一种智能化交通信息数据分析管理系统的制作方法
本发明涉及车辆位置调节,具体涉及一种智能化交通信息数据分析管理系统。
背景技术:
1、智能化交通是不可或缺的重要基础设施,也是未来的发展趋势之一。智能交通系统具有自动化、高效性、安全性等特点,成为了现代交通领域的亮点和重要研发方向。智能交通的应用范围将越来越广泛,前景将会更加广阔。智能交通将会满足人们日益增长的出行需求。城市化进程越来越快,智能交通系统可以减少交通拥堵,提高道路利用率,让城市交通更加畅通。且在给予人们便利的同时,还要保证道路安全是首要任务。智能交通系统可以大大降低交通事故的发生率,也可以对道路交通进行精细管理。
2、在智能驾驶场景中,车辆通过与道路智能终端相连接,互相传输数据,进行行驶方向的判断。但是在实际行驶过程中,车辆信号之间存在互相干扰的情况,因此传统直接通过测量值进行马尔科夫预测的结果容易出现偏差,进而会导致车辆行驶状态出现偏差,最终影响交通安全。
技术实现思路
1、为了解决直接通过测量值进行马尔科夫预测的结果容易出现偏差的技术问题,本发明的目的在于提供一种智能化交通信息数据分析管理系统,所采用的技术方案具体如下:
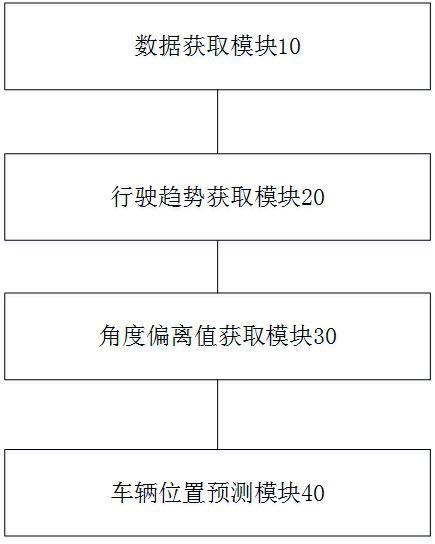
2、数据获取模块,用于获取车辆在当前位置的行驶方向、车辆所处的信号范围以及信号范围内的车道线;
3、行驶趋势获取模块,用于将平行于车道线且平分信号范围的线段作为车道中心线,将车辆到车道中心线的最短线段作为偏离线;根据车辆的可行驶方向和偏离线的夹角和偏离线的长度确定车辆的行驶趋势;
4、角度偏离值获取模块,用于根据车辆的行驶趋势最大值对应的可行驶方向和上一位置至当前位置的行驶方向确定车辆的角度偏离值;
5、车辆位置预测模块,用于对车辆的角度偏离值进行筛选得到低角度偏离值序列;根据低角度偏离值序列中各角度偏离值对应的位置,对车辆的位置序列进行调整,得到车辆的预测位置序列。
6、优选的,所述根据车辆的可行驶方向和偏离线的夹角和偏离线的长度确定车辆的行驶趋势,包括:
7、获取车辆的当前信号强度,将车辆的可行驶方向与偏离线的夹角作为偏离角度,当车辆的偏离角度属于预设偏离范围时,将偏离角度和偏离线的长度的乘积作为第一初始趋势,将第一初始趋势和预设调节系数的和值作为分母,将预设变化倍率和车辆的当前信号强度的乘积作为分子,将分子和分母的比值的归一化值作为行驶趋势;当车辆的偏离角度不属于预设偏离范围时,将偏离角度和偏离线的长度的乘积作为第一初始趋势,将第一初始趋势和预设调节系数的和值作为分母,将预设变化倍率和车辆的当前信号强度的乘积作为分子,将分子和分母的比值的归一化值的负数作为车辆的可行驶方向的行驶趋势。
8、优选的,所述根据车辆的行驶趋势最大值对应的可行驶方向和上一位置至当前位置的行驶方向确定车辆的角度偏离值,包括:
9、将行驶趋势最大值对应的可行驶方向和上一位置至当前位置的行驶方向的夹角值作为角度偏离值。
10、优选的,所述对车辆的角度偏离值进行筛选得到低角度偏离值序列,包括:
11、将车辆的角度偏离值按照从小到大的顺序进行排序,得到对应的角度偏离值序列;由前向后依次从角度偏离值序列中选取角度偏离值,直至满足终止选取条件,停止从角度偏离值序列中选取角度偏离值,由选取出的角度偏离值构建对应的低角度偏离值序列。
12、优选的,所述终止选取条件为:
13、计算选取出的角度偏离值对应的标准差;当最后一个被选取出的角度偏离值和倒数第二个被选取出的角度偏离值的差值绝对值大于预设倍数的标准差时,停止角度偏离值的选取。
