一种车辆自动换道中的偏移控制方法、装置及汽车与流程
1.本发明涉及汽车辅助驾驶领域,具体涉及一种车辆自动换道中的偏移控制方法、装置及汽车。
背景技术:
2.在智能驾驶技术中,巡航功能为智能驾驶重要的功能之一,其主要依靠毫米波雷达传感器、智能摄像头、或者两者融合的方式探测周围的路况信息。自适应巡航是一个允许车辆巡航控制系统通过调整速度以适应交通状况的智能驾驶功能。自适应巡航系统由先进传感器、数字信号处理器以及控制单元三部分构成。传感器负责感知本车确切位置以及前车的相对位置。安装在车辆前方的毫米波雷达用于检测本车车道及相邻车道上车辆的行进状态。若前方车辆速度比本车车速慢,自适应巡航系统会降低车速并调整与前方车辆的时距范围,如有换道请求,车辆会根据传感器获取的路况信息自主选择换道时机,实现驾驶员驾驶换道意图。
3.随着辅助驾驶功能舒适度、可靠性、性能需求提升,智能驾驶功能在复杂路况下面临的挑战越来越大。交叉路口、护栏、行人、各种车辆等对换道时机及换道实际需求路径提出更高要求。如仅根据本车道及相邻车道前后车辆的相关信息选择换道,未考虑目标换道区域的相邻车道的路况信息,如遇换道后相邻车道存在潜在危险,若长时间并行,不利于行车安全。
技术实现要素:
4.本发明实施例提供了一种车辆自动换道中的偏移控制方法、装置及汽车,其用于解决车辆准备进入自动换道过程却出现可能会影响车辆安全换道的干扰物时如何保障车辆的安全换道。
5.为了解决上述问题,本发明具体是以如下技术方案实现的:本发明实施例提供了一种车辆自动换道中的偏移控制方法,包括:在排除不存在一定会影响本车安全换道的危险物后,确定是否存在可能会影响本车安全换道的干扰物;若不存在,则控制本车按照理论换道路线进行自动换道;若存在,则重新确定一条行驶中心线,并重新规划出一条使本车最终保持所述行驶中心线行驶为新的目标的偏移换道路线;控制车辆按照所述偏移换道路线进行自动换道;所述理论换道路线是指以使本车最终保持目标车道的车道中心线行驶为目标所预先规划的换道路线;所述干扰物位于本车的前方特定区域内。
6.其中,若目标车道远离本车的一侧不具有相邻行道,则可能影响本车安全换道的干扰物包括:在目标车道内移动且在横向上位于远离本车的一侧的第一类型干扰物,且所述第
一类型干扰物与目标车道线之间的最短横向距离位于第一预设距离范围内;所述目标车道线为当前车道和目标车道之间的车道线;或在目标车道远离本车的一侧静止的第二类型干扰物,且所述第二类型干扰物与所述目标车道线之间的横向距离位于第二预设距离范围内;所述第一预设距离范围的最大值小于所述第二预设距离范围的最小值。
7.其中,若目标车道远离本车的一侧具有相邻机动车道,则可能影响本车安全换道的干扰物包括:在目标车道的相邻机动车道内移动的第三类型干扰物;所述第三类型干扰物与目标车道线之间的最短横向距离位于第三预设距离范围内;若目标车道远离本车的一侧具有相邻非机动车道,则可能影响本车安全换道的干扰物包括:在目标车辆的相邻非机动车道内移动的第四类型干扰物,所述第四类型干扰物与目标车辆线之间的最短横向距离位于第四预设距离范围内;或在目标车辆的相邻非机动车道内移动的第四类型干扰物和在当前车道内移动且位于本车前方的第五类型干扰物,且所述第四类型干扰物与所述第五类型干扰物之间的最短横向距离位于第五预设距离范围内;所述目标车道线为当前车道和目标车道之间的车道线。
8.其中,所述第一类型干扰物为在目标车道内移动的行人或骑行者,若存在所述第一类型干扰物,重新确定一条行驶中心线,以及重新规划偏移换道路线的步骤具体为:将目标车道的车道中心线朝向靠近本车的一侧方向偏移第一距离,得到所述行驶中心线;第一距离为设定距离;基于所述行驶中心线,重新规划使本车从当前位置变换到保持所述行驶中心线行驶的偏移换道路线。
9.其中,第二类型干扰物为在目标车道外的护栏,若存在所述第二类型干扰物,重新确定一条行驶中心线,以及重新规划偏移换道路线的步骤具体为:将目标车道的车道中心线朝向靠近本车的一侧方向偏移第二距离,得到所述行驶中心线;第二距离为设定距离;基于所述行驶中心线,重新规划使本车从当前位置变换到保持所述行驶中心线行驶的偏移换道路线,以对本车进行保护。
