遥控器及遥控系统的制作方法
1.本技术涉及遥控技术领域,更具体而言,涉及一种遥控器及遥控系统。
背景技术:
2.市面上的体感遥控器多见于控制游戏端,其操控只限于上下左右和简单按键,无法完成对无人设备的控制。而一般用于控制无人设备的遥控器尺寸巨大,不适合单手操作。
技术实现要素:
3.本技术实施方式提供一种遥控器及遥控系统。
4.本技术实施方式的遥控器包括壳体、支架结构及操控结构。所述壳体包括握持部及弯折的安装部,所述安装部自所述握持部的顶部延伸。所述支架结构安装在所述壳体内并与所述壳体匹配。所述操控结构安装在所述支架结构和/或所述壳体上并从所述安装部露出,所述操控结构用于供用户握持所述握持部的同时能够进行操控,以控制无人机和/或云台。
5.在某些实施方式中,所述操控结构包括第一操控键,所述安装部的第一侧设置有第一通孔,所述第一操控键设置在所述支架结构的第一侧并从所述第一通孔中露出。
6.在某些实施方式中,所述第一操控键包括转动控制键,所述转动控制键用于控制所述云台转动。
7.在某些实施方式中,当施加推力朝远离所述握持部的方向推动所述转动控制键时,所述云台的俯仰轴电机朝第一方向转动;当施加拉力朝接近所述握持部的方向拉动所述转动控制键时,所述云台的俯仰轴电机朝第二方向转动,所述第一方向与所述第二方向相反;和/或当作用于所述转动控制键的所述推力或所述拉力消失时,所述转动控制键自动移回到初始位置;所述初始位置包括所述第一通孔的中间位置。
8.在某些实施方式中,所述第一操控键包括拍照/录像按键;其中:当按压所述拍照/录像按键的持续时长小于第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备拍照,当按压所述拍照/录像按键的持续时长大于所述第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备录像;或当按压所述拍照/录像按键的持续时长小于第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备录像,当按压所述拍照/录像按键的持续时长大于所述第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备拍照。
9.在某些实施方式中,所述操控结构包括扳机,所述安装部的第二侧设置有第二通孔,所述扳机设置在所述支架结构的第二侧并从所述第二通孔中伸出到所述壳体外,所述扳机用于控制所述无人机的油门档位,以控制所述无人机的电机的转速。
10.在某些实施方式中,所述扳机能够相对所述支架结构转动,所述扳机的转动力矩与转动角度成线性关系;和/或当所述扳机朝接近所述壳体内部的方向转动时,所述无人机的电机的转速增加,当所述扳机朝远离所述壳体内部的方向转动时,所述无人机的电机的
转速减小;或当所述扳机朝接近所述壳体内部的方向转动时,所述无人机的电机的转速减小,当所述扳机朝远离所述壳体内部的方向转动时,所述无人机的电机的转速增加。
11.在某些实施方式中,所述操控结构包括第二操控键,所述安装部的第三侧设置有第三通孔,所述第二操控键设置在所述安装部上并从所述第三通孔中露出。
12.在某些实施方式中,所述第二操控键包括加解锁结构,所述加解锁结构用于控制所述无人机的桨叶的锁定与解锁。
13.在某些实施方式中,所述加解锁结构能够在第一档位与第二档位之间切换,当所述加解锁结构处于所述第一档位时,所述无人机的桨叶被锁定而无法被驱动旋转或被解锁以能够被驱动旋转;当所述加解锁结构处于所述第二档位时,所述无人机的桨叶被解锁以能够被驱动旋转或被锁定而无法被驱动旋转。
14.在某些实施方式中,所述第一档位对应所述第三通孔的第一位置,所述第二档位对应所述第三通孔的第二位置,所述第二位置与所述第一位置不同。
15.在某些实施方式中,所述第二操控键包括电源开关按键,所述电源开关按键用于开启或关闭所述遥控器的电源。
16.在某些实施方式中,所述操控结构包括至少一个第三操控键,所述安装部的第四侧设置有至少一个第四通孔,所述第三操控键与所述第四通孔对应,所述第三操控键设置在所述安装部上并从对应的所述第四通孔中露出。
17.在某些实施方式中,所述第三操控键包括以下按键中的至少一种:
18.刹车按键,所述刹车按键用于控制所述无人机紧急悬停;
19.拍照/录像按键,当按压所述拍照/录像按键的持续时长小于第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备拍照,当按压所述拍照/录像按键的持续时长大于所述第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备录像,或当按压所述拍照/录像按键的持续时长小于第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备录像,当按压所述拍照/录像按键的持续时长大于所述第一预定时长时,所述拍照/录像按键用于控制所述无人机的拍摄设备拍照;
20.开关/模式切换按键,当按压所述开关/模式切换按键的持续时长小于第二预定时长时,所述开关/模式切换按键用于切换所述无人机的飞行模式,当按压所述开关/模式切换按键的持续时长大于所述第二预定时长时,所述开关/模式切换按键用于开启或关闭所述遥控器的电源;
21.模式切换按键,所述模式切换按键用于切换所述无人机的飞行模式;
22.电源开关按键,所述电源开关按键用于开启或关闭所述遥控器的电源;
23.加解锁按键,所述加解锁按键用于控制所述无人机的桨叶的锁定与解锁;及
24.加解锁结构,所述加解锁结构用于控制所述无人机的桨叶的锁定与解锁。
25.在某些实施方式中,所述第三操控键包括加解锁结构,所述加解锁结构能够在第一档位与第二档位之间切换,当所述加解锁结构处于所述第一档位时,所述无人机的桨叶被锁定而无法被驱动旋转或被解锁以能够被驱动旋转;当所述加解锁结构处于所述第二档位时,所述无人机的桨叶被解锁以能够被驱动旋转或被锁定而无法被驱动旋转。
26.在某些实施方式中,所述第三操控键包括加解锁按键,所述加解锁按键处于所述第一档位时,所述加解锁按键被压下;所述加解锁按键处于所述第二档位时,所述加解锁按
键复位;或者
27.通过按压开关进行所述第一档位与所述第二档位之间的切换,所述加解锁按键处于所述第一档位和所述第二档位时,所述加解锁按键的位置相同。
28.在某些实施方式中,所述安装部包括自所述握持部的第一侧延伸的延伸臂及自所述延伸臂延伸的弯折臂,所述延伸臂的延伸方向与所述握持部的延伸方向一致,并与所述弯折臂的延伸方向呈第一夹角。
29.在某些实施方式中,所述第一夹角的取值范围为[90
°
,180
°
]。
[0030]
在某些实施方式中,所述支架结构包括依次相接的第一支架、第二支架、及第三支架;所述第一支架与所述安装部匹配,所述第二支架与所述延伸臂匹配,所述第三支架与所述握持部匹配。
[0031]
在某些实施方式中,所述遥控器还包括第一电路板,所述第一电路板安装在所述第一支架的靠近所述弯折臂的顶部的一侧,所述第一电路板与天线单元电性连接。
[0032]
在某些实施方式中,所述遥控器还包括第二电路板,所述第二电路板安装在所述第二支架上,所述第二电路板能够搭载功能器件;所述功能器件包括如下至少一种:蜂鸣器、第一操控键的插座、扳机的插座、第二操控键的插座、及第三操控键的插座。
[0033]
在某些实施方式中,所述遥控器还包括第三电路板,所述第三电路板安装在所述第三支架上,所述第三电路板用于搭载主控制器。
[0034]
在某些实施方式中,所述支架结构由同一种材料制成;或所述支架结构由不同的材料制成。
[0035]
在某些实施方式中,所述第一支架、所述第二支架、及所述第三支架为一体结构;或所述第一支架、所述第二支架、及所述第三支架为分体结构,所述第一支架、所述第二支架、及所述第三支架依次固定连接形成所述支架结构;或所述第一支架、所述第二支架、及所述第三支架为分体结构,所述第一支架、所述第二支架、及所述第三支架依次能够拆卸地连接形成所述支架结构;或所述第一支架、所述第二支架、及所述第三支架中的任意两个为一体结构,并与剩余的一个固定连接;或所述第一支架、所述第二支架、及所述第三支架中的任意两个为一体结构,并与剩余的一个能够拆卸地连接;所述第一支架、所述第二支架、及所述第三支架中的任意两个固定连接,并与剩余的一个能够拆卸地连接。
[0036]
在某些实施方式中,所述壳体还包括第一壳及第二壳,所述第一壳与所述第二壳能够拆卸地连接以形成收容腔,所述支架结构收容在所述收容腔内。
[0037]
在某些实施方式中,所述操控结构的第一操控键收容在所述收容腔内并从所述第一壳的第一侧露出;和/或所述操控结构的扳机收容在所述收容腔内并从所述第一壳的第二侧露出;和/或所述操控结构的第二操控键收容在所述收容腔内并从所述第一壳的第三侧露出;和/或所述操控结构的第三操控键收容在所述收容腔内并从所述第二壳的第四侧露出。
[0038]
在某些实施方式中,所述第一壳的内壁设置有第一连接件,所述第二壳的内壁设置有第二连接件,所述第一连接件与所述第二连接件配合,以连接所述第一壳与所述第二壳。
[0039]
在某些实施方式中,所述第一壳的内壁设置有第一导引件,所述第二壳的内壁设置有第二导引件,所述第一导引件能够沿所述第二导引件移动,以导引所述第一壳与所述
第二壳的安装方向。
[0040]
在某些实施方式中,所述第一导引件包括多个,多个所述第一导引件对称分布在所述第一壳的内壁的两侧;所述第二导引件包括多个,多个所述第二导引件对称分布在所述第二壳的内壁的两侧。
[0041]
在某些实施方式中,所述第一导引件包括两个轨道,两个所述轨道之间形成滑槽,所述第二导引件包括导引柱,所述导引柱滑动收容在所述滑槽内或滑动包裹在两个所述轨道外侧;或所述第一导引件包括导引柱,所述第二导引件包括两个轨道,两个所述轨道之间形成滑槽,所述导引柱滑动收容在所述滑槽内或滑动包裹在两个所述轨道外侧。
[0042]
在某些实施方式中,所述第一壳的内壁设置有第一限定件,所述第二壳的内壁设置有第二限定件,所述第一限定件与所述第二限定件配合,以限定所述第一壳与所述第二壳的相对移动。
[0043]
在某些实施方式中,所述第一限定件包括多个,多个所述第一限定件对称分布在所述第一壳的内壁的两侧;所述第二限定件包括多个,多个所述第二限定件对称分布在所述第二壳的内壁的两侧。
[0044]
在某些实施方式中,所述第一壳每一侧的内壁上的第一导引件与第一限定件间隔交替设置;所述第二壳每一侧的内壁上的第二导引件与第二限定件间隔交替设置。
[0045]
在某些实施方式中,所述第一限定件包括卡合块,所述第二限定件包括开设有卡槽的限定柱,所述卡合块与所述卡槽匹配;或所述第一限定件包括开设有卡槽的限定柱,所述第二限定件包括卡合块,所述卡合块与所述卡槽匹配。
