆(数据)添加到m_inconflictzone并且第一子流程返回到主流程。如果否,则第一子流程继续进行第七决策步骤,以确定接收到的车辆(数据)之前是否已存储在m_inconflictzone中。如果是,则在第六活动步骤中将接收到的车辆(数据)留在m_inconflictzone中,并且第一子流程返回到主流程。如果否,则交叉口导航分析模块进入错误状态。
[0132]
然而,如果验证显示车辆速度小于静止阈值,则流程继续进行第二子流程。第二子流程包括第八决策步骤,以确定接收到的车辆(数据)之前是否已存储在m_stoplist中。如果是,则在第七活动步骤中将接收到的车辆(数据)留在m_stoplist中,并且第一子流程返回到主流程。如果否,则第二子流程继续进行第九决策步骤,以确定接收到的车辆(数据)之前是否已存储在m_inconflictzone中。如果是,则交叉口导航分析模块进入错误状态。如果否,则第二子流程继续进行第十决策步骤,以确定接收到的车辆(数据)之前是否已存储在m_approachlist中。如果是,则在第八个活动步骤中将接收到的车辆(数据)添加到m_
stoplist并且第二子流程返回到主流程。如果否,则交叉口导航分析模块进入错误状态。
[0133]
主流程的继续在图21c中说明,具有第九活动步骤,在该步骤中,来自接收到的车辆(数据)的计算出的列表位置与从mws消息接收到的列表位置交叉验证。可以应用滞后或去抖动算法或失败计数来确保计算出的列表和接收到的列表在预定时间内匹配。然后流程继续进行第十一决策步骤,以确定由hv计算出的列表与从rv接收到的列表是否匹配。如果否,则交叉口导航分析模块进入错误状态。如果是,则流程继续进行称为计算序号(compute sequence numbers)的预定义的处理。在计算序号处理中,计算用于stoplist和inconflictzone list中所有车辆的序号,并分配交叉口处车辆的排名或顺序。请注意,已经在冲突区中的车辆或有最先启动许可的车辆分配有序号“1”(sequencenumber==1)。第二、第三或第四启动的车辆分别分配有序号“2”、“3”或“4”。关于图22更详细地描述了计算序号处理。之后流程继续进行第十二决策步骤,以确定根据计算序号处理计算出的序号与接收到的rv的序号是否匹配。如果否,则交叉口导航分析模块进入错误状态。如果是,则流程继续进行结束步骤并且onrx列表维护处理终止。
[0134]
图22提供了关于上述计算序号处理的附加的详细信息。计算序号处理用流程图来说明。该流程以开始步骤开始,接着是第一活动步骤,在该步骤中,车辆(优选地交叉口处的所有车辆)的基本序号被设置为“0”(base_seqnum==0)。然后流程继续第一决策步骤,以根据inconflictzone list验证冲突区中是否已经有任何车辆。如果是,则流程继续进行第二活动步骤,在该步骤中,所有已经进入交叉口的车辆(在inconflictzone list中的所有车辆)都被指派有序号“1”。在随后的第三活动步骤中,这些车辆的基本序号被设置为“1”(base_seqnum==1)。然后流程继续进行第二决策步骤。然而,如果在冲突区没有检测到车辆,则流程直接继续进行第二决策步骤。在第二决策步骤中,确定stoplist中而不是inconflictzone list中的车辆数量。如果在stoplist和inconflictzone list中没有车辆(确定的结果是“0”),则流程继续进行结束步骤并且计算序号处理终止。如果在stoplist中有一个车辆但不在inconflictzone list中(确定的结果是“1”),则流程继续进行第四活动步骤,并且唯一车辆的序号被指派有基本序号(base_seqnum)加上“1”(s[0]
→
base_seqnum+1)的值。如果有两个车辆(s[0]、s[l])在stoplist中而不在inconflictzone list中(确定的结果是“2”),则流程继续进行称为getseqnums:2_vehicles的预定义的处理,在此处理中确定用于协调两个车辆在交叉口处的启动的序号。关于图23更详细地描述getseqnums:2_vehicles处理。如果有三个车辆(s[0]、s[l]、s[2])在stoplist中而不在inconflictzone list中(确定的结果是“3”),则流程继续进行称为getseqnums:3_vehicles的预定义处理,在此处理中确定用于协调三个车辆在交叉口处的启动的序号。关于图25a和图25b更详细地描述getseqnums:3_vehicles处理。最后,如果有四个车辆(s[0]、s[l]、s[2]、s[3])在stoplist中而不在inconflictzone list中(确定的结果是“4”),则流程继续进行称为getseqnums:4_vehicles的预定义处理,在此处理中确定用于协调四个车辆在交叉口处的启动的序号。关于图26a至图26c更详细地描述getseqnums:4_vehicles处理。
