一种新型高速公路中分带开口旋转桶式智慧活动护栏
1.本发明涉及高速公路交通安全设施领域及高速公路交通运营安全实时监控领域,具体涉及一种新型高速公路中分带开口旋转桶式智慧活动护栏。
背景技术:
2.由于高速公路运营车速快,发生事故后果严重,据统计高速公路交通事故死亡率高达74%,其中与中分带护栏相关事故约占30%,且目前大部分事故易发生在中分带开口护栏端部。目前国内已通过实车足尺碰撞试验并满足《公路护栏安全性能评价标准》(jtg b05-01-2013) 的中央分隔带开口护栏型式主要有预应力式活动护栏、框架式活动护栏、梯形座式活动护栏、组合式活动护栏等不同的型式,这些传统的活动护栏型式对保障高速公路安全运营起到重要的保障作用,然而这些传统活动护栏的设计理念都是基于通过自身与车辆的形变来吸收碰撞能量,造成护栏的刚性越高,发生碰撞事故时对驾驶员的损伤就越大,导致交通事故严重程度居高不下。
3.近年来,美国、韩国、日本等国家提出一种“革命性”的旋转桶式护栏造型,防撞护栏安装了旋转桶,碰撞事故时旋转桶通过其旋转和变形吸能,有效转换了车辆在碰撞过程中部分能量。相比于传统护栏通过车辆与护栏自身的形变吸收碰撞能量,旋转桶式护栏在使用时其吸能和导向效果明显,碰撞发生后反弹角度和距离小,可以有效避免二次事故发生,根据美国、韩国、日本等国家在高速公路路侧的应用情况分析,可以降低交通事故死亡率90%以上。因此,国内对旋转桶式护栏在解决旋转桶的寿命问题后正在不断推广应用。
4.另外根据交通安全领域专家学者统计,交通事故应急救援的时间如能从25分钟减少到15分钟,那么高速公路上交通事故死亡率将会减少1/3以上。
5.目前高速公路中分带开口传统活动护栏和基于路侧旋转桶式护栏改造的可以便捷开启的新型中分带旋转桶式活动护栏都无法解决交通事故发生时及时告警,降低事故应急救援等待时间,从而降低交通事故死亡率的目的。
6.中国专利cn201721223265.3公开了一种间隔接地式带旋转体的交通护栏,其电路集成筒内的红外线器能发出红外线,当汽车驶近时,红外线遭受到阻碍,电信号传输受到阻碍,电路集成筒一边会将信号传输到电连接筒,电连接筒将电信号转换为光信号发出,警示灯亮起,电路集成筒另一边会将电信号传输给扬声喇叭,激活扬声喇叭内部的蜂鸣器,使蜂鸣器发出刺耳的蜂鸣声,提示人们距离过近。该交通护栏只适合设置在路侧,且仅具有现场报警功能,事故发生无法及时告警高速公路相关管理用户。
7.中国专利cn201810863981.0公开了一种弹性旋转体、旋转护栏及事故测控系统,它包括旋转本体,其上沿圆周方向至少设置有一个容纳腔,容纳腔中设置有至少一个传感器,传感器用于采集任意撞击汽车的撞击信号芯片控制器,与传感器电性连接,用于接收传感器输出的撞击信号,并将该撞击信号转化为数据信号,及时传输出去。弹性旋转体外弹性旋转体将传感器与芯片控制器结合为一体,传感器及时的接收汽车的撞击信息,然后传感器接收到撞击信息,并将信息传输到芯片控制器,芯片控制器将撞击信号输出,通过智能化
的设备实现数据传输,将汽车撞击的信息及时传输至相应的平台,可以对受伤的人员实现及时的救助,减少人员伤亡,保障人们的生命安全。经分析,该护栏的传感器设置在旋转桶内,虽然可以避免风吹日晒,延长使用寿命,但是传感器功能较单一,无法实现事故前及时预警,对碰撞后事故的严重程度无法识别,对运营中交通流量和车速无法检测,对车型和车牌无法识别,无法满足监控管理用户要求。
8.中国专利cn202120726596.9提供一种带万向轮的高速公路中央分隔带旋转桶式活动护栏,包括活动护栏,所述活动护栏两侧下部设置有万向轮组件,所述活动护栏包括至少两个前后对称设置的横梁架,相邻横梁架之间设置有连接机构,所述连接机构两侧设置有多个立柱,每个立柱外套有旋转桶,每个立柱经u型钢板分别与两个横梁架连接,其中长的立柱向下延伸至位于地基内部的钢套筒。该实用新型设计合理,在应急情况下方便开启,日常维修更换方便,拆卸后可人工推移,同时可以克服施工中存在的单元活动护栏之间的上、下高差和左、右平差,但是该活动护栏属于对传统活动护栏的改善和变形,需要新增满足要求的功能模块。