[0046]
在某些实施方式中,所述第二壳的内壁设置有第一结合件,所述支架结构上设置有第二结合件,所述第一结合件与所述第二结合件配合,以连接所述第二壳与所述支架结构。
[0047]
在某些实施方式中,所述第一壳的内壁设置有第一结合件,所述支架结构上设置有第二结合件,所述第一结合件与所述第二结合件配合,以连接所述第一壳与所述支架结构。
[0048]
在某些实施方式中,所述第一壳上的第一连接件与所述第一结合件至少部分为同一元件;与所述第一壳上的第一连接件为同一元件的所述第一结合件、与该第一结合件对应的第二结合件均与所述第二壳的底部的通槽对应。
[0049]
在某些实施方式中,所述遥控器还包括装饰件,所述装饰件能够拆卸地安装在所述第二壳上,所述装饰件上设置有第五通孔,所述操控结构的第三操控键自所述第五通孔穿出至所述第二壳外。
[0050]
在某些实施方式中,所述遥控器还包括天线单元及电路板,所述天线单元收容在所述收容腔内并位于所述第一支架的远离所述第二支架的一侧与所述第一壳的第二侧的内壁之间;所述第一电路板收容在所述收容腔内并安装在所述第一支架的靠近所述弯折臂的顶部的一侧,所述第一电路板与所述天线单元电性连接以与所述天线单元进行信号传输。
[0051]
在某些实施方式中,所述天线单元安装在所述第一壳上或安装在所述第一支架的远离所述第二支架的一侧。
[0052]
在某些实施方式中,所述天线单元包括天线电路板、设置在所述天线电路板上的
第一辐射体、及设置在所述天线电路板上的第二辐射体,所述第一辐射体与所述第二辐射体垂直相交;所述第一辐射体与所述第二辐射体位于所述天线电路板的靠近所述第一壳的第二侧的一侧。
[0053]
在某些实施方式中,所述第一支架包括连接子支架、第一子支架及第二子支架,所述连接子支架与所述第二支架相接;所述第一子支架与所述连接子支架倾斜连接;所述第二子支架安装在所述第一子支架上并与所述第一子支架共同形成收容空间,所述第一电路板安装在所述收容空间内;其中:所述第一子支架与所述第二子支架均为散热板;所述第一电路板与所述第一子支架之间填充有导热脂;和/或所述第一电路板与所述第二子支架之间填充有导热脂。
[0054]
在某些实施方式中,所述第一子支架的延伸方向与所述连接子支架的延伸方向呈第二夹角,所述第二夹角的取值范围为[90
°
,180
°
];所述第二夹角与第一夹角相同。
[0055]
在某些实施方式中,所述第一子支架包括第一本体,所述第二子支架包括第二本体,所述第一子支架与所述第二子支架中的任意一个还包括间隔件,所述间隔件位于所述第一本体与所述第二本体之间以间隔所述第一本体与所述第二本体。
[0056]
在某些实施方式中,当所述间隔件设置在所述第一本体上时,锁紧件穿过所述第二本体、所述第一电路板、及所述间隔件以将所述第二子支架与所述第一电路板一起固定在所述第一本体上;当所述间隔件设置在所述第二本体上时,锁紧件穿过所述第二本体、所述间隔件、所述第一电路板、及所述第二本体以将所述第二子支架与所述第一电路板一起固定在所述第一本体上。
[0057]
在某些实施方式中,所述遥控器还包括散热件,所述散热件设置在所述支架结构上,并与所述安装部的顶部间隔。
[0058]
在某些实施方式中,所述遥控器还包括散热件,所述散热件设置在所述第二本体的远离所述第一子支架的一侧并与所述安装部的顶部间隔。
[0059]
在某些实施方式中,所述散热件包括散热鳍片。
[0060]
在某些实施方式中,所述散热件的数量为多个,每个所述散热件的远离所述第二本体的端面设置有缺口,多个所述缺口对应并共同形成安装空间。
[0061]
在某些实施方式中,所述遥控器还包括检测器,所述检测器设置在所述安装空间内并通过柔性电路板与所述遥控器的第二电路板电性连接;所述检测器包括指南针、距离检测器、重力加速度计中的至少一个。
[0062]
在某些实施方式中,所述遥控器还包括第二电路板,所述第二电路板收容在所述收容腔内并安装在所述第二支架的靠近所述第二壳的第四侧,所述第二电路板用于与所述操控结构电性连接。
[0063]
在某些实施方式中,所述第二电路板能够搭载功能器件;所述功能器件包括如下至少一种:蜂鸣器、第一操控键的插座、扳机的插座、第二操控键的插座、及第三操控键的插座。
[0064]
在某些实施方式中,所述遥控器还包括第三电路板,所述第三电路板收容在所述收容腔内并安装在所述第三支架上,以与所述第二壳的第四侧的握持部对应;所述第三电路板用于搭载主控制器;所述第三电路板通过柔性线路板与所述遥控器的第一电路板电性连接;所述第三电路板与所述遥控器的第二电路板电性连接,以使得所述第三电路板上的
主控制器能够控制所述第二电路板上的功能器件。
[0065]
在某些实施方式中,所述遥控器还包括电源;所述第三支架包括第三支架本体及盖体,所述第三支架本体设置有收容仓;所述盖体安装在所述第三支架本体上并能够遮挡或开放所述收容仓,所述电源安装在所述收容仓内并被所述盖体遮挡。
[0066]
在某些实施方式中,所述第三电路板还用于搭载外接端子,所述外接端子用于电性连接所述电源与外界电力,和/或电性连接所述主控制器与外界终端。
[0067]
在某些实施方式中,所述盖体能够拆卸地安装在所述第三支架本体上;或所述盖体能够固定安装在所述第三支架本体上。
[0068]
在某些实施方式中,所述第三支架本体的第二侧设置所述收容仓,所述第三电路板设置在所述第三支架本体的第四侧的侧壁上或作为所述第三支架本体的第四侧的侧壁,所述第三支架本体的第二侧与所述第三支架本体的第四侧相背;或所述第三支架本体的第四侧设置所述收容仓,所述盖体为散热片,所述第三电路板设置在所述散热片上。
[0069]
在某些实施方式中,所述第二壳的对应所述握持部的第二侧设置有一侧贯穿的通槽,所述外接端子从所述通槽露出;所述遥控器还包括密封件,所述密封件活动安装在所述第二壳的通槽内,以选择性地密封或开放所述通槽。
[0070]
在某些实施方式中,所述密封件包括密封本体、设置在所述密封本体上的连接柱、及设置在所述密封本体上的定位块,所述连接柱自所述通槽伸入所述收容腔内并与所述第二壳的内壁连接,所述连接柱能够改变从所述第二壳伸出的长度;所述定位块与所述连接柱位于所述密封本体的同一侧,所述定位块用于与所述外接端子插接。
[0071]
本技术还提供一种用于控制无人机的遥控器,包括手持部分、在所述顶部的第一侧的第一控制组件、及在所述顶部的第二侧的第二控制组件。所述手持部分包括手持部分的顶部和所述手持部分的其余部分。所述第一控制组件被配置为用于控制所述无人机的云台和/或所述无人机的有效载荷。所述第二侧与所述第一侧相邻,所述第二控制组件被配置成控制所述无人机的运动。
[0072]
在某些实施方式中,所述顶部的第二侧包括所述顶部的后侧。
[0073]
在某些实施方式中,所述第一控制组件还被配置为控制所述云台的俯仰角。
[0074]
在某些实施方式中,所述遥控器还包括在所述第一侧的第三控制组件,该第三控制组件被配置为控制所述云台或所述有效载荷。
[0075]
在某些实施方式中,所述有效载荷包括成像装置。
[0076]
在某些实施方式中,所述有效载荷包括喷雾器。
[0077]
在某些实施方式中,所述有效载荷包括成像装置;所述第三控制组件是按钮。
[0078]
在某些实施方式中,所述第三控制组件还被配置为:当所述第三控制组件的按压和释放的持续时间短于预定持续时间阈值时,控制所述成像装置进行拍照;所述第三控制组件还被配置为:当所述第三控制组件的按下和释放的持续时间长于预定持续时间阈值时,控制所述成像装置进行视频拍摄。
[0079]
在某些实施方式中,所述第二控制组件还被配置为控制所述无人机的锁定和解锁。
[0080]
在某些实施方式中,所述遥控器还包括设置于所述后侧的第三控制组件,所述第三控制组件被配置为控制所述无人机的运动。
[0081]
在某些实施方式中,所述第三控制组件还被配置为控制所述无人机的飞行模式。
[0082]
在某些实施方式中,所述遥控器还包括设置于所述后侧的第三控制组件,所述第三控制组件被配置为控制无人机的运动。
[0083]
在某些实施方式中,所述第三控制部件还被配置为控制所述无人机的制动。
[0084]
在某些实施方式中,所述遥控器还包括设置于所述顶部的第二侧的第三控制组件。
[0085]
在某些实施方式中,所述无人机包括一个或多个马达;和所述第三控制组件被配置为控制一个或多个所述马达的转速。
[0086]
在某些实施方式中,所述手持部分的顶部从所述手持部分以第一角度延伸,所述顶部比所述手持部分的其余部分向前延伸。
[0087]
在某些实施方式中,所述第一角度为锐角。
[0088]
在某些实施方式中,所述遥控器还包括位于所述遥控器内部的主支架,其中:所述第一控制组件被配置为与布置在所述主支架上的一个或多个电路板电连接;所述第二控制组件被配置为与布置在所述主支架上的一个或多个电路板电连接。
[0089]
在某些实施方式中,所述遥控器还包括位于遥控器内部的主支架,其中:所述主支架包括设置在所述主支架上的一个或多个电子组件;所述主支架和放置在其上的一个或多个所述电子组件完全位于所述遥控器的内部空间内;所述主支架被配置为通过与第一角度一致地位于所述遥控器的内部空间中而形成所述第一角度。
[0090]
在某些实施方式中,所述遥控器还包括:
[0091]
从所述手持部分的顶部延伸的天线部分,所述天线部分比所述顶部以第二角度向前延伸;和
[0092]
容纳在所述天线部分中的天线。
[0093]
在某些实施方式中,所述天线通过布置在所述主支架上而被容纳在所述天线部分;所述主支架被配置为在所述天线后方留出空间,以减少从所述天线向后传输的信号损失。
[0094]
在某些实施方式中,所述天线有两个臂,两个所述臂呈x形。
[0095]
在某些实施方式中,两个所述臂相互垂直。
[0096]
在某些实施方式中,所述遥控器包括惯性测量单元(imu),所述惯性测量单元被配置为测量所述遥控器的姿态状态。
[0097]
在某些实施方式中,所述无人机的姿态状态根据所述遥控器的姿态状态而变化。
[0098]
在某些实施方式中,所述遥控器包括一个或多个控制模式;一个或多个所述控制模式包括默认模式;当所述遥控器处于所述默认模式时,所述无人机的姿势状态能够根据所述遥控器的姿势状态而变化。
[0099]
本技术还提供一种遥控器,包括手持部分、位于所述遥控器内部的支撑部分、和设置于所述手持部分的顶部上的一个或多个控制组件。所述手持部分的顶部以第一角度从所述手持部分延伸,所述顶部比所述手持部分的其余部分向前延伸。所述支撑部分包括设置在所述支撑部分上的一个或多个电子组件,至少部分的所述电子组件远离所述手持部分设置;所述支撑部分被配置为通过与第一角度一致地位于所述遥控器的内部空间中而容纳第一角度;所述控制组件被配置为控制无人机。