10.其中,第三类型干扰物为在目标车道的相邻机动车道内移动的大型车辆,若存在所述第三类型干扰物,重新确定一条行驶中心线,以及重新规划偏移换道路线的步骤具体为:将目标车道的车道中心线朝向靠近本车的一侧方向偏移第三距离,得到所述行驶中心线;通过所述第三类型干扰物与目标车道内靠近所述第三类型干扰物的车道线之间的距离确定所述第三距离;基于所述行驶中心线,重新规划使本车从当前位置变换到保持所述行驶中心线行驶的偏移换道路线,以对本车进行保护。
11.其中,所述第四类型干扰物为在目标车辆的相邻非机动车道内移动的行人或骑行者,若存在所述第四类型干扰物,重新确定一条行驶中心线,以及重新规划偏移换道路线的
步骤具体为:将目标车道的车道中心线朝向靠近本车的一侧方向偏移第四距离,得到所述行驶中心线;所述第四距离与所述第四类型干扰物与目标车道的车道线之间的距离相关;通过所述第四类型干扰物与目标车道内靠近所述第四类型干扰物的车道线之间的距离确定所述第四距离;基于所述行驶中心线,重新规划使本车从当前位置变换到保持所述行驶中心线行驶的偏移换道路线。
12.其中,所述第四类型干扰物为在目标车辆的相邻非机动车道内移动的行人或骑行者,所述第五类型干扰物为在当前车道内移动且位于本车前方的大型车辆;若存在所述第四类型干扰物和第五类型干扰物,重新确定一条行驶中心线,以及重新规划偏移换道路线的步骤具体为:将目标车道的车道中心线朝向远离行人的一侧方向偏移第五距离,得到所述行驶中心线;通过第四类型干扰物与目标车道的车道中心线之间的距离和第五类型干扰物与目标车道的车道中心线之间的距离,确定所述第五距离;且所述第四类型干扰物与目标车道的车道中心线之间的距离越小,第五距离越大;基于所述行驶中心线,重新规划使本车从当前位置变换到保持所述行驶中心线行驶的偏移换道路线。
13.本发明实施例还提供了一种车辆自动换道中的偏移控制装置,包括:确定单元,用于在排除不存在一定会影响本车安全换道的危险物后,控制本车按照理论换道路线进行自动换道,确定是否存在可能会影响本车安全换道的干扰物;第一控制单元,用于若不存在,则控制本车按照理论换道路线进行自动换道;规划单元,用于若存在,则重新确定一条行驶中心线,并重新规划出一条使本车最终保持所述行驶中心线行驶为新的目标的偏移换道路线;第二控制单元,用于控制车辆按照所述偏移换道路线进行自动换道;所述理论换道路线是指以使本车最终保持目标车道的车道中心线行驶为目标所预先规划的换道路线;所述干扰物位于本车的前方特定区域内。
14.本发明实施例还提供了一种汽车,包括上述的车辆自动换道中的偏移控制装置。
15.本发明的技术效果为:在车辆准备自动变换到目标车道时,若存在车辆、行人、护栏等可能会干扰本车安全换道的情况,通过基于实际情况选择新的换道中心线,来合理的重新规划偏移换道路线,确保车辆自动换道过程中远离存在危险的干扰物,降低安全风险。
附图说明
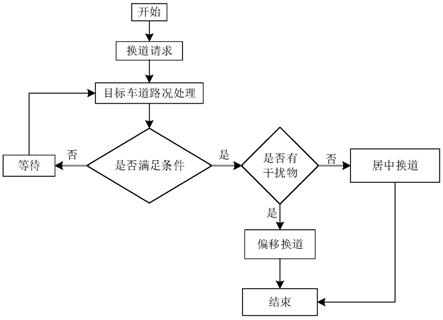
16.图1为自动换道过程中的偏移控制方法的流程示意图;图2 自动换道过程中的偏移控制逻辑判断示意图;图3 自动换道过程中的偏移控制场景示意图(车辆);图4 自动换道过程中的偏移控制场景示意图(护栏);图5 自动换道过程中的偏移控制场景示意图(骑行者/行人);图6 自动换道过程中的偏移控制场景示意图(交叉);图7 自动换道过程中的智慧偏移控制场景示意图(双车道)。
具体实施方式
17.下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
18.本发明实施例提供了一种车辆自动换道的偏移控制系统,其包括:路况信息传感单元、路况信息处理单元、转向控制单元和加速度控制单元。