9.因此,需要进一步完善高速公路中分带开口旋转桶式活动护栏的功能,在满足防撞和导向要求、安拆快速、更换维修方便等功能要求后,还应具备事故前及时预警、事故发生时及时告警、事故发生后数据可查等功能;在有效降低事故应急救援时间的同时,应能监控并传输正常运营及交通拥堵发生时的交通流车速、流量等监控参数。满足上述功能要求的新型旋转桶式智慧活动护栏必将有效降低高速公路交通事故死亡率,进一步提高高速公路运营安全水平和通行能力,保障经济社会平稳运行,意义十分重大。
技术实现要素:
10.本发明的目的在于具备高速公路中分带开口部事故前及时预警、事故发生时及时告警、事故发生后数据可查等功能,因此提供一种新型高速公路中分带开口旋转桶式智慧活动护栏,在有效降低事故应急救援时间的同时能监控并传输正常运营及交通拥堵发生时的交通流车速、流量等监控参数。
11.为实现上述目的,本发明的技术方案是:一种新型高速公路中分带开口旋转桶式智慧活动护栏,包括旋转桶式智慧活动护栏,在活动护栏两侧过渡段端部外侧面安装有红外线感应装置和摄像装置;在活动护栏两侧过渡段端部内侧长立柱上安装有预警装置;在活动护栏的每个旋转桶内置感应芯片;红外线感应装置、摄像装置和预警装置通过感应芯片和云端控制中心实现信号传输;在活动护栏两侧过渡段端部上横梁安装有太阳能板组件,以为各模块提供能源。
12.在本发明一实施例中,所述活动护栏两侧过渡段端部两外侧面分别安装有红外线感应装置,红外线感应装置在高速公路中分带开口端部外侧面对称、成组设置,当车辆行驶过程中触碰红外线,红外线中断,信号传输至预警装置。
13.在本发明一实施例中,所述活动护栏两侧过渡段端部两外侧面分别安装有摄像装置,摄像装置成组设置,用于高速公路中分带开口部路段的交通流量和车速观测、车牌与车型识别,并实时传输观测信号至云端控制中心。
14.在本发明一实施例中,所述预警装置收到红外线感应装置发生的信息时发出声光报警,并将信息传输至云端控制中心,告警管理用户及导航用户。
15.在本发明一实施例中,所述感应芯片可以感应事故发生时旋转桶压力、变形和转速参数,并将信息传输至云端控中心,用于碰撞事故严重程度识别。
16.在本发明一实施例中,所述红外线感应装置、摄像装置、预警装置、感应芯片和云端控制中心可以实现信号互联互通。
17.在本发明一实施例中,所述预警装置与红外线感应装置组网,以分别同时监控上行车道与下行车道运营车辆。
18.在本发明一实施例中,所述云端控制中心包括交通流量检测模块、车速检测模块、车牌识别模块、车型识别模块、车辆与活动护栏碰撞事故严重程度识别模块;云端控制中心向摄像装置发送摄取指令,摄像装置实时摄取车辆影像并传输给云端控制中心,云端控制中心将影像信息发送给各功能模块,各功能模块根据影像信息分析交通流量数据、车辆行驶速度、识别车辆牌照及型号。
19.相较于现有技术,本发明具有以下有益效果:本发明可以实现对高速公路中分带开口活动护栏事故前实时预警;事故中及时告警事故发生位置等信息,并可以根据旋转桶感应芯片传输的压力、变形和转速参数同步识别事故的严重程度,以便云端控制中心根据事故严重程度及时启动相关应急预案;事故后可以通过存储的数据和图片还原事故过程,为交警事故调查与认定等提供可靠依据。由于智慧护栏事故预警和传输的及时性,并同时能监控并传输正常运营及交通拥堵发生时的交通流车速、流量等监控参数,将有效降低高速公路交通事故死亡率的同时,进一步提升高速公路运营安全水平和通行能力。
附图说明
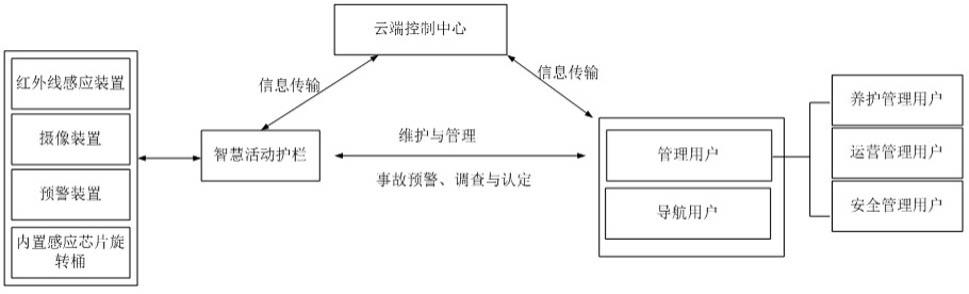