[0100]
在某些实施方式中,所述支撑部分包括第一支架部分和第二支架部分,所述支撑部分还被配置为通过包括以下结构来形成所述第一角度:
[0101]
位于所述手持部分的其余部分内的所述第一支架部分;和
[0102]
位于所述手持部分的顶部内部的所述第二支架部分。
[0103]
在某些实施方式中,所述第一支架部分以与所述手持部分的其余部分相同的长度延伸。
[0104]
在某些实施方式中,所述手持部分内部的第一支架部分上设置有电源。
[0105]
在某些实施方式中,所述支撑部分被配置为支撑电源,使所述电源不与所述遥控器的外壳直接接触。
[0106]
在某些实施方式中,所述第二支架部分设有电路板,所述支撑部分还被配置为支撑所述电路板,使所述电路板不与所述遥控器的外壳直接接触。
[0107]
在某些实施方式中,所述遥控器还包括位于所述支撑部分的散热结构。
[0108]
在某些实施方式中,所述遥控器还包括:
[0109]
从所述手持部分的顶部以第二角度延伸的天线部分,所述天线部分比所述顶部更向前延伸;和
[0110]
容纳在所述天线部分中的天线。
[0111]
在某些实施方式中,所述支撑部分包括第一支架部分、第二支架部分、和第三支架部分,所述支撑部分还被配置为通过包括以下结构来形成所述第一角度和所述第二角度:
[0112]
位于所述手持部分的其余部分内的所述第一支架部分;
[0113]
位于所述手持部分的顶部内部的所述第二支架部分;和
[0114]
位于所述天线部分内部的所述第三支架部分。
[0115]
在某些实施方式中,所述天线通过布置在所述第三支架部分上而被容纳在所述天线部分;所述支撑部分被配置为使支撑天线,使所述天线不与所述遥控器的外壳直接接触。
[0116]
在某些实施方式中,所述第三支架部分上设有电路板,所述支撑部分还被配置为支撑所述电路板,使所述电路板不与所述遥控器的外壳直接接触。
[0117]
在某些实施方式中,所述遥控器还包括散热结构,所述散热结构位于所述支撑部分。
[0118]
在某些实施方式中,所述散热结构还包括至少一个散热器;至少一个所述散热器不与所述手持部分的外壳接触。
[0119]
在某些实施方式中,所述支撑部分设有电路板并与所述散热器热连接;所述支撑部分被配置为支撑所述电路板,使所述电路板不与所述遥控器的外壳直接接触。
[0120]
在某些实施方式中,所述天线通过布置在所述支撑部分上而被容纳在所述天线部分中;所述支撑部分被配置为在所述天线后方留有空间,以减少从所述天线向后发送的信号的损失。
[0121]
在某些实施方式中,所述天线有两个臂,两个所述臂呈x形。
[0122]
在某些实施方式中,两个所述臂相互垂直。
[0123]
在某些实施方式中,其中一个或多个所述控制部件分别包括第一端和第二端,所述第一端设置在所述支撑部分,所述第二端通过与所述手持部分的顶部相对应的外壳部分暴露。
[0124]
在某些实施方式中,所述遥控器还包括容纳在所述天线部分中的指南针,其中一个或多个所述电子组件远离所述指南针,以减少对所述指南针的干扰。
[0125]
在某些实施方式中,所述支撑部分包括所述遥控器的外壳。
[0126]
在某些实施方式中,所述第一角度为锐角。
[0127]
在某些实施方式中,所述第一角度为锐角,所述第二角度为锐角。
[0128]
在某些实施方式中,所述遥控器包括惯性测量单元(imu),所述惯性测量单元被配置为测量所述遥控器的姿态信息。
[0129]
在某些实施方式中,所述遥控器包括一个或多额控制模式;一个或多个所述控制模式包括默认模式;当所述遥控器处于所述默认模式时,所述无人机的姿势状态能够根据所述遥控器的姿势状态而变化。
[0130]
在某些实施方式中,所述遥控器包括配置为测量所述遥控器的方向的指南针。
[0131]
在某些实施方式中,所述支撑部分和布置在所述支撑部分上的一个或多个所述电子组件完全位于所述遥控器的内部空间内。
[0132]
在某些实施方式中,所述支撑部分包括主支架。
[0133]
在某些实施方式中,所述遥控器还包括外壳部分,所述支撑部分构被配置为与所述外壳部分连接。
[0134]
在某些实施方式中,一个或多个所述电子组件分布在所述支撑部分的两个侧面。
[0135]
本技术还提供一种遥控器,包括手持部分、位于所述遥控器的第一侧的第一控制组件、和位于所述遥控器正面的第二控制组件。所述第一控制组件被配置为用于接收来自用户的拇指的输入。所述第二控制组件被配置为接收来自用户的食指的输入,所述第一控制组件与第二控制组件相邻。
[0136]
本技术还提供一种遥控系统,包括无人机和上述任一实施方式所述的遥控器,所述遥控器用于控制所述无人机。
[0137]
本技术还提供一种遥控系统,包括无人机、上述任一实施方式所述的遥控器、和带有显示器的头戴式设备。所述遥控器用于控制所述无人机。所述显示器被配置为显示由所述无人机捕获的一个或多个图像或视频。
[0138]
本技术的遥控器及遥控系统通过提供便于用户握持的壳体,并将支架结构收容在壳体内,并将操控结构集中从安装部处露出,用户在握持握持部的同时能够对集中从安装部露出的操控结构进行操控,以控制无人机和/或云台。一方面能降低遥控器的重量及尺寸;另一方面,握持部便于单手握持,单手操作,能够为用户提供良好握持及方便用户单手操作。
[0139]
本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
附图说明
[0140]
本技术的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
[0141]
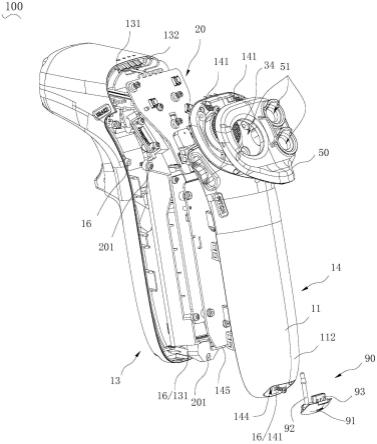
图1是本技术实施方式的遥控器一个视角的立体组装示意图;
[0142]
图2是本技术实施方式的遥控器另一视角的立体组装示意图;
[0143]
图3是本技术某些实施方式的遥控器一个视角的立体分解示意图;
[0144]
图4是本技术某些实施方式的遥控器另一视角的立体分解示意图;
[0145]
图5是本技术某些实施方式的遥控器的第一壳及加解锁结构的连接示意图;
[0146]
图6是本技术某些实施方式的遥控器的第二壳的结构示意图;
[0147]
图7是本技术某些实施方式的遥控器再一视角的立体分解示意图;
[0148]
图8是本技术某些实施方式的遥控器的支架结构的立体分解示意图;
[0149]
图9是本技术某些实施方式的遥控器的扳机组件一个视角的立体分解示意图;
[0150]
图10是本技术某些实施方式的遥控器的扳机组件另一视角的立体分解示意图;
[0151]
图11是本技术某些实施方式的遥控器的加解锁结构的部分立体分解示意图;
[0152]
图12是本技术某些实施方式的遥控器的加解锁结构处在第二档位的示意图;
[0153]
图13是图12中加解锁结构沿xiii-xiii的截面示意图;
[0154]
图14是图12中加解锁结构沿xiv-xiv的截面示意图;
[0155]
图15是本技术某些实施方式的遥控器的加解锁结构处在第一档位的示意图;
[0156]
图16是图15中加解锁结构沿xvi-xvi的截面示意图;
[0157]
图17是本技术某些实施方式的遥控器的加解锁结构的立体组装示意图;
[0158]
图18是本技术某些实施方式的遥控器一个视角的立体组装示意图;
[0159]
图19是本技术某些实施方式的遥控器另一视角的立体组装示意图;
[0160]
图20是图1中的遥控器控制的无人机及云台的结构示意图;
[0161]
图21是本技术某些实施方式的遥控系统的显示器的显示示意图;
[0162]
图22是本技术实施方式的一种遥控系统的结构示意图。
具体实施方式
[0163]
以下结合附图对本技术的实施方式作进一步说明。附图中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。
[0164]
另外,下面结合附图描述的本技术的实施方式是示例性的,仅用于解释本技术的实施方式,而不能理解为对本技术的限制。
[0165]
在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0166]
请参阅图1、图3及图20,本技术实施方式提供一种遥控器100。遥控器100包括壳体10、支架结构20及操控结构30。壳体10包括握持部11及弯折的安装部12。握持部11用于供用户握持,例如,单手握持;安装部12自握持部11的第一侧111延伸。握持部11具有合适的尺寸,用户可以用一只手握住遥控器100。当用户使用遥控器100时,这释放了用户的另一只手。在一些实施例中,安装部12从握持部11延伸。支架结构20安装在壳体10内并与壳体10匹配。操控结构30安装在支架结构20和/或壳体10上并从安装部12露出,操控结构30用于供用户在握持握持部11的同时能够进行操控,以控制无人机400和/或云台300,例如,用户单手握持握持部11时能够用该单手进行操作。
[0167]
遥控器100被配置为控制可移动设备。在一些实施例中,可移动设备可以是交通工具,例如汽车,机器人,玩具箱或无人驾驶飞机。在一些实施例中,遥控器100还被配置为控制可移动设备的一部分。例如,可移动设备可以是无人机,并且遥控器100可以被配置为控制无人机的云台。云台可以被配置为允许由云台携带的有效载荷绕一个或多个轴线旋转。遥控器100可以进一步被配置为控制有效载荷的旋转,包括调节有效载荷的俯仰角。
[0168]
在一些实施例中,遥控器100还被配置为控制可移动设备的有效载荷。在一些实施例中,有效载荷包括传感装置。与有效载荷相关联的传感设备可以包括用于收集或生成数据或信息的设备,例如勘测,跟踪和捕获目标(例如,物体,风景,照片或视频拍摄对象等)的图像或视频。感觉装置可以包括图像传感器,该图像传感器被配置为收集可以用于生成图像或视频的数据。在一些其他实施例中,有效载荷可以包括喷雾器。与有效载荷关联的喷雾器可以包括用于存储农药的设备和用于喷雾农药的设备。
[0169]
对于诸如使用遥控器100控制移动车辆的控制过程,优选的是,用户可以在控制时将他/她的眼睛从其他任务中解放出来并且注意移动车辆和环境。但是,在不看遥控器100的情况下使用遥控器 100会给用户带来挑战,要准确地知道遥控器100上控制组件的位置,尤其是在用户密切注意其他事物(例如运动中的车辆的运动和它的环境。因此考虑将控制组件或至少经常使用的控制组件的位置限制在遥控器100的特定部分。
[0170]
本技术实施方式中的遥控器100通过提供便于用户单手握持的壳体10,并且将支架结构20收容在壳体10内,并将操控结构30集中从安装部12处露出,用户在单手握持握持部11的同时能够用该单手对集中从安装部12露出的操控结构30进行操控,以控制无人机400和/或云台300。一方面能降低遥控器100的重量及尺寸;另一方面能够为用户提供良好握持及方便用户单手操作。
