用于对工程机械的行驶方向上的障碍物进行报警的方法与流程
本公开涉及工程机械和控制,具体而言,涉及一种用于对工程机械的行驶方向上的障碍物进行报警的方法。
背景技术:
1、随着科技的进步,工程机械(例如,挖掘机)已经成为生产和建设中不可或缺的,广泛的应用于矿山、路桥、市政等领域。工程机械的工作环境复杂,工程机械周边(尤其是后方)的障碍物(例如壕沟、土堆)不仅使得存在工作过程中工程机械滑落、倾翻、碰撞的安全风险,而且对工程机械的操作人员的人身安全也构成威胁。
2、目前,现有技术的解决办法是在工程机械上设置摄像头和照明灯,尤其是在工程机械后部设置后置摄像头和后置照明灯,从而让操作人员能够从驾驶室的屏幕上直接观察到的行驶方向上的障碍物,以进行应对。但是,该方法存在两点缺陷:一是当工程机械的行驶方向上出现障碍物时无法自动报警,需要工程机械的操作人员主动查看屏幕;二是在夜间工作时,因为灯光光线不佳,操作人员可能会看不清楚工程机械的行驶方向是否存在障碍物。
技术实现思路
1、本公开的出发点在于,提供了用于对工程机械的行驶方向上的障碍物进行报警的方法,从而解决了现有技术中存在的上述问题。
2、本公开的实施例提供了一种用于对工程机械的行驶方向上的障碍物进行报警的方法,所述工程机械上设置有测距传感器,所述方法包括:
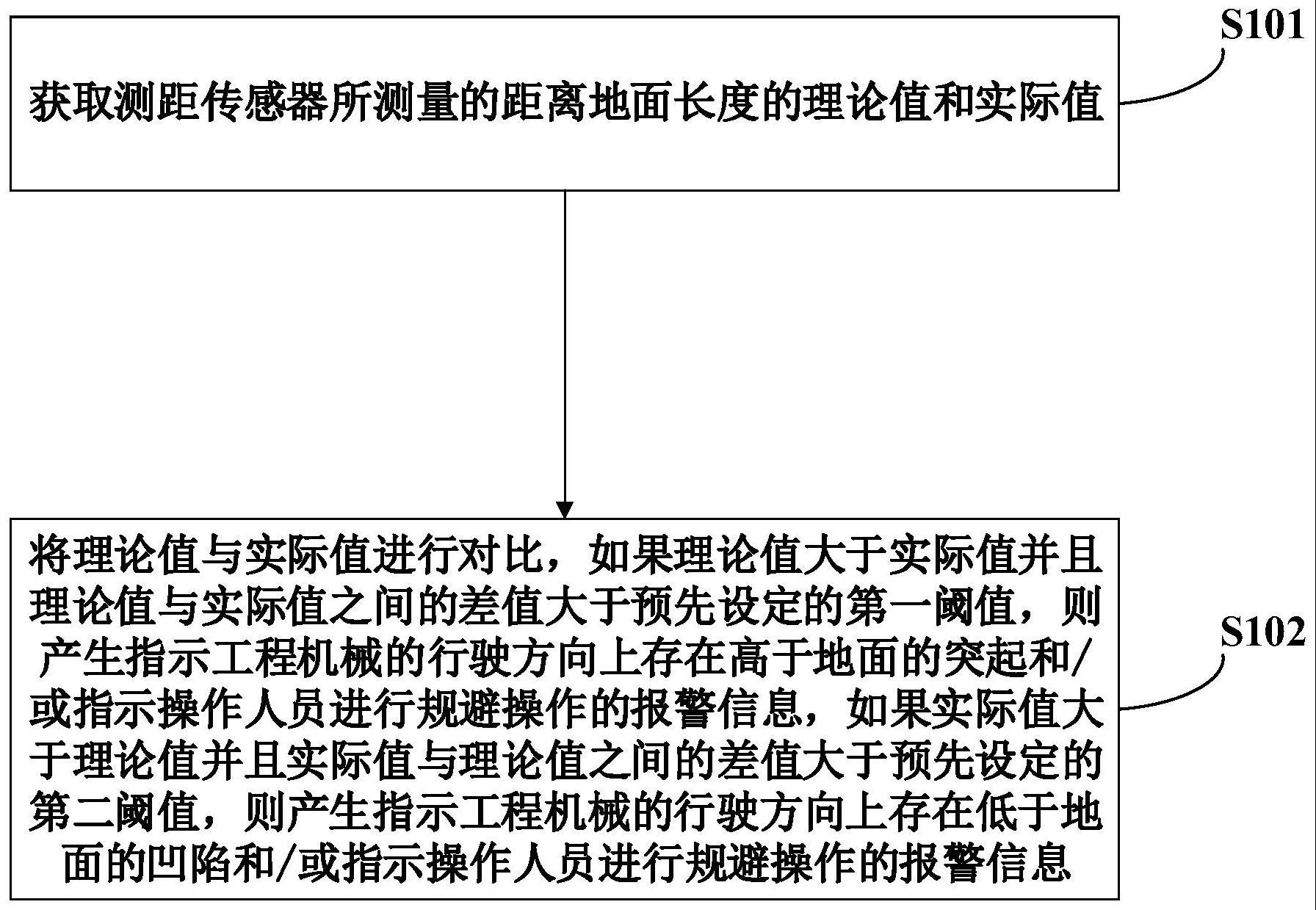
3、获取测距传感器所测量的距离地面长度的理论值和实际值;
4、将理论值与实际值进行对比,如果理论值大于实际值并且理论值与实际值之间的差值大于预先设定的第一阈值,则产生指示工程机械的行驶方向上存在高于地面的突起和/或指示操作人员进行规避操作的报警信息,如果实际值大于理论值并且实际值与理论值之间的差值大于预先设定的第二阈值,则产生指示工程机械的行驶方向上存在低于地面的凹陷和/或指示操作人员进行规避操作的报警信息。
5、可选地,获取测距传感器所测量的距离地面长度的理论值包括:将所述工程机械的车身处于水平位置时所述测距传感器检测到的距离地面长度的实际值作为所述理论值。
6、可选地,获取测距传感器所测量的距离地面长度的理论值包括:根据所述测距传感器的安装参数计算得到所述理论值。
7、可选地,获取测距传感器所测量的距离地面长度的理论值包括:根据所述测距传感器的安装参数、作为参照物的另一测距传感器的安装参数、以及所述另一测距传感器在所述工程机械的车身处于水平位置时所检测到的距离地面长度的实际值计算得到所述理论值。