14、优选的,所述根据低角度偏离值序列中各角度偏离值对应的位置,对车辆的位置序列进行调整,得到车辆的预测位置序列,包括:
15、选取低角度偏离值序列中的任意一个角度偏离值作为目标偏离值;
16、将目标偏离值对应的位置作为目标位置;对于车辆的位置序列中位于目标位置前一个的位置,不改变前一个位置到目标位置的移动路径长度,将行驶方向调整为前一个位置的行驶趋势最大值对应的可行驶方向,得到调整后的位置;对于车辆的位置序列中位于目标位置后一个的位置,不改变目标位置到后一个位置的移动路径长度,将行驶方向调整为目标位置的行驶趋势最大值对应的可行驶方向,得到调整后的位置,根据调整后的位置,得到车辆的预测位置序列。
17、本发明实施例至少具有如下有益效果:
18、本发明设计车辆位置调节技术领域。该系统首先通过行驶趋势获取模块获取车辆的行驶趋势,该行驶趋势是通过对车辆的可行驶方向和对应的偏离线进行分析,可以反映车辆的移动趋势。通过角度偏离值获取模块获取车辆的角度偏离值,该角度偏离值是通过车辆实际的方向和行驶趋势最大值对应的方向进行比较得到的,该角度偏离值可以反映车辆的偏离程度,角度偏离值越大,则车辆偏离正常行驶路径的概率越大。最后通过车辆位置预测模块得到低角度偏离值序列,低角度偏离值序列中的角度偏离值为误差较低的数据,故进行一步的通过低角度偏离值序列中各角度偏离值对应的位置对车辆的位置序列进行调整,得到更准确的车辆的预测位置序列,即实现了对当前车辆的状态和车辆行驶过程中出现的特性进行预测分析,使得真实车辆数据中的噪声得以去除,以后续达到得到的预测位置序列更加准确的特点,减少了直接通过测量值得到预测结果时容易出现偏差的问题,提高了位置预测的精确度。
技术特征:
1.一种智能化交通信息数据分析管理系统,其特征在于,该系统包括以下模块:
2.根据权利要求1所述的一种智能化交通信息数据分析管理系统,其特征在于,所述根据车辆的可行驶方向和偏离线的夹角和偏离线的长度确定车辆的行驶趋势,包括:
3.根据权利要求1所述的一种智能化交通信息数据分析管理系统,其特征在于,所述根据车辆的行驶趋势最大值对应的可行驶方向和上一位置至当前位置的行驶方向确定车辆的角度偏离值,包括:
4.根据权利要求1所述的一种智能化交通信息数据分析管理系统,其特征在于,所述对车辆的角度偏离值进行筛选得到低角度偏离值序列,包括:
5.根据权利要求4所述的一种智能化交通信息数据分析管理系统,其特征在于,所述终止选取条件为:
6.根据权利要求1所述的一种智能化交通信息数据分析管理系统,其特征在于,所述根据低角度偏离值序列中各角度偏离值对应的位置,对车辆的位置序列进行调整,得到车辆的预测位置序列,包括:
技术总结
本发明涉及车辆位置调节技术领域,具体涉及一种智能化交通信息数据分析管理系统。该系统包括以下模块,数据获取模块用于获取车辆在当前位置的行驶方向、车辆所处的信号范围以及信号范围内的车道线;行驶趋势获取模块用于确定各行驶方向下车辆的形式趋势;角度偏离值获取模块用于确定车辆的角度偏离值;车辆位置预测模块用于对车辆的位置序列进行调整,得到车辆的预测位置序列。本发明通过对当前车辆的状态和车辆行驶过程中出现的特性进行预测分析,使得真实观测数据值中的噪声得以去除,达到用于预测的数据更加准确的特点。
技术研发人员:邢吉普,袁辉,张玉沛
受保护的技术使用者:山东纵云信息技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!