[0171]
请参阅图8至图10及图20,本技术实施方式还提供一种扳机组件320。扳机组件320包括支架结构20、扳机32及位置检测器328。扳机32的第一侧321转动连接在支架结构20上,扳机32 的第二侧322为自由侧。位置检测器328设置在支架结构20上并用于检测扳机32相对支架结构20 的转动角度,转动角度与无人机400的油门档位对应。其中,当扳机32被触发带动扳机32转动时,无人机400能够响应不同的转动角度以执行对应的油门档位。
[0172]
请结合图1,本技术实施方式还提供一种遥控器100。遥控器100包括壳体10及扳机组件320,扳机组件320与壳体10结合,扳机组件320的扳机32从壳体10内伸出。扳机组件320包括支架结构20、扳机32及位置检测器328。扳机32的第一侧321转动连接在支架结构20上,扳机32的第二侧322为自由侧。位置检测器328设置在支架结构20上并用于检测扳机32相对支架结构20 的转动角度,转动角度与无人机400的油门档位对应。其中,当扳机32被触发带动扳机32转动时,无人机400能够响应不同的转动角度以执行对应的油门档位。
[0173]
本技术遥控器100及扳机组件320根据可转动的扳机32的转动角度与无人机400的油门档位对应,并且无人机400能够响应不同的转动角度以执行对应的油门档位。如此用户能够通过操控扳机32即可实现遥控器100对无人机400的油门的操控,简单方便,且控制精准。
[0174]
请继续参阅图8至图10及图20,本技术实施方式还提供一种扳机组件320。扳机组件320包括支架结构20、扳机32、及弹性件327。支架结构20包括连接轴21251及安装臂2123。扳机32 与连接轴21251转动连接,扳机32包括相背的第一侧侧321与第二侧侧322,扳机32
的第二侧322 为自由侧。弹性件327的第一侧3271与安装臂2123结合,弹性件327第二侧3272与扳机32的第一侧321结合;当扳机32受力被触发绕连接轴21251朝第一方向转动时,弹性件327被拉长;当扳机32解除或减小受力时,弹性件327带动扳机32绕连接轴21251朝第二方向转动,第一方向与第二方向相反。
[0175]
请结合图1,本技术实施方式还提供一种遥控器100。遥控器100包括壳体10及扳机组件320,扳机组件320安装在壳体10上。扳机组件320包括支架结构20、扳机32、及弹性件327。扳机组件320的扳机32从壳体10内伸出。支架结构20包括连接轴21251及安装臂2123。扳机32与连接轴21251转动连接,扳机32包括相背的第一侧321与第二侧322,扳机32的第二侧322为自由侧。弹性件327的第一侧3271与安装臂2123结合,弹性件327第二侧3272与扳机32的第一侧321结合;当扳机32受力被触发绕连接轴21251朝第一方向转动时,弹性件327被拉长;当扳机32解除或减小受力时,弹性件327带动扳机32绕连接轴21251朝第二方向转动,第一方向与第二方向相反。
[0176]
本技术遥控器100及扳机组件320通过在支架结构20及扳机32之间设置弹性件327,以使扳机32自由侧的转动方向与弹性件327形变方向相反,无支点磨损等问题,能够提高弹性件327的使用寿命,从而延长遥控器100的使用寿命。
[0177]
请参阅图11及图20,本技术实施方式还提供一种加解锁结构330。加解锁结构330包括加解锁支架331、弹性部件332及拨动部件334。弹性部件332安装于加解锁支架331并与加解锁支架 331共同形成容纳腔333。拨动部件334安装在加解锁支架331上,拨动部件334至少部分收容在容纳腔333内。拨动部件334能够相对加解锁支架331转动而在第一档位与第二档位之间切换,以选择地对无人机400的桨叶401进行锁定与解锁。其中,拨动部件334在第一档位与第二档位支架切换时,拨动部件334经过一过渡档位。在过渡档位时,弹性部件332与拨动部件334相抵触,以使拨动部件334能够切换到第一档位或第二档位。无人机400的桨叶401进行锁定,无人机400的转子叶片组件将被阻止旋转。无人机400的桨叶401进行解锁,无人机400的转子叶片组件将被允许旋转。
[0178]
请结合图1,本技术实施方式还提供一种遥控器100。遥控器100包括壳体10及加解锁结构330。加解锁结构330与壳体10结合,加解锁结构330的拨动部件334从壳体10内伸出。加解锁结构330 包括加解锁支架331、弹性部件332及拨动部件334。弹性部件332安装于加解锁支架331并与加解锁支架331共同形成容纳腔333。拨动部件334安装在加解锁支架331上,拨动部件334至少部分收容在容纳腔333内。拨动部件334能够相对加解锁支架331转动而在第一档位与第二档位之间切换,以选择地对无人机400的桨叶401进行锁定与解锁。其中,拨动部件334在第一档位与第二档位支架切换时,拨动部件334经过一过渡档位。在过渡档位时,弹性部件332与拨动部件334相抵触,以使拨动部件334能够切换到第一档位或第二档位。
[0179]
本技术遥控器100及加解锁结构330通过增加过渡档位,在过渡档位时,弹性部件332与拨动部件334相抵触,以使拨动部件334能够切换到第一档位或第二档位。如此能够避免用户误操作,影响无人机400的桨叶401正常加锁与解锁。
[0180]
下面结合附图作进一步说明。
[0181]
请参阅图1、图7及图8,遥控器100包括壳体10、支架结构20、操控结构30、第一电路板 41、第二电路板42、第三电路板43、第四电路板44、电源45、装饰件50、天线单元60、散热
件 70、检测器80及密封件90。
[0182]
具体地,壳体10包括握持部11及弯折的安装部12。握持部11用于供用户单手握持,握持部 11包括相背设置的第一侧111及第二侧112,安装部12自握持部11的第一侧111延伸。安装部12 包括自握持部11的第一侧111延伸的延伸臂125及自延伸臂125延伸的弯折臂126,延伸臂125的延伸方向与握持部11的延伸方向一致,并与弯折臂126的延伸方向呈第一夹角α。
[0183]
在一些实施例中,第一夹角α的取值范围为[90
°
,180
°
]。例如,第一夹角α可以为90
°
、95
°
、 105.2
°
、110.7
°
、126
°
、138.1
°
、145
°
、152.3
°
、176
°
、180中的任意一个或任意相邻数值之间的任意值。若第一夹角α小于90
°
,即延伸臂125的延伸方向与弯折臂126的延伸方向之间的夹角小于90
°
,则会导致弯折臂126与握持部121之间的间距较小,不利于用户单手握持握持部121。本技术中的第一夹角α的取值范围为[90
°
,180
°
],能够使弯折臂126与握持部121之间的间距控制在适当范围,有利于用户单手握持握持部121,增加用户使用遥控器100的舒适感。
[0184]
请参阅图1及图2,安装部12包括依次相连的第一侧121、第二侧122、第三侧123及第四侧 124,安装部12的第一侧121设置有贯穿的第一通孔1211;安装部12的第二侧122设置有贯穿的第二通孔1221;安装部12的第三侧123设置有贯穿的第三通孔1231;安装部12的第四侧124设置有至少一个贯穿的第四通孔1241。第一通孔1211、第二通孔1221、第三通孔1231及第四通孔 1241均用于将设置在壳体10和/或设置在支架结构20上的操控结构30从壳体10中露出,以供用户操作操控结构30,从而控制无人机400和/或云台300。
[0185]
在一些实施例中,还可以将上述第一侧121、第二侧122、第三侧123及第四侧124分别称为第一侧面,背面,第二侧面、正面。其中,安装部的朝向正面。第二侧面与第一侧面相对。背面与正面相对。背面与第一侧面相邻。在一些实施例中,遥控器100的一个或多个侧面可以包括弯曲的形状。例如,背面的至少一部分包括与第一侧面连接的弯曲形状,而不是具有与第一侧面连接的尖锐边缘。这可以使遥控器100对于用户来说更舒适。遥控器100被配置为由用户的右手握持和操作。可以构造根据本公开的镜像配置以提供适合于由用户的左手握住和操作的遥控器。例如,关于遥控器100的第一侧面的适合于用右手握持的配置。前述实施例还可以是相对于第二侧面的,适合于用左手握住的控制器的结构。如前述实施例所描述的,以及适于适合由右手握住的控制器的第二侧面的构造。前述实施例中的第一实施例可以是关于适合于用左手握住的控制器的相对于第一侧面的构造。
[0186]
请参阅图3,壳体10还包括第一壳13及第二壳14。第一壳13与第二壳14能够拆卸地连接以形成收容腔15。
[0187]
具体地,请参阅图2及图3,第一壳13及第二壳14均包括部分握持部11及部分安装部12。其中,第一通孔1211可开设在第二壳14上的安装部12的第一侧121;第二通孔1221可开设在第一壳13上的安装部12的第二侧122;第三通孔1231可开设在第一壳13上的安装部12的第三侧 123;第四通孔1241可开设在第二壳14上的安装部12的第四侧124。当然,在其他实施例中,第一通孔1211也可以开设在第一壳13上的安装部12的第一侧121上,第三通孔1231可开设在第二壳14上的安装部12的第三侧123,在此不作限制。
[0188]
请参阅图3及图4,第一壳13的内壁130可设置有第一连接件131,对应地,第二壳14的内壁140可设置有与第一连接件131对应的第二连接件141。第一连接件131及第二连接件
141配合,以连接第一壳13及第二壳14。具体地,在一些实施例中,第一连接件131包括带有螺纹孔的凸柱,第二连接件141包括贯穿孔及锁紧件。锁紧件穿过贯穿孔并锁紧在凸柱的螺纹孔中,以将第一壳10 与第二壳14可拆卸地连接。如此,能够轻易打开壳体10更换其中损坏的元器件及电源45,降低遥控器100的维修难度以延长遥控器100的使用寿命。
[0189]
请继续参阅图3及图4,在一些实施例中,第一壳13的内壁130可设置有第一导引件132,对应地,第二壳14的内壁140可设置有与第一导引件132对应的第二导引件142,第一导引件132能够沿第二导引件142移动,以导引第一壳13与第二壳14的安装方向。第一导引件132与第二导引件142的导引配合,有利于第一壳13顺利地与第二壳14配合安装。
[0190]
示例地,在一个例子中,如图3及图4所示,第一导引件132可包括两个轨道1321,两个轨道 1231之间形成滑槽1232,对应地,第二导引件142可包括导引柱1421。导引柱142能够滑动收容在滑槽1232内,即导引柱142能够在两个轨道1321形成的滑槽1232内滑动。当然,导引柱1421 也可以滑动包裹在两个轨道1231外侧,仅需要保证第一导引件132能够沿第二导引件142移动即可,在此不作限制。