19.其中,路况信息传感单元用于对车辆周边的实时路况信息进行采集,例如,对本车道内、目标车道内、目标车道的相邻行道(相邻行道为机动车道或非机动车道)内的行人、骑行者、小型轿车、大型车辆,护栏,静止障碍物等实时路况信息进行采集。
20.路口信息处理单元基于路况信息传感单元所提供的实时路况信息,判断当前是否存在可能影响处于自动换道过程中的本车安全换道的干扰物,若存在,则需要基于预设逻辑,重新规划出一条能够使车辆安全换道的偏移换道路线。然后,基于该偏移换道路线,转向控制单元和加速度控制单元对应对车辆进行横纵向控制。其中,转向控制单元和加速度控制单元按照规划好的路线进行车辆的横纵向控制逻辑为本领域所公知的技术。
21.此外,本方案中,自动驾驶车辆在规划行车路径时,优先为使本车保持车道中心线行驶进行行驶路径规划。也就是说,车辆要进行自动换道时,车辆在自动换道前,应当保持本车道的车道中心线行驶;车辆在自动换道之后,应当保持已经换道后的目标车辆的车道中心线行驶,车辆需要按照现有技术的相关控制逻辑规划出一条使本车保持目标车道的车道中心线行驶为目标的理论换道路线。本实施例中,对于车辆的行驶路径规划和理论换道路径的规划都为现有技术。
22.同时,基于现有技术,车辆要想能够进行自动换道,必须要确定车辆换道过程中不存在确定会影响车辆安全换道的危险物(通过当前条件是否满足与路况中的危险物之间的碰撞时间ttc大于3秒(该时间的数值可以根据实际情况进行标定),大于或等于3s则确定不存在危险物,小于3s则确定存在危险物)。然后,在此基础上,车辆才有机会进入自动换道过程。
23.基于本车所处的实际道路环境,可能为一车道、两车道、三车道甚至多车道,其中本车当前所处的实际道路环境为一车道的情况不属于本发明实施例中的换道场景。
24.基于本车当前所处车道的不同,可能会影响车辆安全换道的干扰物也存在多种情况。其中,在本车所处的实际道路环境中存在两个车道,此时,本车可能位于左侧车道,也可以位于右侧车道。本车所处的实际道路环境存在三车道时,车辆可能位于外侧的两个车道,也可能位于中间车道。本车所处的实际道路环境存在四车道及以上时,车辆可能位于外侧的两个车道,也可能位于中间的任意一个车道。
25.如图1所示,各功能单元描述如下:传感器、路况处理单元、转向控制单元、加速度控制单元;二、本发明的自动换道智慧偏移控制逻辑判断示意图如图2所示,具体步骤如下:1、本车d档行驶,车辆接收到换道请求,道路处理单元判断当前条件是否满足与路况中的危险物之间的碰撞时间ttc大于3秒(该时间的数值可以根据实际情况进行标定),满足则响应换道请求,即控制本车按照理论换道路线进行自动换道,不满足条件则继续等待。
26.2、若满足换道条件,需要进一步判定切换目标车道及其相邻行道(机动车道或非机动车道)是否存在车辆、护栏等可能会影响本车安全的干扰物,或行人、骑行者等易于受伤害的干扰物,如无干扰因素则保持居中换道(即控制本车按照理论换道路线进行自动换道,所述理论换道路线是指以使本车最终保持目标车道的车道中心线行驶为目标所预先规划的换道路线);如存在干扰物则需要进行偏移换道路线重新规划。
27.本实施例中,所存在的干扰物可能有多种方式。例如,如图3所示,该方案中的干扰物为在目标车道的相邻车道(非机动车道)内存在大型车辆(该大型车辆为上述的第三类型干扰物)。大型车辆是指:总质量 4.5t (含)、乘坐人数(驾驶员除外) 20 人(含)或车长 6 m (含)以上的汽车。
28.具体来说,本车a行驶于左车道1,如本车a需要自动换道至中车道2(目标车道),此刻右车道3(目标车道的相邻车道)存在大型车辆b在目标车道的相邻车道内靠近目标车道一侧的车道线行驶,并且该大型车辆b和目标车道线之间的最短横向距离(该实施例中,最短横向距离即该大型车辆b的左侧和车道2的左侧车道线之间的最短横向距离)位于第三预设距离范围内,该第三预设距离范围可以基于实际道路类型确定,第三预设距离范围的最小值为该目标车道的宽度,最大值为设定值,第三预设距离范围的设置目的是用于排除目标车道的相邻车道内完全不可能影响本车安全换道的大型车辆。该大型车辆b位于本车的前方特定区域内,该特定区域是指干扰物在纵向方向上的位置位于本车的当前位置和理论换道路线的终点位置之间构成的特定区域。