[0135]
图23提供了关于上述getseqnums:2_vehicles处理的附加的详细信息。getseqnums:2_vehicles处理用流程图来说明。该流程以开始步骤开始,然后是第一决策步骤,以确定如果两个车辆可能同时进入交叉口则是否可能发生冲突或碰撞。为了确定可能的冲突,在预定义的比较处理中比较每个车辆(v1和v2)的实际位置和预期方向。
[0136]
比较处理的一种可能实现方式在图24中说明。通过使用查找表的预定义的比较函数(函数比较(v1,v2)),将车辆预期方向相对于其实际位置进行比较。在查找表中,第一行的航向字段示出了v1(第一车辆)相对于v1的开始位置的预期方向。结合v2相对于v2的开始位置的预期方向,查找表中第一列的航向字段示出了v2(第二车辆)相对于v1的位置的开始位置。根据查找表,v1和v2的预期方向是:直行(
↑
)、右(
→
)和左(
←
)。如果只有一个车辆在交叉口,根据查找表,v2的开始位置相对于v1的位置的开始位置为:右(r)、左(l)、直行(a)和没有其他车辆。由两个航向字段包围的查找表的结果字段指示如果两个车辆一起进入交叉口则是否可能发生冲突或碰撞。为了指示没有冲突或碰撞,相应的结果字段示出了核选标记符号(√)。指示碰撞的结果字段留空。基于查找表,可以执行前述比较功能以根据车辆的预期方向和相对位置来获取或读出结果字段的条目。如果读取的结果是核选标记符号,则比较函数返回“y”(是),表示将不会发生碰撞。否则,比较函数返回“n”(否),表示可能发生冲突。
[0137]
关于图23中的getseqnums:2_vehicles处理,如果比较处理(特别是比较函数)返回“y”,则流程继续进行第一活动步骤,并且两个车辆的序号被分配以各自的基本序号(base_seqnum)加上1(s[0]、s[l]
→
base_seqnum+1)。因此,可以将交叉口处的两个车辆的序号设置为“1”,并且可以使两个车辆(同时)启动。之后,流程继续进行结束步骤并且getseqnums:2_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第二活动步骤,并且两个车辆的序号被分配以加上每个车辆的相应的停止号的相应的基本序号(base_seqnum)。停止号根据stoplist中的位置指示相应车辆的排名,其按每个车辆各自的停止时间来排序。因此,在时间上第一个停下来的车辆的序号可以被设置为“1”,并且该车辆可能是第一个获得启动许可的。另外的车辆的序号可以被设置为“2”,并且必须等待第一车辆的启动。最后,流程也继续进行结束步骤并且getseqnums:2_vehicles处理被终止。
[0138]
图25a和图25b提供了关于上述getseqnums:3_vehicles处理的附加的详细信息。getseqnums:3_vehicles处理用流程图来说明。根据图25a,流程以开始步骤开始,接着是第一决策步骤以验证所有三个车辆s[0]、s[1]和s[2]是否都在右转。如果是,则流程继续进行第一活动步骤,并且所有三个车辆的序号都分配以相应的基本序号加上“1”(s[0]、s[l]、s[2]
→
base_seqnum+1)。之后,流程继续进行结束步骤并且getseqnums:3_vehicles处理被终止。
[0139]
如果否,则流程继续进行第二决策步骤,并且根据比较处理比较相对于车辆s[0]和s[l]的实际位置的预期方向,如前所述。如果比较处理返回“y”,则流程继续进行第二活动步骤,并且车辆s[0]和s[l]的序号分配以相应的基本序号加上“1”(s[0]、s[l]
→
base_seqnum+1),并且车辆s[2]的序号分配以相应的基本序号加上“2”(s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:3_vehicles处理被终止。
[0140]
如果比较处理返回“n”,则流程继续进行第三决策步骤,并且根据比较处理比较相对于车辆s[0]和s[2]的实际位置的预期方向,如前所述。如果比较处理返回“y”,则流程继续进行第三活动步骤,并且车辆s[0]和s[2]的序号分配以相应的基本序号加上“1”(s[0]、s[2]
→
base_seqnum+1),并且车辆s[1]的序号分配以相应的基本序号加上“2”(s[1]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:3_vehicles处理被终止。
[0141]
根据图25b,如果比较处理返回“n”,则流程继续进行第四决策步骤,并且根据比较