[0191]
在另一个例子中,如图5及图6所示,第一导引件132可包括导引柱1323,对应地,第二导引件142可包括两个轨道1422,两个轨道1422之间形成滑槽1423。导引柱1323能够滑动收容在滑槽1423内,即导引柱1323能够在两个轨道1422形成的滑槽1232内滑动。当然,导引柱1323也可以滑动包裹在两个轨道1422外侧,仅需要保证第一导引件132能够沿第二导引件142移动即可,在此不作限制。
[0192]
在一些实施例中,第一导引件132可包括多个,例如第一导引件132的数量可以是2个、4个、 6个、8个甚至更多个,多个第一导引件132可对称分布在第一壳13的内壁130的两侧。同样地,第二导引件142也可包括多个,例如第二导引件142的数量可以是2个、4个、6个、8个甚至更多个,多个第二导引件142可对称分布在第二壳14的内壁140的两侧。如此,在安装第一壳13及第二壳14时,仅需要将第一壳13一侧的第一导引件132与第二壳14对应的第二导引件142对齐之后,则第一壳13另一侧的第一导引件132就能够与第二壳14对应的第二导引件142自动对齐,如此能够提升用户组装第一壳13及第二壳14的速度,降低组装第一壳13及第二壳14的难度。请继续参阅图3及图4,在一些实施例中,第一壳13的内壁130上还设置有第一限定件133,对应地,第二壳14的内壁140上还设置有与第一限定件133对应的第二限定件143。第一限定件133与第二限定件143配合,以限定第一壳13与第二壳14的相对移动,完成第一壳13与第二壳14的固定连接,第一限定件133与第二限定件143配合可使得在使用遥控器100时,避免第一壳13或第二壳 14轻易打开,影响遥控器100的正常使用。
[0193]
示例地,在一个例子中,第一限定件133可包括卡合块1331,第二限定件143可包括开设有卡槽1433的限定柱1431,卡合块1331与卡槽1433匹配。也即是说,当第一壳13与第二壳14安装在一起后,卡合块1331与卡槽1433卡合,以使第一壳13与第二壳14不能够相对移动。
[0194]
在另一个例子中,如图5及图6所示,第一限定件133包括开设有卡槽1333的限定柱1331,第二限定件143包括卡合块1432,卡合块1432与卡槽1333匹配。也即是说,当第一壳13与第二壳14安装在一起后,卡合块1432与卡槽1333卡合,以使第一壳13与第二壳14不能够相对移动。
[0195]
在一些实施例中,第一限定件133可包括多个,例如第一限定件133的数量可以是2
个、4个、 6个、8个甚至更多个,多个第一限定件133对称分布在第一壳13的内壁130的两侧。同样地,第二限定件143也可包括多个,例如第二限定件143的数量可以是2个、4个、6个、8个甚至更多个,多个第二限定件143对称分布在第二壳14的内壁140的两侧。由于第一限定件133及第二限定件 143分别对称分布在第一壳13的内壁130及第二壳14的内壁140的两侧,能够使第一壳13及第二壳14两侧都不能够轻易发生移动,从而使第一壳13与第二壳14连接得更加牢固。
[0196]
在一些实施例中,请参阅图3及图4,在第一壳13的每一侧的内壁130上的第一导引件132与第一限定件133间隔交替设置。同样地,在第二壳14的每一侧的内壁140上的第二导引件142与第二限定件143也是间隔交替设置。如此,在第一壳13与第二壳14安装完成后,避免第一导引132 在第二导引件142内移动导致第一壳13与第二壳14之间产生缝隙,以此避免灰尘等杂质进入遥控器100的内部,从而延长遥控器100的使用寿命。
[0197]
请参阅图7,第二壳14对应握持部11的第二侧112还设置有通槽144,外接端子145从通槽 144露出。外接装置(图未示)可以通过从通槽144中露出的外接端子145与遥控器100内部的元器件连接。示例地,外接装置能够通过外接端子145与遥控器100内部设置的电源45电连接,以为电源45提供电能。当然,外接装置还可以通过外接端子145与遥控器100内部的其他元器件连接,以实现外接装置与遥控器100内部元器件的数据信息交互,在此不作限制。
[0198]
请继续参阅图7,在某些实施方式中,壳体10还可设置有第一结合件16,第一结合件16用于连接支架结构20及壳体10。第一结合件16可以设置在第一壳13的内壁130或第二壳14的内壁 140中的至少一个上。例如,第一结合件16可以设置在第一壳13的内壁130上,以连接第一壳13 及支架结构20;或者,第一结合件16也可以设置在第二壳14的内壁140上,以连接第二壳14及支架结构20;或者,第一结合件16可以设置在第一壳13的内壁130及第二壳14的内壁140上,以连接壳体10及支架结构20,在此不作限制。
[0199]
需要说明的是,在一些实施例中,第一壳13上的第一连接件131与第一结合件16至少部分为同一元件。第一壳13上不与第一结合件16为同一元件的第一连接件131仅用于与第二壳14上的第二连接件141配合,以连接第一壳13及第二壳14。第一壳13上与第一结合件16为同一元件的第一连接件131不仅用于与第二壳14上的第二连接件141配合,以连接第一壳13及第二壳14,还用于连接壳体10与支架结构20。具体地,第二壳14的通槽144的一侧上开设有第二连接件141,与第一壳13上的第一连接件131为同一元件的第一结合件16与设置在通槽144上的第二连接件141 对应,锁紧件依次穿过第二连接件141及支架结构20后锁紧在与第一结合件16为同一元件的第一连接件131上。如此,锁紧件能够同时连接第一壳13、支架结构20及第二壳14,从而能够避免支架结构20在第一壳13及第二壳14形成的收容腔15内相对移动。
[0200]
请参阅图7,支架结构20安装在壳体10的收容腔15内并与壳体10匹配。具体地,支架结构 20上设置有第二结合件201,第二结合件201与壳体10上设置的第一结合件16相互配合,以连接壳体10及支架结构20。支架结构20上设置第二结合件201的位置与壳体10上设置第一结合件16 的位置相对应。
[0201]
在一些实施例中,支架结构20具有与遥控器100配合的形状,使得支架结构20完全位于遥控器100的内部空间内。因此,支架结构20和布置在支架结构20上的组件可以更充分
地利用内部空间。
[0202]
在一些实施例中,支架结构20可以仅在支架结构20的某些位置处直接或间接地与壳体10接触,而支架结构20的大部分不与壳体10接触。这是有利的,因为产生的热量设置在支架结构20 上的电子部件的“热”不会直接消散到壳体10,从而对于用户握持遥控器而言,壳体10上的温度可能是更优选的。例如,支架结构20通过少数接触件与壳体10相接触,从而减少热量向壳体10传导。支架结构20设置有第二结合件201,第二结合件201与壳体10上设置的第一结合件16相互配合,以连接壳体10及支架结构20。
[0203]
请参阅图1及图3,支架结构20包括依次相接的第一支架21、第二支架22及第三支架23。其中,第一支架21与安装部12匹配,第二支架22与延伸臂125匹配,第三支架23与握持部11匹配。
[0204]
在一些实施例中,第一支架21、第二支架22及第三支架23为一体结构,使得支架结构20的集成度高,连接牢固,无需考虑拆装问题。在一些实施例中,第一支架21、第二支架22及第三支架23为分体结构。例如,第一支架21、第二支架22及第三支架23依次固定连接形成支架结构20,如此能够将各个支架上搭载的功能器件组装完成后形成分别包含第一支架21、第二支架22及第三支架23的三个模块,再将三个模块依次固定连接,模块化组装能够降低遥控器100整体的组装难度;或者,第一支架21、第二支架22及第三支架23依次能够拆卸地连接形成支架结构20,如此有利于维修及替换其中的任意一个支架,从而延长遥控器100的使用寿命。当然,在一些实施例中,支架结构20可以是第一支架21、第二支架22及第三支架23中的任意两个为一体结构,并与剩余的一个固定连接;或者,支架结构20也可以是第一支架21、第二支架22及第三支架23中的任意两个为一体结构,并与剩余的一个能够拆卸地连接;或者,支架结构20还可以是第一支架21、第二支架22及第三支架23中的任意两个固定连接,并与剩余的一个能够拆卸地连接,在此不作限制。
[0205]
请参阅图8,第一支架21可包括连接子支架211、第一子支架212及第二子支架213。其中,第一子支架212、第二子支架213通过连接子支架211与第二支架22连接。
[0206]
具体地,第一子支架212与连接子支架211倾斜连接,并与连接子支架211围成活动空间2111。在一些实施例中,第一子支架212的延伸方向与连接子支架211的延伸方向呈第二夹角β,第二夹角β的取值范围为[90
°
,180
°
],例如,第二夹角β可以为90
°
、95
°
、105.2
°
、110.7
°
、126
°
、138.1
°
、 145
°
、152.3
°
、176
°
、180中的任意一个或任意相邻数值之间的任意值。在一些实施例中,第二夹角β与第一夹角α相同,即第一子支架212的延伸方向与连接子支架211的延伸方向的夹角,与延伸臂125的延伸方向与弯折臂126的延伸方向之间的夹角相等。如此,能够使支架结构20与壳体10 更加匹配,便于将支架结构20收容在壳体10内。
[0207]
请参阅图8至图10,第一子支架212包括第一本体2121、间隔件2122、安装臂2123及连接部件2125。间隔件2122及安装臂2123均设置在第一本体2121上,且安装臂2123围成容置空间2124。连接部件2125穿设并固定在安装臂2123上。
[0208]
具体地,请参阅图9及图10,安装臂2123与连接子支架211安装在第一本体2121的同一侧。安装臂2123上设置有第一套接件21236,并且安装臂2123包括依次相接并围成容置空间2124的第一子臂21231、第二子臂21232、第三子臂21233及第四子臂21234。第三子臂21233相较于第四子臂21234更靠近连接子支架211。示例地,第一子臂21231与第二子臂21232间隔相对,第二子臂 21232能够拆卸地设置在第一本体2121上(包括直接设置在第一
本体2121上和间接设置在第一本体2121上)。第三子臂21233与连接子支架211相对,第三子臂21233的一侧与第一子臂21231 相接。第四子臂21234与第三子臂21233间隔相对,且第四子臂21234的一侧与第一子臂21231相接,第二子臂21232能够拆卸地安装在第三子臂21233的另一侧及第四子臂21234的另一侧,第四子臂21234上还可设置有走线孔21235。