29.则本车a的传感器会探知到环境路况信息,路况处理单元需要基于探测到的路况信息来确定一条新的换道中心线。如图3所示,大型车辆b距离离其左侧的车道线边缘20cm~30cm范围(可标定),则本车a的路况处理单元根据预设的加权系数0.4(可标定)进行加权算法运算,即需要将目标车道2的车道中心线4朝向远离该大型车辆b的方向偏移25(20cm~30cm)*0.4(加权系数)cm(即所需偏移的第三距离的值为10cm),偏移后的车道中心线4作为新的换道中心线。若大型车辆b距离离其左侧的车道线边缘10cm~20cm范围,则本车a的路况处理单元根据加权系数1.0(可标定)进行加权算法运算,即需要将目标车道2的车道中心线4朝向远离该大型车辆b的方向偏移15*1.0cm(即所需偏移的第三距离的值为15cm),偏移后的车道中心线4作为新的换道中心线。若大型车辆b距离离其左侧的车道线边缘0cm~10cm范围,则本车a的路况处理单元根据加权系数5(可标定)进行加权算法运算,即需要将目标车道2的车道中心线4朝向远离该大型车辆b的方向偏移5*5.0cm(即所需偏移的第三距离的值为25cm)。
30.在通过上述这些方式确定出新的换道中心线之后,按照现有的理论换道路线规划原理,重新规划一条使本车以保持换道中心线行驶为最终目标的偏移换道路线。车辆在按照新的偏移换道路线行驶时,可以避免与潜在干扰物车辆b距离过近、并行时间过长。
31.再例如,如图4所示,本车a行驶于中车道2,如本车a需要自动换道至右车道3,此刻右车道3的右侧为护栏6,该护栏6与目标车道线之间的横向距离位于第二预设距离范围内,该第二预设距离范围可以基于实际道路类型确定,第二预设距离范围的最小值为该目标车道的宽度,最大值为设定值。如图4所示,车辆a需要换道至目标车道3,目标车道3右侧为护栏,则本车a的路况处理单元根据软件对护栏6的属性定义,则直接将目标车道3的车道中心线4朝远离护栏的一侧方向偏移第二距离,该第二距离为设定距离,例如为15cm(可标定),
偏移后的车道中心线4作为新的换道中心线。
32.在通过上述方式确定出新的换道中心线之后,按照现有的理论换道路线规划原理,重新规划一条使本车以保持换道中心线行驶为最终目标的偏移换道路线。车辆在按照新的偏移换道路线行驶时,可以避免与潜在的干扰物护栏6距离过近、并行时间过长。
33.再例如,如图5所示,本车a行驶于中车道2,如本车a需要自动换道至右车道3,此刻右车道3的右侧为非机动车道7,且非机动车道7存在骑行者c(也可以为行人),并且该骑行者c与目标车道线之间的最短横向距离位于第四预设距离范围内。如图5所示,骑行者c距离其左侧的车道线边缘20cm~30cm范围(可标定),则本车a的路况处理单元根据预设的加权系数0.6(可标定)进行加权算法运算,即需要将目标车道2的车道中心线4朝向远离该骑行者c的方向偏移25*0.6cm(即所需偏移的第四距离的值为15cm),偏移后的车道中心线4作为新的换道中心线。若骑行者c距离其左侧的车道线边缘10cm~20cm范围,则本车a的路况处理单元根据预设的加权系数1.5(可标定)进行加权算法运算,即需要将目标车道2的车道中心线4朝向远离该骑行者c的方向偏移15*1.5cm(即所需偏移的第四距离的值为22.5cm),偏移后的车道中心线4作为新的换道中心线。若骑行者c距离其左侧的车道线边缘0cm~10cm范围,则本车a的路况处理单元根据预设的加权系数7(可标定)进行加权算法运算,即需要将目标车道2的车道中心线4朝向远离该骑行者c的方向偏移5*7.0cm(即所需偏移的第四距离的值为35cm),偏移后的车道中心线4作为新的换道中心线。
34.在通过上述方式确定出新的换道中心线之后,按照现有的理论换道路线规划原理,重新规划一条使本车以保持换道中心线行驶为最终目标的偏移换道路线。车辆在按照新的偏移换道路线行驶时,可以避免与潜在干扰物骑行人员c距离过近、并行时间过长。
