基于智能车载终端的交通事故检测和报警方法与流程
1.本发明设计车辆交通事故预警技术领域,尤其涉及一种通过智能车辆的车载终端对交通事故进行检测与报警的方法。
背景技术:
2.随着社会经济的发展,车辆保有量越来越大,路况也日趋复杂,车辆发生交通事故的可能性显著增大。如何及时发现、定位和处理交通事故,对拯救生命,快速恢复道路通行有着积极作用。尤其当交通事故发生在人烟稀少的地方,或者出现事故逃逸的违法行为时,能够及时、准确识别交通事故并及时报警对拯救伤者、还原交通事故过程显得更加重要。现阶段,当车辆发生交通事故后,往往需要交通参与者人工操作才能进行报警,时效性较低,尤其当发生较严重交通事故,或者在人烟稀少的地方,以及事故后发生逃逸等违法行为时,都存在难以及时、准确地对事故进行定位的问题,不利于拯救伤者、还原交通事故发生的过程,从而造成更大的损失。因此,如何在交通事故尚未发生之前对车辆行驶状态进行必要的监控,实现对事故的及时判断和预报,是本领域中亟待解决的技术问题。
技术实现要素:
3.有鉴于此,本发明旨在解决上述现有技术中存在的技术问题,提供了一种基于智能车载终端的交通事故检测和报警方法,主要包括以下步骤:
4.步骤一、基于智能车载终端获取包含发动机转速和车速的整车数据、定位数据、加速度数据以及姿态数据,基于这些数据判断车辆当前的行驶状态;
5.步骤二、根据获取的加速度值及相应的持续时间,确定车辆是否发生碰撞情况,并根据所述加速度值与持续时间,确定碰撞情况等级;
6.步骤三、根据获取的姿态数据确定车辆的俯仰角、翻滚角的变化幅度以及航向角变化率,确定车辆是否发生倾翻情况,并根据所述俯仰角、翻滚角的变化幅度与航向角变化率,确定倾翻情况等级;
7.步骤四、在车辆发生所述碰撞或倾翻情况后,根据车辆姿态数据、车速以及定位数据判断车辆是否处于静止状态,以及处于静止状态的持续时间;
8.步骤五、综合所述碰撞情况等级、倾翻情况等级以及是否处于静止状态,确定最终的事故等级。
9.进一步地,所述步骤二中具体基于加速度值在小于预定值的持续时间内发生跳变的情况下,确定车辆发生碰撞情况;所述碰撞情况等级通过对加速度值和加速度变化率分别与相应阈值进行比较来确定。
10.进一步地,所述步骤三中具体通过对俯仰角和翻滚角与相应的阈值分别进行比较确定是否发生倾翻情况;所述倾翻情况等级通过对俯仰角、翻滚角的变化幅度以及航向角变化率分别与相应阈值进行比较来确定。
11.进一步地,在确定最终的事故等级后,智能车载终端针对不同事故等级执行相应
的延时后将事故等级、定位数据等报警信息及时上报;所执行的延时包括:
12.(1).车辆在静止状态时发生事故,根据倾翻情况等级以及车辆定位变化分别执行:
①
.不提供延时;
②
.提供短延时;
③
.提供长延时;
13.(2).车辆在行驶状态时发生事故,根据碰撞情况等级和/或倾翻情况等级和/或事故后的车速和/或车辆定位变化分别执行:
①
.不提供延时;
②
.提供短延时;
③
.提供长延时。
14.进一步地,在所述延时范围内,驾驶员能够取消将报警信息上报。
15.上述本发明所提供的方法,通过智能车载终端识别交通事故并上传事故发生的时间、地点和类型,使得交通拯救更加快速有效。智能车载终端能够利用内置的高精度加速度计和陀螺仪经计算和修正得出车辆当前的姿态和行驶状态,并以此来判断车辆是否发生了交通事故以及事故的等级,记录交通事故发生的时间和位置并经过延时后报警和上报平台,为及时处理交通事故,拯救伤者具有积极作用。此外,报警延时内加入手动取消报警的功能可以有效避免智能车载终端误报的可能性,提高交通事故上报的可靠性。
附图说明
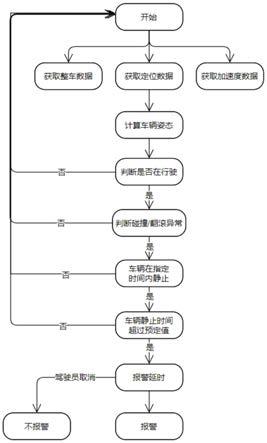
16.图1为本发明所提供方法的总体流程示意图。
具体实施方式