[0209]
连接部件2125穿设并固定在第一子臂21231与第二子臂21232上。具体地,连接部件2125包括连接轴21251、第一轴套21254及第二轴套21255。连接轴21251包括相背的第一侧21252及第二侧21253。第一轴套21254可由用聚甲醛树脂(polyformaldehyde,pom)材料制成,第二轴套21255 也可由pom材料制成,连接轴21251的第一侧21252相对于连接轴21251的第二侧21253更靠近第一子臂21231。第一轴套21254套设在连接轴21251的第一侧21252,第二轴套21255套设在连接轴21251的第二侧21253。也即是说,连接轴21251的第一侧21252通过第一轴套21254转动连接在第一子臂21231上,连接轴21251的第二侧21253通过第二轴套21255转动连接在第二子臂 21232上。由于连接轴21251的与第一子臂21231及第二子臂21232连接的两侧均套设了轴套,一方面,第一轴套21254的设置能够减少连接轴21251与第一子臂21231之间的间隙,第二轴套21255 的设置能够减少连接轴21251与第二子臂21232之间的间隙,使得连接轴21251相对安装臂2123 的转动无晃动,转动精度高。另一方面,传统的连接部件会采用轴承与其他装置连接,本技术实施方式中的连接部件2125省略轴承,而采用第一轴套21254及第二轴套21255分别与第一子臂21231 及第二子臂21232连接,节省了成本。再一方面,有些设计为了减少成本而省略轴承,而将连接轴直接与安装臂连接,此时为了防止在连接轴21251相对安装臂2123的转动过程中发生晃动,会使得连接轴21251与第一子臂21231及第二子臂21232之间的阻尼都较大,本技术采用第一轴套21254 及第二轴套21255分别与第一子臂21231及第二子臂21232连接,能够减少连接轴21251与第一子臂21231及第二子臂21232之间的阻尼,有利于连接轴21251在连接臂2123上的转动无晃动。
[0210]
请参阅图8,第二子支架213安装在第一子支架212上并与第一子支架212共同形成收容空间 214。第二子支架213包括第二本体2131,间隔件2122位于第一子支架212的第一本体2121与第二本体2131之间,以间隔第一本体2121与第二本体2131。当然,间隔件2122也可以设置在第二子支架213上;或者,第一子支架212与第二子支架213上均设置有间隔件2122,换言之,间隔件 2122可以设置在第一本体2121与第二本体2131中的任意一个上,在此不作限制。
[0211]
请继续参阅图8,第三支架23包括第三支架本体231及盖体232。第三支架本体231设置有收容仓2315;盖体232安装在第三支架本体231上并遮挡收容仓2315。示例地,第三支架本体231 包括依次相连的第一侧2311、第二侧2312、第三侧2313及第四侧2314,其中第三支架本体231的第二侧2312与第三支架本体231的第四侧2314相背设置,并且第二侧2312相较于第四侧2314更靠近第二支架212。收容仓2315设置在第三支架本体231的第二侧2312。当然,在一些实施例中,收容仓2315设置在第三支架本体231的第四侧2314,此时遮盖收容仓2315的盖体232为散热片。如此能够为收容在收容仓2315内的元器件散热,以降低遥控器100的温度。
[0212]
在一些实施例中,遥控器100包括支架结构20,遥控器100的各种部件和子结构可以布置在支架20上。支架结构20直接或间接地固定到遥控器100的壳体10。支架结构20基本
上位于壳体10 内,使得布置在支架结构20上的遥控器100的部件和子结构可以完全布置在遥控器100的内部空间中。这对于小型遥控器特别有利,因为有效利用内部空间可使小型遥控器具有更多组件。
[0213]
与支架结构20有关的公开实施例的应用并不一定限于本文中相对于附图和/或示例所阐述和/ 或示出的遥控器100的部件的构造细节和布置。所公开的实施例能够变化,或者能够以各种方式被实践或执行。例如,壳体10可以用作或部分用作支架结构20,使得遥控器100的组件和子结构可以设置在壳体10上。在一些实施例中,遥控器100不包括支架结构20,而壳体10用作支架。例如,遥控器100的天线和电路板可以布置在壳体10的内侧130和140上。天线可以布置在壳体10的正面部分的内侧202的顶部前端上。电路板可以设置在壳体10的第二侧(后侧)部分的内侧上。作为另一示例,遥控器100的天线和控制部件可以直接设置在壳体10的外侧上,并通过设置在壳体 10上的连接电路与壳体10内部的电路板连接。
[0214]
可以理解,第一支架21、第二支架22及第三支架23越长,可以在支架结构20上放置的部件越多,因此可以使用遥控器100更多内部空间。在一些实施例中,第三支架23在握持部11的内部空间中延伸的长度尽可能长,以便更充分地利用遥控器100的内部空间。在一些其他实施例中,第三支架23以与握持部11长度方向相同的方向延伸,使得第三支架23和设置在第三支架23上的组件完全位于握持部11的内部空间内。例如,设置在第三支架23上的组件位于整个第三支架23上,并使用内部空间的各个部分在另一实施例中,握持部11的部分被使用,从而实现了遥控器100的内部空间的更充分利用。电源45具有与第三支架23相同的长度或几乎相同的长度,并且被布置在第三支架23上。第三电路板43也被布置在托架上以进一步实现该部分的内部空间的更充分利用。应该理解,所公开的实施例的应用并不一定限于在以下描述中阐述和/或在附图和/或示例中示出的部件的构造细节和布置。所公开的实施例能够变化,或者能够以各种方式被实践或执行。例如,当布置在第三支架23上的部件完全位于握持部11的内部空间内时,这并不限制布置在第三支架23 上的部件占据握持部11的内部空间的100%。布置在第三支架23(或当壳体10用作第三支架23 时是壳体10)上的部件,使得大部分内部空间可被组件有效地占据而不是空的。这提供了如下优点:由于有效利用了其内部空间,因此可以将遥控器100设计为更小。这也并不限制将遥控器100的电气部件仅布置在支架结构20上。未布置在支架结构20上的部件可以布置在遥控器100的其他位置,并且可以与布置在遥控器200上的一个或多个电路板电连接。例如,天线可以设置在壳体10的外部,并通过一个或多个电路与设置在支架结构20上的一个或多个电路板和遥控器100的其他电子部件电连接。
[0215]
类似地,在一些实施例中,支架结构20(或称支撑部分20)在顶部的内部空间中允许的长度上延伸,以更充分地利用遥控器100的内部空间。在一些实施例中,支撑部分20和设置在其上的部件完全位于的内部空间中。在一些实施例中,第一支架21在天线部分的内部空间中允许的长度上延伸以充分利用遥控器100的内部空间。在一些实施例中,第一支架21和布置在第一支架21上的组件完全位于天线部分的内部空间内。在一些实施例中,支架结构20和布置在支架结构20上的组件完全位于遥控器100的内部空间内。
[0216]
在一些实施例中,支架结构20被配置为使遥控器100的电路板不与壳体10直接接触。参照图 4,在一些实施例中,第三电路板43设置在第三支架23上。在一些实施例中,电路板设置在支撑部分20上。在一些实施例中,第一电路板41设置在第一支架21上。
[0217]
因为第一支架21、第二支架22及第三支架23中,第一支架21最远离握持部11,所以可能一个或多个主热源设置在第一支架21上,从而在使用过程中用户不会感觉到过多的热量,从而增强了用户体验。当使用遥控器100时,天线通常是主要的热源。因此,不仅由于与热相关的用户体验,而且由于将天线设置在遥控器100的前面可以帮助减少由于被其他部件的阻塞而导致的天线信号损失,因此可能期望将天线单元60收容在收容腔15内并位于第一支架21的远离第二支架23的一端与第一壳13的第二侧122的内壁之间。因此,也可能需要将散热部件布置在第一支架21上。包括一个或多个散热部件的散热件70设置在第一支架21上。在一些实施例中,散热件70包括至少一个散热器。在一些实施例中,散热件70包括一个或多个热传递部件,以将热量从第一支架21和/ 或第二支架22传递至第一支架21处的散热部件。
[0218]
如果除了天线之外,还有一些电子组件是遥控器100的主要热源,则可能希望将这些电子组件放置成远离握持部设置。例如,远离握持部11,靠近散热件70。在一些实施例中,第一电路板41 通过散热件70与至少一个散热器热连接。
[0219]
需要说明的是,在一些实施例中,盖体232能够拆卸地安装在第三支架本体231上;盖体232 也能够固定安装在第三支架本体231上,在此不作限制。
[0220]
在一些实施例中,支架结构20可由同一种材料制成,例如支架结构20可由金属材料制成,即,第一支架21、第二支架22及第三支架23均由金属材料制成,由于支架结构20由金属材料制成,能够加快遥控器100内的散热速度,避免遥控器100内温度过高;或者支架结构20可以均由合金材料制成,如此在加快遥控器100散热速度的同时还能够降低遥控器100的制造成本;或者支架结构20可以均由碳管制成,如此在加快遥控器100散热速度的同时还能减小支架结构20的重量,以减小遥控器100的重量。在一些实施例中,支架结构20可以由不同材料制成,例如,第一子支架 212可由金属材料、合金材料或碳管等高导热材料制成;第二子支架213可由金属材料、合金材料或碳管等高导热材料制成;第二支架22可由金属材料、合金材料或碳管等高导热材料制成;第三支架23可由金属材料、合金材料或碳管等高导热材料制成,连接子支架211由不导热的塑料制成。由于连接子支架211不导热,第一子支架212及第二子支架213上搭载的元器件工作时产生的热量不能够传递到与第三支架23匹配的握持部11,能够降低供握持的握持部11的温度,从而提升用户使用遥控器100的舒适度。需要说明的是,金属包括但不限于铜、铁、铝、镁等。合金包括但不限于铜合金、铁合金、铝合金、镁合金等。
[0221]
请参阅图1及图2,操控结构30安装在支架结构20和/或壳体10上并从安装部12露出。操控结构30用于供用户在单手握持握持部11的同时能够用该单手进行操控,以控制无人机400和/或云台300。操控结构30可以是按钮,开关,触发器,操纵杆,并且被配置为使用户能够用手指通过遥控器100的第二端发送用户命令,而不必注视遥控器100。操控结构30的第一端连接到第二支架 22,第二端为触发器主体,触发器主体通过壳体10中的孔暴露,使得用户可以通过操作通过壳体 10暴露的触发器主体来操作操控结构30。