35.再例如,如图6所示,本车a行驶于中车道2,如本车a需要自动换道至右车道3,此刻车道2内位于本车a的前方存在大型车辆b,非机动车道7内存在潜在危险骑行者c,若大型车辆b和骑行者c之间的最小横向距离位于第五预设距离范围内,则确定该大型车辆b为第五类型干扰物,该骑行者c为第四类型干扰物。本实施例中,可以通过预先标定第四类型干扰物与目标车道的车道中心线之间的距离、第五类型干扰物与目标车道的车道中心线之间的距离和第五距离之间的预定关系,通过第四类型干扰物与目标车道的车道中心线之间的距离和第五类型干扰物与目标车道的车道中心线之间的距离,确定所述第五距离;并且,所述第四类型干扰物与目标车道的车道中心线之间的距离越小,第五距离越大。例如如图5所示,若本车a换至目标车道3后距离两侧危险源大于100cm以上,则保持两目标距离宽度理论中线换道;若骑行者c和大型车辆b各自距离该目标车道的车道中心线之间的距离位于90cm~100cm,需要将目标车道2的车道中心线4朝向远离该骑行者c的方向偏移15cm(可标定)(即所需偏移的第五距离的值为15cm),偏移后的车道中心线4作为新的换道中心线;若骑行者c和大型车辆b各自距离该目标车道的车道中心线之间的距离位于80cm~90cm,需要将目标车道2的车道中心线4朝向远离该骑行者c的方向偏移10cm(可标定)换道(即所需偏移的第五距离的值为10cm),偏移后的车道中心线4作为新的换道中心线;若骑行者c和大型车辆b各自距离该目标车道的车道中心线之间的距离位于70cm~80cm,需要将目标车道2的车道中心线4朝向远离该骑行者c的方向偏移5cm(可标定)换道(即所需偏移的第五距离的值为5cm),偏移后的车道中心线4作为新的换道中心线。
36.在通过上述方式确定出新的换道中心线之后,按照现有的理论换道路线规划原
理,重新规划一条使本车以保持换道中心线行驶为最终目标的偏移换道路线。车辆在按照新的偏移换道路线行驶时,可以避免与潜在骑行者c及大型车辆b任何一方距离过近、并行时间过长。
37.再例如,如图7所示,本车a行驶于位于左侧的车道1内,如本车a需要自动换道至右侧的车道2内(即此时的车道2为目标车道),此刻车道2内存在骑行者c,若骑行者c与车道2的左侧车道线之间宽度位于第一预设距离范围内,则需进行偏移控制。具体地,在进行智慧偏移控制时,需要将目标车道的车道中心线向靠近本车的一侧方向偏移第一距离(设定距离),偏移后的车道中心线确定为换道中心线。
38.在通过上述方式确定出新的换道中心线之后,按照现有的理论换道路线规划原理,重新规划一条使本车以保持换道中心线行驶为最终目标的偏移换道路线。车辆在按照新的偏移换道路线行驶时,可以避免与潜在骑行者c及大型车辆b任何一方距离过近、并行时间过长本发明实施例还提供了一种车辆自动换道中的偏移控制装置,包括:确定单元,用于在排除不存在一定会影响本车安全换道的危险物后,确定是否存在可能会影响本车安全换道的干扰物;第一控制单元,用于若不存在,则控制本车按照理论换道路线进行自动换道;规划单元,用于若存在,则重新确定一条行驶中心线,并重新规划出一条使本车最终保持所述行驶中心线行驶为新的目标的偏移换道路线;第二控制单元,用于控制车辆按照所述偏移换道路线进行自动换道;所述理论换道路线是指以使本车最终保持目标车道的车道中心线行驶为目标所预先规划的换道路线;所述干扰物位于本车的前方特定区域内。
39.本发明实施例还提供了一种汽车,包括上述的车辆自动换道中的偏移控制装置。
40.上述实施例只对其中一些本发明的一个或多个实施例进行了描述,但是本领域普通技术人员应当了解,本发明可以在不偏离其主旨与范围内以许多其他的形式实施。因此,所展示的例子与实施方式被视为示意性的而非限制性的,在不脱离如所附各权利要求所定义的本发明精神及范围的情况下,本发明可能涵盖各种的修改与替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1