20.图1为智慧活动护栏、云端控制中心、管理用户、导航用户之间的构架图;图2为高速公路中分带开口旋转桶式智慧活动护栏俯视图;图3为高速公路中分带开口旋转桶式智慧活动护栏立面图;图4为内置芯片旋转桶与云端控制中心构架图;图5为交通参数检测装置工作流程示意图;图6为camshift 算法流程示意图;图7为特征匹配车速检测流程示意图;图8为基于灰度图像的车牌定位流程示意图;图9为车辆与活动护栏碰撞事故严重程度识别流程示意图。
21.图中:1-红外线感应装置,其中:1-1-红外线感应装置1、1-2-红外感应装置2、1-3-红外线感应装置3、1-4-红外感应装置4;2-摄像装置,其中:2-1-摄像装置1、2-2-摄像装置2;3-预警装置,其中:3-1-预警装置1、3-2-预警装置2;4-太阳能板组件,其中:4-1-太阳能板块组件1、4-2-太阳能板块组件2;5-旋转桶内置的感应芯片。
具体实施方式
22.下面结合附图,对本发明的技术方案进行具体说明。
23.本发明一种新型高速公路中分带开口旋转桶式智慧活动护栏,包括旋转桶式智慧活动护栏,在活动护栏两侧过渡段端部外侧面安装有红外线感应装置1和摄像装置2;在活动护栏两侧过渡段端部内侧长立柱上安装有预警装置3;在活动护栏的每个旋转桶内置感应芯片5;红外线感应装置1、摄像装置2和预警装置3通过感应芯片和云端控制中心实现信号传输;在活动护栏两侧过渡段端部上横梁安装有太阳能板组件4,以为各模块提供能源。
24.以下为本发明一具体实例。
25.如图1-5所示,一种新型高速公路中分带开口旋转桶式智慧活动护栏,智慧活动护栏将车辆与活动护栏实时运营状况通过云端控制中心传输至管理用户,管理用户包括养护管理用户、运营管理用户和安全管理用户,各管理用户根据云端控制中心实时传输信号和分析决策结果,对活动护栏采取相应的维修、事故预警、调查与认定等管理措施。
26.所述在活动护栏两侧端部外侧面分别安装了红外线感应装置1,红外感应装置1-1和1-2组成一组,监控上行车道方向交通;红外感应装置1-3和1-4组成另一组,监控下行车道方向交通;当车辆在行驶过程中触碰了红外线,红外线中断,感应装置发出预警信号,预警装置3收到信号,发出声光提醒驾驶员,同时该信息事件通过无线网络传输到云端控制中心,云端控制中心处理后及时传输给管理用户和导航用户。
27.所述在活动护栏两侧过渡段端部外侧面分别安装了摄像装置2,摄像装置2-1和2-2组成一组,摄像装置2-3和2-4组成一组,各组装置内置感应芯片实现信号互通,并将观测信号传输至云端控制中心用于交通流量与车速观测、车牌与车型识别。
28.所述在活动护栏两侧过渡段端部长立柱上分别安装了预警装置,预警装置3-1与红外感应装置1-1及1-2联合监控上行车道方向交通,预警装置3-2与红外感应装置1-3及1-4联合监控下行车道方向交通,红外线中断感应芯片收到预警信号,即刻发出声光报警,并将信息传输至云端控制中心,云端控制中心将信息处理后传输至管理用户和导航用户。
29.所述在每个旋转桶内置感应芯片5,感应事故发生时旋转桶压力、变形和转速等参数,并将信息传输至云控中心,用于碰撞事故严重程度识别。
30.所述在活动护栏过渡段端部两侧上横梁分别安装了太阳能板组件4,由太阳能板4-1和太阳能板4-2组成,分别为两侧的各种装置感应器提供能源。
31.为了让本领域一般技术人员进一步了解智慧活动护栏与云端控制中心各模块之间的工作流程以及交通流参数检测与具体算法,简单介绍如下:云端控制中心各功能包含交通流量检测模块、车速检测模块、车牌识别模块和车型识别模块、车辆与活动护栏碰撞事故严重程度识别模块;云端控制中心向摄像装置发送摄取指令,摄像装置实时摄取车辆影像并传输给控制中心,控制中心将影像信息发送给各功能模块,各功能模块根据影像信息分析交通流量数据、车辆行驶速度、识别车辆牌照及型号。
32.1、交通流量检测算法交通流量检测采用目前应用较成熟的基于轮廓中心的多目标跟踪算法(continuously adaptive mean-shift,camshift算法),工作流程如图6所示,其原理为:利用hsv颜色空间图像中的h分量的直方图模型,经过反向投影计算,获得一个为灰度图像的颜色概率分布图。人工初始化搜索框,并计算搜索框内图像的颜色概率分布。在下一帧中,利用此颜色概率分布图作为 mean-shift算法的初始化数据,计算新的搜索窗口,如此循