[0222]
操控结构30可包括第一操控键31、扳机32、第二操控键33及第三操控键34中的至少一种。本技术以操控结构30同时包括第一操控键31、扳机32、第二操控键33及第三操控键34为例进行说明,操控结构30的其他情形以此类推,均属于本技术保护的范围。第一操控键31、扳机32、第二操控键33及第三操控键34均设置在第一壳10及第二壳20形成的收容腔15
内,第一操控键31 从第二壳14的第一侧121露出;扳机32从第一壳14的第二侧122露出;第二操控键33从第一壳 13的第三侧123露出;第三操控键34从第二壳14的第四侧124露出。示例地,第一操控键31设置在壳体10的安装部12第一侧121,并从第一通孔1211露出;扳机32设置在支架结构20的第二侧,并从第二通孔1221中伸出到壳体10外;第二操控键33设置在壳体10的安装部12的第三侧 123,并从对应的第三通孔1231中露出;第三操控键34设置在壳体10的安装部12的第四侧124,并从对应的第四通孔1241露出。当然,在一些实施例中,第一操控键31也可以从第一壳13的第一侧121露出,第二操控键33可从第二壳14的第三侧123露出;第一操控键31也可以设置在支架结构20上并从第一通孔1211露出,第二操控键33也可以设置在支架结构20上并从第三通孔1231 露出,在此不做限制。
[0223]
在一些实施例中,第一操控键31可包括转动控制键310,第二操控键33可包括加解锁结构330,第三操控键34可包括刹车按键341、拍照/录像按键342及开关/模式切换按键343中的至少一种。
[0224]
具体地,请参阅图2及图20,转动控制键310设置在壳体10的安装部12的第一侧121,并从第一通孔1211露出,转动控制键310用于控制云台300的转动。示例地,当施加推力朝远离握持部12的方向推动转动控制键310时,云台300的俯仰轴电机301朝第一方向转动;当施加拉力朝接近握持部11的方向拉动转动控制键310时,云台300的俯仰轴电机301朝第二方向转动,第一方向与第二方向相反。例如,第一方向为逆时针方向,第二方向为顺时针方向;或者,第一方向为顺时针方向,第二方向为逆时针方向。
[0225]
在一些实施例中,当作用于转动控制键310的推力或拉力消失时,转动控制键310自动回到初始位置,即转动控制键310回到未受力之前的位置。其中,转动控制键310的初始位置包括第一通孔1211的中间位置。也即是说,当作用于转动控制键310的推力或拉力消失时,转动控制键310 回到第一通孔1211的中间位置。由于外力消失时,转动控制键310能够自动回到初始位置,用户无需手动将其归位即可直接进行下次操作,能够提升使用遥控器100的便捷性。
[0226]
请参阅图1、图7及图20,扳机32设置在支架结构20的第二侧122,并从第二通孔1221中伸出到壳体10外,扳机32用于控制无人机400的油门档位,以控制无人机400的电机402的转速。在一些实施例中,扳机32能够相对支架结构20转动,并且扳机32的转动力矩与转动角度呈线性关系。也即是说,扳机32的转动力矩越大转动角度也越大。在一些实施例中,当扳机32朝接近壳体10内的方向转动时,无人机400的电机402的转速增加,当扳机32朝远离壳体10内的方向转动时,无人机400的电机402的转速减小。在另一实施例中,当扳机32朝接近壳体10内的方向转动时,无人机400的电机402的转速减小,当扳机32朝远离壳体10内的方向转动时,无人机400 的电机402的转速增加。
[0227]
请参阅图9,具体地,扳机32包括相背设置的第一侧321及第二侧322,扳机32的第一侧321 设置有第二套接件323,扳机32的第一侧321转动连接在第一子支架212的与第二子支架213相背的一侧上,即第二子支架213安装在第一子支架212与扳机32相背的一侧。扳机32的第二侧322 为自由侧,扳机32的第二侧322能够相对支架结构20在活动空间2111中转动。具体地,连接轴 21251穿设扳机32的第一侧321,扳机32的第一侧321套设在连接部件2125的连接轴21251上,并收容在容置空间2124内,使扳机32能够绕着连接部件2125的连接轴21251转动。
[0228]
请继续参阅图9,扳机32还可包括扳机本体324、连接部325及弯曲的包覆部326。扳机本体 324用于供用户握持,扳机本体324包括相背的第一曲面3241及第二曲面3242。第二曲面3242相较于第一曲面3241更靠近连接子支架211。
[0229]
连接部325设置在第二曲面3242并位于扳机32的第一侧321,连接部325套设在连接部件2125 的连接轴21251上。连接部325包括限位面3251,在扳机32绕连接轴21251朝深入壳体10内部转动时,限位面3251用于与安装臂2123抵触以限定扳机32的转动,如此,限位面3251能够限制扳机32朝深入壳体10内部转动的最大行程。
[0230]
包覆部326设置在第一曲面3241上并位于扳机32的第一侧321,包覆部326也弯曲,且包覆部326的弯曲方向与第一曲面3242的弯曲方向相反。包覆部326包覆安装臂2123的第四子臂21234 的外侧。在扳机32绕连接轴21251朝远离壳体10内部转动时,包覆部326与第四子臂21234的外侧抵触以限定扳机32的转动,如此,包覆部326能够限制扳机32朝远离壳体10内部转动的最大行程。
[0231]
在一些实施例中,第一曲面3241上设置有防滑结构32411。防滑结构32411包括凹凸结构、防滑条及磨砂结构中的至少一种。由于第一曲面3241上设置有防滑结构32411,当用户握持防滑结构 32411处时,防滑结构32411能够防滑以增加操作扳机32的手感,以能够更好的通过操控扳机32 来操控无人机400的油门档位。
[0232]
在一些实施例中,扳机本体324设置有穿孔3243以供用户的手指穿过。穿孔3243贯穿扳机32 第一曲面3241与第二曲面3242夹持的两个平面。穿孔3243的数量可以是1个、2个、3个等,在此不作限制。由于在扳机本体324上设置有穿孔3243以供用户的手指穿过,能够增加操作扳机32 的稳定性及手感。
[0233]
请参阅图10,遥控器100还可包括位置弹性件327。弹性件327收容在安装臂2123围成的容置空间2124内,弹性件327包括相背设置的第一侧3271及第二侧3272。弹性件327的第一侧3271 与安装臂2123结合,弹性件327的第二侧3272与扳机32的第一侧321结合,弹性件327用于对扳机32提供弹性回复力使得扳机32绕连接部件2125的连接轴21251朝远离壳体10内部转动。由于弹性件327能够为扳机32提供弹性回复力,用户在使用扳机32时仅需要对扳机32向一个方向上用力,若需要将扳机32朝另一个方向运动时用户松开扳机32即可实现。此外,由于扳机32包括包覆部326,包覆部326能够限制扳机32在弹性件327回复力的作用下朝远离壳体10内部转动的最远运动位置,避免扳机32从壳体10内伸出过远。本实施方式中,弹性件327可包括弹簧,传统设计一般会采用扭簧提供转动力矩,但扭簧存在一致性不足、寿命较短、扭簧支点磨损等问题,相比较地,本技术采用弹簧作为弹性件327,一致性较好,寿命较长,也无支点磨损问题。
[0234]
示例地,请结合图9及图10,弹性件327的第一侧3271套在安装臂2123的第一套接件21236 上,弹性件327的第二侧3272套在扳机32第一侧321的第二套接件323上。当给扳机32的自由端施加外力,以使扳机32的第二侧322朝靠近壳体10内部的方向转动时,扳机32的第一侧321 朝远离壳体10内部的方向转动,即扳机32受力被触发绕连接轴21251朝第一方向转动,此时扳机 32带动弹性件327的第二侧3272朝远离弹性件327的第一侧3271运动,即弹性件327被拉长,以产生弹力;当扳机32自由端解除或减小受力时,弹性件327提供弹性回复力,以使弹性件327的第二侧3272朝靠近弹性件327的第一侧3271运动,同时弹性件327的第二侧3272带动扳机32的第一侧321朝靠近壳体10内部的方向转动,此时扳机32的第二侧
322朝远离壳体10内部的方向转动,即扳机32受力被触发绕连接轴21251朝第二方向转动。
[0235]
需要说明的是,扳机32的自由端可以是扳机32除扳机32的第一侧321以外的任何地方。也即是说,只需要给扳机32除了与连接轴21251连接的第一侧321以外的任何地方施加外力,扳机 32都能够绕连接轴21251转动。此外,设置在安装臂2123上的第一套接件21236可以设置在第一子臂21231、第二子臂21232、第三子臂21233、第四子臂21234及第一本体2121中的任意一个上,在此不作限制。
[0236]
请参阅图9,遥控器100还可包括位置检测器328,位置检测器328设置在支架结构20上并用于检测扳机32相对支架结构20转动的转动角度,转动角度与无人机400的油门档位对应。当扳机 32的自由端被触发并使扳机32转动时,无人机400能够响应不同的转动角度以执行对应的油门档位。
[0237]
位置检测器328设置在第一子支架212上。具体地,请参阅图10,位置检测器328包括位置检测电路板3281及位置检测芯片3282。位置检测电路板3281安装在第二子臂21232上并位于容置空间2124外。位置检测芯片3282安装在位置检测电路板3281的远离第二子臂21232的一侧并与位置检测电路板3281电连接。此时,连接部件2125的连接轴21251依次穿设第二子臂21232、位置电路板3281及位置检测芯片3282。
[0238]
请参阅图1、图5及图20,加解锁结构330设置在支架结构20上或第一壳13上并从第三通孔 1231露出,加解锁结构330用于控制无人机400的桨叶401的锁定与解锁。示例地,加解锁结构 330能够在第一档位与第二档位之间切换。其中,第一档位对应第三通孔1231的第一位置12311,第二档位对应第三通孔1231的第二位置12312,第一位置12311与第二位置12312不同。当加解锁结构330处于第一档位时,无人机400的桨叶401被锁定而无法被驱动旋转;当加解锁结构330处于第二档位时,无人机400的桨叶401被解锁以能够被驱动旋转。当然,在一些实施例中,当加解锁结构330处于第一档位时,无人机400的桨叶401被解锁以能够被驱动旋转;当加解锁结构330 处于第二档位时,无人机400的桨叶401被锁定而无法被驱动旋转。
[0239]