8、可选地,所述工程机械的后部设置有两个测距传感器,两个测距传感器在地面上的测量点分别与所述工程机械的两侧的最大宽度处对齐,则所述方法还包括:
9、如果两个测距传感器的检测结果同时导致产生报警信息,则在报警信息中进一步指示工程机械的行驶方向上的障碍物的宽度大于所述工程机械的两侧的最大宽度和/或指示操作人员停止在行驶方向上继续行驶。
10、可选地,在获取测距传感器的理论值和实际值并且根据理论值与实际值的对比产生报警信息之前,所述方法还包括:
11、判断测距传感器是否对准工程机械的行驶方向,如果判断结果为是,则执行获取测距传感器的理论值和实际值以及根据理论值与实际值的对比产生报警信息的步骤,如果判断结果为否,则不执行获取测距传感器的理论值和实际值以及根据理论值与实际值的对比产生报警信息的步骤。
12、可选地,所述工程机械是挖掘机,所述挖掘机上设置有用于检测挖掘机的上下车之间的偏转角度差的角度传感器,则判断测距传感器是否对准工程机械的行驶方向包括:
13、根据所述角度传感器的检测结果判断挖掘机上的测距传感器是否对准挖掘机的行驶方向。
14、可选地,在获取测距传感器的理论值和实际值并且根据理论值与实际值的对比产生报警信息之前,所述方法还包括:
15、判断工程机械的车身是否处于水平位置,如果判断结果为是,则执行获取测距传感器的理论值和实际值以及根据理论值与实际值的对比产生报警信息的步骤,如果判断结果为否,则不执行获取测距传感器的理论值和实际值以及根据理论值与实际值的对比产生报警信息的步骤。
16、可选地,所述工程机械是挖掘机,所述挖掘机上设置有用于检测挖掘机的车身是否处于水平位置的倾角传感器,则判断工程机械的车身是否处于水平位置包括:
17、根据所述倾角传感器的检测结果判断挖掘机的车身是否处于水平位置。
18、根据本公开的又一方面,提出一种具有控制装置的工程机械,所述控制装置包括:处理器;以及存储器,用于存储所述处理器的可执行指令;其中,该处理器被配置为执行该可执行指令以实施如上所述的方法。
19、本公开的实施例的用于对工程机械的行驶方向上的障碍物进行报警的方法至少具有以下优点:
20、本公开中,通过将测距传感器所测量的距离地面长度的理论值和实际值进行对比,从而判断工程机械的行驶方向上是否存在障碍物,并且在存在障碍物时产生报警信息,从而能够对障碍物进行自动报警,无需操作人员主动发现。另外,由于测距传感器不受光照强度的影响,即使在光线不佳时也能够实现对障碍物的自动报警。
技术特征:
1.一种用于对工程机械的行驶方向上的障碍物进行报警的方法,其特征在于,所述工程机械上设置有测距传感器,所述方法包括:
2.根据权利要求1所述的方法,其中,获取测距传感器所测量的距离地面长度的理论值包括:将所述工程机械的车身处于水平位置时所述测距传感器检测到的距离地面长度的实际值作为所述理论值。
3.根据权利要求1所述的方法,其中,获取测距传感器所测量的距离地面长度的理论值包括:根据所述测距传感器的安装参数计算得到所述理论值。
4.根据权利要求1所述的方法,其中,获取测距传感器所测量的距离地面长度的理论值包括:根据所述测距传感器的安装参数、作为参照物的另一测距传感器的安装参数、以及所述另一测距传感器在所述工程机械的车身处于水平位置时所检测到的距离地面长度的实际值计算得到所述理论值。
5.根据权利要求1所述的方法,其中,所述工程机械的后部设置有两个测距传感器,两个测距传感器在地面上的测量点分别与所述工程机械的两侧的最大宽度处对齐,则所述方法还包括:
6.根据权利要求1所述的方法,其中,在执行权利要求1中所述的步骤之前,所述方法还包括:
7.根据权利要求6所述的方法,其中,所述工程机械是挖掘机,所述挖掘机上设置有用于检测挖掘机的上下车之间的偏转角度差的角度传感器,则判断测距传感器是否对准工程机械的行驶方向包括:
8.根据权利要求1所述的方法,其中,在执行权利要求1中所述的步骤之前,所述方法还包括:
9.根据权利要求8所述的方法,其中,所述工程机械是挖掘机,所述挖掘机上设置有用于检测挖掘机的车身是否处于水平位置的倾角传感器,则判断工程机械的车身是否处于水平位置包括:
10.一种具有控制装置的工程机械,所述控制装置包括:
技术总结
本公开涉及一种用于对工程机械的行驶方向上的障碍物进行报警的方法,工程机械上设置有测距传感器,所述方法包括:获取测距传感器所测量的距离地面长度的理论值和实际值;将理论值与实际值进行对比,如果理论值大于实际值并且理论值与实际值之间的差值大于预先设定的第一阈值,则产生指示工程机械的行驶方向上存在高于地面的突起和/或指示操作人员进行规避操作的报警信息,如果实际值大于理论值并且实际值与理论值之间的差值大于预先设定的第二阈值,则产生指示工程机械的行驶方向上存在低于地面的凹陷和/或指示操作人员进行规避操作的报警信息。
技术研发人员:吕超,肖飞,张小娜,彭斌
受保护的技术使用者:卡特彼勒S.A.R.L公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!