一种用于机场飞行区潜在冲突分析预测的方法
1.本发明属于机场交通管理领域,尤其是涉及一种用于机场飞行区潜在冲突分析预测的方法。
背景技术:
2.民用机场作为航空运输基础设施,近几年在数量、规模、业务量等各方面急剧增加;飞行区内运行的航空器和保障设备快速增多,活动目标之间碰撞冲突、飞行区运营安全隐患等问题也逐渐产生,给机场飞行区的管制工作带来了巨大压力和挑战。
3.现有技术条件下,将复杂网络理论应用于民航领域的研究大多数是以机场为节点,两机场之间的航线作为边进行复杂网络建模,通常以航路点为节点,以航段为边建立了空中交通复杂网络模型,用于空中交通的流量分析、拥堵识别等;也有以空中的无人机为节点,以影响关系为连边,建立了无人机集群复杂网络模型,分析无人机运行过程中的相互影响和冲突产生机制。
4.而机场飞行区是飞机起降和保障的场所,机场飞行区是一个动态演化的开放系统,随机性与规律性共存,飞行区活动目标集合是一个由多个单元构成的复杂系统,具有复杂网络的小世界、无标度等特征,上述现有技术中的复杂网络建模方法,无法对用于机场地面飞行区的潜在冲突进行有效的预测。
技术实现要素:
5.有鉴于此,本发明旨在提出一种用于机场飞行区潜在冲突分析预测的方法,可以实现对机场地面飞行区潜冲突进行准确的预测,为管制人员和航空器或车辆驾驶员提供帮助,在可能发生碰撞时提高警惕,将飞行区运行风险端口前移,有效降低碰撞发生的可能性。
6.为达到上述目的,本发明的技术方案是这样实现的:
7.一种用于机场飞行区潜在冲突分析预测的方法,包括:
8.步骤一:建立飞行区复杂网络模型:在机场地面飞行区域内,把活动中的航空器目标几何中心以及活动中的车辆目标几何中心作为节点,以节点为中心划定圆形区域,当两个圆形区域出现交集时,则两个目标之间存在潜在冲突,此时存在潜在冲突的两个节点之间连线作为连边;
9.步骤二:确定飞行区复杂网络模型的特征指标;
10.步骤三:获取特征指标时间序列:对需要潜在冲突预测的飞行区按照设定的时间间隔,在每一个时间点上建立步骤一中飞行区复杂网络模型,计算对应的特征指标,组成特征指标的时间序列;
11.步骤四:对机场地面飞行区潜在冲突进行预测:使用得到的特征指标时间序列对长短期记忆神经网络模型lstm进行训练,实现对未来该机场地面飞行区特征指标预测。
12.在步骤二中,特征指标包括:
13.平均度表示飞行区复杂网络模型中每个节点周围与其存在潜在冲突的活动
目标数量平均值;
14.平均点强表示飞行区复杂网络模型中每个节点存在潜在冲突压力的平均值;
15.平均加权聚类系数表示飞行区复杂网络模型中航空器目标或车辆目标周围活动目标的聚集程度;
16.网络密度nd:表示飞行区复杂网络模型中存在连边数量占网络最大可容纳连边数量的比重。
17.相对于现有技术,本发明所述的一种用于机场飞行区潜在冲突分析预测的方法,具有以下优势:
18.本发明所述的一种用于机场飞行区潜在冲突分析预测的方法,可以实现对机场地面飞行区潜冲突进行准确的预测,为管制人员和航空器或车辆驾驶员提供帮助,在可能发生碰撞时提高警惕,将飞行区运行风险端口前移,有效降低碰撞发生的可能性。
附图说明
19.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
20.在附图中:
21.图1为本发明实施例所述的一种用于机场飞行区潜在冲突分析预测的方法步骤一示意图;
22.图2为本发明实施例所述的一种用于机场飞行区潜在冲突分析预测的方法聚集程度示意图;
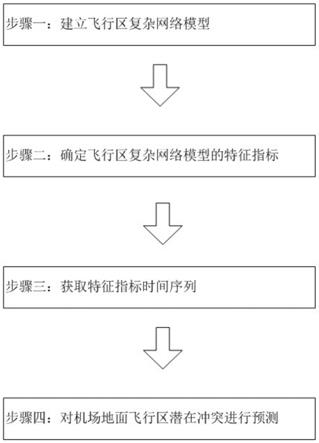
23.图3为本发明实施例所述的一种用于机场飞行区潜在冲突分析预测的方法流程示意图。
具体实施方式
24.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
25.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
26.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
27.下面将参考附图并结合实施例来详细说明本发明。
28.如图3所示,一种用于机场飞行区潜在冲突分析预测的方法,包括:
29.步骤一:建立飞行区复杂网络模型:在机场地面飞行区域内,把活动中的航空器目标几何中心以及活动中的车辆目标几何中心作为节点,以节点为中心划定圆形区域,当两个圆形区域出现交集时,则两个目标之间存在潜在冲突,此时存在潜在冲突的两个节点之间连线作为连边;
30.步骤二:确定飞行区复杂网络模型的特征指标;
31.步骤三:获取特征指标时间序列:对需要潜在冲突预测的飞行区按照设定的时间间隔,在每一个时间点上建立步骤一中飞行区复杂网络模型,计算对应的特征指标,组成特征指标的时间序列;
32.步骤四:对机场地面飞行区潜在冲突进行预测:使用得到的特征指标时间序列对长短期记忆神经网络模型lstm进行训练,实现对未来该机场地面飞行区特征指标预测。
33.在步骤二中,特征指标包括:
34.平均度表示飞行区复杂网络模型中每个节点周围与其存在潜在冲突的活动目标数量平均值;
35.平均点强表示飞行区复杂网络模型中每个节点存在潜在冲突压力的平均值;
36.如图2所示,平均加权聚类系数表示飞行区复杂网络模型中航空器目标或车辆目标周围活动目标的聚集程度;
37.网络密度nd:表示飞行区复杂网络模型中存在连边数量占网络最大可容纳连边数量的比重;
38.网络效率ne:表示飞行区复杂网络模型中任意一个节点到另一个节点所需中转次数的平均值。
39.在步骤二中:
40.平均度计算方法如下:
[0041][0042]
n是节点总数;i及j均表示网络中的节点;i,j=1,2,3,4,
…
,n且i≠j;α
ij
是从节点i到节点j的连边,若节点i到节点j之间有连边,则α
ij
=1,否则α
ij
=0;
[0043]
平均点强计算方法如下:
[0044][0045][0046][0047]
其中,n是节点总数;i及j均表示网络中的节点;i,j=1,2,3,4,
…
,n且i≠j;α
ij
是
从节点i到节点j的连边,若节点i到节点j之间有连边,则α
ij
=1,否则α
ij
=0;ω
ij
表示节点i到节点j的连边边权;表示节点i到节点j的迫近率;d
ij
表示节点i到节点j之间的相对距离,v
ij
表示节点i到节点j之间的相对速度;
[0048]
在本实施例中,从先进场面活动引导和控制系统a-smgcs获取航空器和车辆位置和速度数据,包含航空器和车辆的经纬度坐标,移动方向和速度,通过矢量加减计算得到两个活动目标之间的相对距离d
ij
和相对速度v
ij
。
[0049]
平均加权聚类系数计算方法如下:
[0050][0051][0052][0052][0052][0053]ci
表示节点i的加权聚类系数,ki是节点i的度,j,k分别是与节点i有连边的两个节点,j≠k;当ki《2时,ci=0;
[0054]
ω
ij
表示节点i到节点j的连边边权,ω
jk
表示节点j到节点k的连边边权,ω
ik
表示节点i到节点k的连边边权,max(ω)是飞行区复杂网络模型中连边边权最大值;
[0055]
网络密度nd计算方法如下:
[0056][0057]
n是节点总数;e表示飞行区复杂网络模型中存在连边的个数;
[0058]
网络效率ne计算方法如下:
[0059][0060]
n是节点总数;i及j均表示网络中的节点;i,j=1,2,3,4,
…
,n且i≠j;d
ij
表示节点i到节点j的最短路径距离,最短路径是指从节点i出发,沿着连边到达另一个节点j的路径中,边权之和最小的路径是最短路径,最短路径的边权之和是最短路径距离;当节点i与节点j之间没有连边时,d
ij
=0。
[0061]
如图1所示,在步骤一中:航空器划定圆形区域的半径是150米,车辆划定圆形区域的半径是100米。
[0062]
在步骤三中:时间间隔是10秒。
[0063]
在一个实施例中,需要潜在冲突预测的飞行区中,时间间隔是10秒,共演化1000分钟,即共6000次飞行区复杂网络模型建模,前5500次的特征指标时间序列作为训练集,后500次的特征指标时间序列作为测试集,得到长短期记忆神经网络模型lstm对未来该机场地面飞行区特征指标进行潜在冲突预测,方便现场人员进行调度或及时规避。
[0064]
复杂网络模型特征指标
[0065][0066]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1