17.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.本发明所提供的基于智能车载终端的交通事故检测和报警方法,如图1所示,主要包括以下步骤:
19.步骤一、基于智能车载终端获取包含发动机转速和车速的整车数据、定位数据、加速度数据以及姿态数据,基于这些数据判断车辆当前的行驶状态;
20.步骤二、根据获取的加速度值及相应的持续时间,确定车辆是否发生碰撞情况,并根据所述加速度值与持续时间,确定碰撞情况等级;
21.步骤三、根据获取的姿态数据确定车辆的俯仰角、翻滚角的变化幅度以及航向角变化率,确定车辆是否发生倾翻情况,并根据所述俯仰角、翻滚角的变化幅度与航向角变化率,确定倾翻情况等级;
22.步骤四、在车辆发生所述碰撞或倾翻情况后,根据车辆姿态数据、车速以及定位数据判断车辆是否处于静止状态,以及处于静止状态的持续时间;
23.步骤五、综合所述碰撞情况等级、倾翻情况等级以及是否处于静止状态,确定最终的事故等级。
24.在车辆正常运行时,其加速度为一个较稳定值。当发生碰撞时,其加速度会产生较大幅度的跳变,持续时间也比较短。因此,当检测到加速度值和持续时间超过预设值时,智能车载终端认为车辆在行驶中可能发生了碰撞情况。基于这种考虑,在本发明的一个优选实施方式中,所述步骤二中具体基于加速度值在小于预定值的持续时间内发生跳变的情况下,确定车辆发生碰撞情况;所述碰撞情况等级通过对加速度值和加速度变化率分别与相
应阈值进行比较来确定。
25.在车辆正常运行时,车辆的俯仰角、航向角和翻滚角处于一个比较平稳的状态,且俯仰角和翻滚角处于合理范围。当俯仰角和翻滚角超过合理范围,或者航向角变化速率超过正常范围,智能车载终端认为车辆在行驶中可能发生了翻滚情况。由此在本发明的一个优选实施方式中,所述步骤三中具体通过对俯仰角和翻滚角与相应的阈值分别进行比较确定是否发生倾翻情况;所述倾翻情况等级通过对俯仰角、翻滚角的变化幅度以及航向角变化率分别与相应阈值进行比较来确定。
26.在本发明的一个优选实施方式中,在确定最终的事故等级后,智能车载终端针对不同事故等级执行相应的延时后将事故等级、定位数据等报警信息及时上报。由于事故严重程度不同所需要的的后续报警及处理措施也随之不同,因此可以根据不同的情况采取必要的报警或处理方式,避免对驾驶员以及警力资源的过渡占有。可执行的延时包括:
27.(1).车辆在静止状态时发生事故,常见于等待红绿灯、堵车、临时或者长期停靠等情况,这些情况下发生事故除非出现倾翻或者事故后发生较大位移的情况,其他情况下往往并不严重,为此可以在事故较轻微的情况下保证驾驶员有足够的延时时间决定是否上报报警信息。即使车辆停靠时驾驶员远离车辆,在经过一定的延时时间后也能使报警信息正常上报,从而不影响对事故的处理。基于这种考虑,根据倾翻情况等级以及车辆定位变化分别执行:
①
.不提供延时;
②
.提供短延时;
③
.提供长延时;
28.(2).车辆在行驶状态时发生事故,相对于静止状态下的事故相对更为严重。因此可以根据碰撞情况等级和/或倾翻情况等级和/或事故后的车速和/或车辆定位变化等综合考虑,从而分别执行:
①
.不提供延时;
②
.提供短延时;
③
.提供长延时。在某些车辆倾覆的状态下,即使通过轮速传感器无法获取准确的车速数据,结合定位状态仍可对事故后的车辆移动进行判断,从而确定出相应的事故等级。
29.基于本发明使驾驶员在延时时间范围内判断是否将报警信息上报,避免了在某些只需要简易处理的情况下对驾驶员以及警力资源的浪费。
30.应理解,本发明实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
31.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1