处理比较相对于车辆s[1]和s[2]的实际位置的预期方向,如前所述。如果比较处理返回“y”,则流程继续进行第四活动步骤,并且车辆s[1]和s[2]的序号分配以相应的基本序号加上“1”(s[1]、s[2]
→
base_seqnum+1),并且车辆s[0]的序号分配以相应的基本序号加上“2”(s[0]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:3_vehicles处理被终止。
[0142]
如果比较处理返回“n”,则流程继续进行第五活动步骤,并且所有三个车辆的序号被分配以相应的基本序号(base_seqnum)加上每个车辆的相应的停止号。最后,流程继续进行结束步骤并且getseqnums:3_vehicles处理被终止。
[0143]
图26a至图26c提供了关于上述getseqnums:3_vehicles处理的附加的详细信息。getseqnums:3_vehicles处理用流程图来说明。根据图26a,流程以开始步骤开始,接着是第一决策步骤以验证所有四个车辆(s[0]、s[1]、s[2]、s[3])是否都在右转。如果是,则流程继续进行第一活动步骤,并且所有三个车辆的序号都分配以相应的基本序号加上“1”(s[0]、s[l]、s[2]、s[3]
→
base_seqnum+1)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0144]
如果否,则流程继续进行第二决策步骤以验证车辆s[0]、s[l]和s[2]是否正在右转。如果是,则流程继续进行第二活动步骤,并且这些车辆的序号都分配以相应的基本序号加上“1”(s[0]、s[l]、s[2]
→
base_seqnum+1)。此外,车辆s[3]的序号分配以相应的基本序号加上“2”(s[3]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0145]
如果否,则流程继续进行第三决策步骤以验证车辆s[0]、s[l]和s[3]是否正在右转。如果是,则流程继续进行第三活动步骤,并且这些车辆的序号都分配以相应的基本序号加上“1”(s[0]、s[l]、s[3]
→
base_seqnum+1)。此外,车辆s[2]的序号分配以相应的基本序号加上“2”(s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0146]
如果否,则流程继续进行第三决策步骤以验证车辆s[0]、s[l]和s[3]是否正在右转。如果是,则流程继续进行第三活动步骤,并且这些车辆的序号都分配以相应的基本序号加上“1”(s[0]、s[l]、s[3]
→
base_seqnum+1)。此外,车辆s[2]的序号分配以相应的基本序号加上“2”(s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0147]
如果否,则流程继续进行第四决策步骤以验证车辆s[0]、s[2]和s[3]是否正在右转。如果是,则流程继续进行第四活动步骤,并且这些车辆的序号都分配以相应的基本序号加上“1”(s[0]、s[2]、s[3]
→
base_seqnum+1)。此外,车辆s[1]的序号分配以相应的基本序号加上“2”(s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0148]
如果否,则流程继续进行第五决策步骤(参见图26b)以验证车辆s[1]、s[2]和s[3]是否正在右转。如果是,则流程继续进行第五活动步骤,并且这些车辆的序号都分配以相应的基本序号加上“1”(s[1]、s[2]、s[3]
→
base_seqnum+1)。此外,车辆s[0]的序号分配以相应的基本序号加上“2”(s[0]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0149]
如果否,则流程继续进行第六决策步骤,并且根据比较处理比较相对于车辆s[0]和s[l]的实际位置的预期方向,如前所述。如果比较处理返回“y”,则流程继续进行第六活动步骤,并且车辆s[0]和s[l]的序号都分配以相应的基本序号加上“1”(s[0]、s[l]
→
base_seqnum+1)。然后,流程继续进行第七决策步骤,并且根据比较处理比较相对于车辆s[2]和s[3]的实际位置的预期方向。如果比较处理返回“y”,则流程继续进行第七活动步骤,并且车辆s[2]和s[3]的序号都分配以相应的基本序号加上“2”(s[2]、s[3]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第八活动步骤,并且车辆s[2]的序号分配以相应的基本序号加上“2”(s[2]
→