环,以达到在连续视频序列中对选定目标的持续跟踪的目的。camshift 算法的优势是可以有效避免物体被遮挡,克服物体大小发生变化导致跟踪失败的问题。由于 camshift 算法只利用h分量的直方图进行计算,所以该算法对系统资源利用率较低,每帧算法执行时间较短。
33.camshift 算法由以下两个部分组成:(1)反向投影(back projection):由于光照变化对rgb颜色空间的影响较大,首先需要将图像从rgb空间转化到hsv空间;得到hsv空间的图像之后,人工初始化搜索窗口,在窗口中,分离其中的h分量,对h分量做直方图;对直方图中的每个像素的值用相应的颜色出现的概率值替换,这样就完成了反向投影的过程,获得一个为单通道灰度图像的颜色概率分布图。
34.(2)简化的 mean-shift:使用一个矩形核对mean-shift公式简化,使得mean-shift 向量简化为计算图像像素分布的重心。对上一步得到的h分量的颜色概率分布图使用此简化的mean-shift 算法,得到新的搜索窗口的尺寸与中心坐标,使用得到的新窗口初始化下一帧跟踪的mean-shift算法,以达到对目标物体进行持续跟踪的目的。
35.2、车速检测算法车速检测采用基于视频的车速检测算法,如图7所示,利用特征匹配检测车速,基于车辆特征在短时间内的不变性,对不同帧的车辆图像特征进行匹配,从而测量某段时间内车辆不同位置间的像素距离。首先锁定视频中每一帧图像中的被观测对象的目标特征,各帧图像间对同一辆车进行匹配,用图像坐标表示车辆在各帧图像中的位置信息,再对图像坐标摄像机标定从而获得车辆的行驶距离。由于帧差时间是已知的,距离除以帧差时间就能够得到车辆的行驶速度。
36.一般的车辆特征有角点特征、纹理特征、颜色特征、边缘轮廓特征、区域特征。基于 ros的车速检测方法,提取车辆 ros 质心作为参考点,因为相邻两帧检测到的车辆为同一车辆,本文采用存储参考点和车辆行驶方向的“最近邻”策略进行参考点匹配。图像车辆参考点经过检测与匹配后,可以得到参考点在当前帧和之前帧中的像素坐标,通过将像素坐标转成实际坐标,便可计算运动车辆的位移。
37.3、车牌识别算法车牌识别算法采用基于灰度图像的车牌定位方法,如图8所示,车牌一般是由字符、数字、背景边框等元素组成,在字符与背景处会形成了较强的边界,因此对于车辆图像要求的水平梯度,需要取某一个数值就可以得到车辆图像水平的梯度。如果车辆图像通过跳变点,则设置一个阀值,对于梯度上限大于该值的点记为边缘点,把一段连续的边缘点取一个点作为第一点,同时定义这个点为跳变点,对于水平方向边缘点要进行扫描,可以得出此行上跳变点的分布。如果对整个图像进行扫描处理就得到了整个跳变点的分布。
38.4、车型识别算法车型识别算法基于摄像头采集到汽车图像的像素面积,根据像素面积分析来确定车型,这种方式一般需要一定的值来确定。依据车辆在视频画面中所占的像素面积来判定车辆的车型,先拍摄各种车型的独立图片,通过计算机对独立图片进行分析处理,寻找车辆的长宽高及车辆的边界范围,根据这些参数确定车型,使用摄像机抓拍的车辆进行长宽高于范围测定然后与已知车型参数对比,符合的则认为是该车型。
39.5、车辆与活动护栏碰撞事故严重程度识别流程车辆与活动护栏旋转桶碰撞事故严重程度识别流程图如图9所示,当车辆与活动护栏旋转桶发生碰撞后,旋转桶内置的感应芯片可以感应旋转桶的压力、变形和转速参数,根据碰撞时旋转桶传输的压力值、变形值和转速值,对比轻微事故、一般事故、严重事故的阈值,可以判断交通事故的严重程度。
40.以上是本发明的较佳实施例,凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1