base_seqnum+2),而车辆s[3]的序号分配以相应的基本序号加上“3”(s[3]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0150]
然而,如果根据第六决策步骤的比较处理返回“n”,则流程继续进行第八决策步骤,并且根据比较处理比较相对于车辆s[0]和s[2]的实际位置的预期方向。如果比较处理返回“y”,则流程继续进行第九活动步骤,并且车辆s[0]和s[2]的序号都分配以相应的基本序号加上“1”(s[0]、s[2]
→
base_seqnum+1)。然后,流程继续进行第九决策步骤,并且根据比较处理比较相对于车辆s[1]和s[3]的实际位置的预期方向。如果比较过程返回“y”,则流程继续进行第十活动步骤,并且车辆s[1]和s[3]的序号都分配以相应的基本序号加上“2”(s[1]、s[3]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第十一活动步骤,并且车辆s[1]的序号分配以相应的基本序号加上“2”(s[1]
→
base_seqnum+2),而车辆s[3]的序号分配以相应的基本序号加上“3”(s[3]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0151]
然而,如果根据第八决策步骤的比较处理返回“n”,则流程继续进行第十决策步骤(参见图26c),并且根据比较处理比较相对于车辆s[0]和s[3]的实际位置的预期方向。如果比较处理返回“y”,则流程继续进行第十二活动步骤,并且车辆s[0]和s[3]的序号都分配以相应的基本序号加上“1”(s[0]、s[3]
→
base_seqnum+1)。然后,流程继续进行第十一决策步骤,并且根据比较处理比较相对于车辆s[1]和s[2]的实际位置的预期方向。如果比较过程返回“y”,则流程继续进行第十三活动步骤,并且车辆s[1]和s[2]的序号都分配以相应的基本序号加上“2”(s[1]、s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第十四活动步骤,并且车辆s[1]的序号分配以相应的基本序号加上“2”(s[1]
→
base_seqnum+2),而车辆s[2]的序号分配以相应的基本序号加上“3”(s[2]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0152]
然而,如果根据第十决策步骤的比较处理返回“n”,则流程继续进行第十二决策步骤,并且根据比较处理比较相对于车辆s[1]和s[2]的实际位置的预期方向。如果比较过程返回“y”,则流程继续进行第十五活动步骤,并且车辆s[1]和s[2]的序号都分配以相应的基本序号加上“1”(s[1]、s[2]
→
base_seqnum+1)。然后,流程继续进行第十三决策步骤,并且根据比较处理比较相对于车辆s[0]和s[3]的实际位置的预期方向。如果比较处理返回“y”,则流程继续第十六活动步骤,并且车辆s[0]和s[3]的序号分配以相应的基本序号加上“2”(s[0]、s[3]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles
处理被终止。然而,如果比较处理返回“n”,则流程继续进行第十七活动步骤,并且车辆s[0]的序号分配以相应的基本序号加上“2”(s[0]
→
base_seqnum+2),而车辆s[3]的序号分配以相应的基本序号加上“3”(s[3]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0153]
然而,如果根据第十二决策步骤的比较处理返回“n”,则流程继续进行第十四决策步骤,并且根据比较处理比较相对于车辆s[1]和s[3]的实际位置的预期方向。如果比较过程返回“y”,则流程继续进行第十八活动步骤,并且车辆s[1]和s[3]的序号都分配以相应的基本序号加上“1”(s[1]、s[3]
→
base_seqnum+1)。然后,流程继续进行第十五决策步骤,并且根据比较处理比较相对于车辆s[0]和s[2]的实际位置的预期方向。如果比较处理返回“y”,则流程继续第十九活动步骤,并且车辆s[0]和s[2]的序号分配以相应的基本序号加上“2”(s[0]、s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第二十活动步骤,并且车辆s[0]的序号分配以相应的基本序号加上“2”(s[0]
→
base_seqnum+2),而车辆s[2]的序号分配以相应的基本序号加上“3”(s[3]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0154]
然而,如果根据第十二决策步骤的比较处理返回“n”,则流程继续进行第十四决策步骤,并且根据比较处理比较相对于车辆s[1]和s[3]的实际位置的预期方向。如果比较过程返回“y”,则流程继续进行第十八活动步骤,并且车辆s[1]和s[3]的序号都分配以相应的基本序号加上“1”(s[1]、s[3]
→
base_seqnum+1)。然后,流程继续进行第十五决策步骤,并且根据比较处理比较相对于车辆s[0]和s[2]的实际位置的预期方向。如果比较处理返回“y”,则流程继续第十九活动步骤,并且车辆s[0]和s[2]的序号分配以相应的基本序号加上“2”(s[0]、s[2]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第二十活动步骤,并且车辆s[0]的序号分配以相应的基本序号加上“2”(s[0]
→
base_seqnum+2),而车辆s[2]的序号分配以相应的基本序号加上“3”(s[3]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0155]
然而,如果根据第十四决策步骤的比较处理返回“n”,则流程继续进行第十六决策步骤,并且根据比较处理比较相对于车辆s[2]和s[3]的实际位置的预期方向。如果比较处理返回“y”,则流程继续进行第二十一活动步骤,并且车辆s[2]和s[3]的序号都分配以相应的基本序号加上“1”(s[2]、s[3]
→
base_seqnum+1)。然后,流程继续进行第十七决策步骤,并且根据比较处理比较相对于车辆s[0]和s[1]的实际位置的预期方向。如果比较处理返回“y”,则流程继续进行第二十二活动步骤,并且车辆s[0]和s[l]的序号都分配以相应的基本序号加上“2”(s[0]、s[l]
→
base_seqnum+2)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。然而,如果比较处理返回“n”,则流程继续进行第二十三活动步骤,并且车辆s[0]的序号分配以相应的基本序号加上“2”(s[0]
→
base_seqnum+2),而车辆s[1]的序号分配以相应的基本序号加上“3”(s[1]
→
base_seqnum+3)。之后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0156]
然而,如果根据第十六决策步骤的比较处理返回“n”,则流程继续第二十四活动步骤,并且车辆s[0]、s[1]、s[2]、s[3]的序号分配以相应的基本序号(base_seqnum)加上每个
车辆的相应的停止号。最后,流程继续进行结束步骤并且getseqnums:4_vehicles处理被终止。
[0157]
图27说明了如前所述的相应的运输车辆内的交叉口导航分析模块2700的可能的布置。
[0158]
附录a
[0159][0160]
附录b
[0161]
s_vehicledata m_egodata
[0162]
●
timestape[s]
[0163]
●
position
[0164]
■
latitude[deg]
[0165]
■
longitude[deg]
[0166]
■
heading[deg]
[0167]
●
velocity
[0168]
■
longitudinal speed[m/s]
[0169]
■
lateral speed[m/s]
[0170]
●
acceleration
[0171]
■
longitudinal accel[m/ss]
[0172]
■
lateral accel[m/ss]
[0173]
●
light_status
[0174]
■
turn_signal_bitmask
[0175]
■
brake_light[bool]
[0176]
●
map_matching
[0177]
■
matched_lane_id
[0178]
■
dist_stop_location[m]
[0179]
■
target_lane_id
[0180]
●
mwsdata
[0181]
■
eta
[0182]
■
stoptime
[0183]
■
sequencenumber
[0184]
■
sequencenumber_verified
[0185]
■
inconflictzone?
[0186]
m_approachlist
[0187]
●
s_vehicledata m_approachlist[4]
[0188]
m_stoplist<<sorted>>
[0189]
●
s_vehicledata m_stoplist[4]
[0190]
m_inconflictzone
[0191]
●
s_vehicledata m_inconflictzone[4]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1