请参阅图11,加解锁结构330包括加解锁支架331、弹性部件332及拨动部件334。弹性部件 332安装于加解锁支架331上,并且弹性部件332与加解锁部件331共同形成容纳腔333。拨动部件334安装在加解锁支架331上,并且拨动部件334至少部分收容在容纳腔333内。
[0240]
具体地,加解锁支架331包括相背设置的第一侧33101及第二侧33102。加解锁支架331包括依次连接的第一侧壁3311、第二侧壁3312及第三侧壁3313。其中,第一侧壁3311与第三侧壁3313 相对,加解锁支架331的与第二侧壁3312相对的一侧为开放侧。第一侧壁3311、第二侧壁3312及第三侧壁3313共同围成安装腔3314,安装腔3314用于收容拨动部件334。
[0241]
加解锁支架331的第一侧壁3311包括第一侧33112、外侧面33113及第二侧33114,其中,第一侧壁3311的第一侧33112开设有第一凹陷33111,第一侧壁3311的第一侧33112与第一侧壁3311 的第二侧33114相背设置,第一侧壁3311的侧面33113夹持在第一侧壁3311的第一侧33112与第一侧壁3311的第二侧33114之间,并且第一侧壁3311的第一侧33112相较于第二侧33114更靠近弹性部件332。
[0242]
加解锁支架331的第三侧壁3313包括第一侧33132、外侧面33133及第二侧33134,
其中,第三侧壁3313的第一侧33132开设有第二凹陷33131,第三侧壁3313的第一侧33132与第三侧壁3313 的第二侧33134相背设置,第三侧壁3313的侧面33133夹持在第三侧壁3313的第一侧33132与第三侧壁3313的第二侧33134之间,并且第三侧壁3313的第一侧33132相较于第二侧33134更靠近弹性部件332。
[0243]
请继续参阅图11,加解锁支架331还可包括第一装配件3317,第一装配件3317自第一侧壁3311 的远离安装腔3314的外侧面33113延伸,第一装配件3317用于与外部装置,例如第一壳13连接。具体地,第一装配件3317包括延长臂33171和结合部33172。延长臂33171设置在第一侧壁3311 的远离安装腔3314的外侧面33113。结合部33172设置在延长臂33171的自由端,结合部33172上开设有安装孔33174。请结合图5,锁紧件3319穿过结合部33172上的安装孔33174并锁紧在外部装置(例如第一壳13)的螺纹孔内,以将加解锁支架331安装在外部装置上。在一些实施例中,结合部33172朝向拨动部件334的一侧设置有定位槽33173,定位槽33172用于与外部装置上开设有螺纹孔的凸柱配合。如此能够限定加解锁结构330在外部装置中的安装位置,降低了安装加解锁结构330的难度。
[0244]
请继续参阅图11,在一些实施例中,加解锁支架331还可包括第二装配件3318,第二装配件 3318自第三侧壁3313的远离安装腔3314的外侧面33133延伸,第二装配件3318用于与外部装置,例如第一壳13连接。示例地,第二装配件3318包括开设有螺纹孔33182的突柱33181,请结合5,突柱33181用于与外部装置上的限位凹槽1334配合,并且突柱33181的螺纹孔33182与限位凹槽 1334的贯通孔13341对应。
[0245]
需要说明的是,在本技术实施例中,由于加解锁支架331是安装在遥控器100的壳体10的第一壳13上的,因此在本技术实施例中第一装配件3317及第二装配件3318均用于与第一壳13连接,请结合图5,此时第一壳13的内壁130上设置有开设螺纹孔1336的凸柱1335,及底部开设贯通孔 13341的限位凹槽1334。定位槽33172用于与第一壳13内壁130上的凸柱1335配合,锁紧件3319 穿过结合部33172上的安装孔33174并锁紧在壳体13上凸柱1335的螺纹孔1336内,以将加解锁支架331安装在第一壳13上。第二装配件3318的突柱33181的螺纹孔33182与第一壳13上限位凹槽1334底部的贯通孔13341对应,锁紧件3310自安装部12的第二侧122(外部)穿过贯通孔 13341并锁紧在螺纹孔33182内,以将加解锁结构330安装在第一壳13的内壁130上。
[0246]
请参阅图11及图13,弹性部件332安装在加解锁支架331的第一侧33101。弹性部件332包括弹性的悬臂3321、主体部3322及两个连接臂3323。悬臂3321设置在主体部3322上并朝加解锁支架331的第二侧33102延伸,悬臂3321的自由端,即悬臂3321远离主体部3322的一端,包括朝向拨动部件334凸出的凸面33211。两个连接臂3323设置在主体部3322的相背两侧,并且两个连接臂3323分别安装在加解锁支架331的第一侧壁3311及第三侧壁3313上。示例地,每个连接臂3323的一侧设置有第一安装件3324,第一安装件3324与设置在第一侧壁3311的第一侧33112 及第三侧壁3313的第一侧33132的第一配合件3315配合,以将连接臂3323与第一侧壁3311及第三侧壁3313结合。每个连接臂3323的一侧设置有第二安装件3325,第二安装件3325与设置在加解锁支架331的第一侧壁3311的一侧面及第三侧壁3313的一侧面的第二配合件3316配合,以进一步将连接连3323与第一侧壁3311及第三侧壁3313结合。
[0247]
请继续参阅图11,拨动部件334安装在加解锁支架331上,并且拨动部件334至少部
分收容在容纳腔333内。拨动部件334能够相对加解锁支架331转动而在第一档位与第二档位之间切换,以选择性地对无人机400的桨叶401进行锁定与解锁。其中,拨动部件334在第一档位与第二档位之间切换时,拨动部件334经过一过渡档位,在过渡档位时,弹性部件332与拨动部件334相抵触,以使拨动部件334能够切换到第一档位或第二档位。
[0248]
具体地,请结合图13,拨动部件334包括凸轮3341,凸轮3341包括第一抵触面3342及第二抵触面3343,第一抵触面3342与第二抵触面3343倾斜相接形成相接处33411。此时,弹性件332 的悬臂3321上的凸面33211朝向凸轮3341凸出,并且凸面33211能够与第一抵触面3342、第二抵触面3343、或相接处33411抵触。例如,如图12及图13,当拨动部件334在第一档位时,悬臂3321 与第一抵触面3342抵触;如图请参阅图15及图16,当拨动部件334在第二档位时,悬臂3321与第二抵触面3343抵触;当拨动部件334在过渡档位时,悬臂3321与相接处33411抵触。
[0249]
在一些实施例中,第一档位和第二档位对应于两个要由拨动部件334控制的状态,例如,对应于无人机400的开机状态、关机状态。作为另一示例,第一档位可以对应于无人机400的锁定状态,第二档位可以对应于无人机400的解锁状态。在无人机400的锁定状态下,例如,无人机400的转子叶片组件将被阻止旋转。
[0250]
请参阅图11,拨动部件334还可包括拨动本体3344及第一限位块3345,拨动本体3344位于加解锁支架331内,并且在拨动本体3344的转动方向上包括第一侧33441及第二侧33442。第一限位块3345设置在拨动本体3344的第一侧33441,第一限位块3345能够与弹性部件332抵触以限定拨动本体3344在第一转动方向的转动行程;第一限位块3345能够与加解锁支架331的第一侧33101 (顶部)抵触以限定拨动本体3344在第二转动方向上的转动行程,第一转动方向与第二转动方向相反。如此,能够限制拨动本体3344的最大转动范围,避免拨动本体3344转动距离过大。需要说明的是,在本技术的实施例中,以从第一侧壁3311看向第三侧壁3313的视角来看,即以图13的视角来看,第一转动方向是顺时针方向,第二转动方向是逆时针方向。
[0251]
拨动部件334还可包括操控键3347,操控键3347设置在拨动本体3344上并从加解锁支架331 中穿出,操控键3347与第一限位块3345分别自拨动本体3344的两侧延伸。在一些实施例中,操控键3347上设置有防滑结构33471。防滑结构33471包括凹凸结构、防滑条及磨砂结构中的至少一种。由于操控键3347上设置有防滑结构33471,拨动部件3344能够防滑以增加操作操控键3347的手感。
[0252]
请参阅图11及图16,在拨动本体3344的轴向上,拨动本体3344包括相对的第三侧33443及第四侧33444,凸轮3341设置在拨动本体3344的第三侧33443。拨动部件334还可包括第一转轴 3348及第二转轴3349,第一转轴3348设置在凸轮3341上,第二转轴3349设置在拨动本体3344 的第四侧33444。第一转轴3348与第二转轴3349穿设在加解锁支架331上并能够相对加解锁支架 331转动,以带动凸轮3341及拨动本体3344同步转动。示例地,第一转轴3348安装在第一凹陷 33111内,以使第一转轴3348能够转动地穿设在第一侧壁3311上,第二转轴3349安装在第二凹陷 33131内,以使第二转轴3349能够转动地穿设在第三侧壁3313上,第一限位块3345能够与第二侧壁3312的第一侧33121抵触,拨动部件334的操控键3347自开放侧从加解锁支架331穿出。如此用户仅需要控制操控建3347,即可控制拨动部件334在弹性部件332与加解锁支架331形成的容纳腔333内转动。
[0253]
需要说明的是,在一些实施例中,第一转轴3348的中心轴与第二转轴3349的中心轴在同一条直线上,如此第一转轴3348和第二转轴3349能够同步转动,以使拨动部件334转动的更加平稳,从而提升用户使用遥控器100的体验感。当然,在一些实施例中,第一转轴3348的中心轴与第二转轴3349的中心轴也可以在平行的两条直线上,在此不作限制。
[0254]
请参阅图11及图14,在一些实施例中,加解锁支架331的内壁上设置有抵触块3304,拨动部件334还包括第二限位块3346,第二限位块3346设置在拨动本体3344的第四侧33444。第二转轴 3349设置在第二限位块3346的远离拨动本体3344的一侧上,第二限位块3346能够与抵触块3304 抵触,以限定拨动本体3344在第一转动方向上的转动行程。如此能够避免拨动本体3344在第一转动方向上转动行程过大。
[0255]
请参阅图11,加解锁结构330还可包括检位装置335,检位装置335设置在加解锁支架331内。当拨动部件334在第二档位时,拨动本体3344的第二侧33442触发检位装置335。在一些实施例中,检位装置335能够拆卸地安装在加解锁支架331的内壁上,并位于拨动本体3344与加解锁支架331 的内壁之间。示例地,检位装置335包括检位板3351及检位开关3352。检位板3351设置在加解锁支架331的内壁上,检位板3351用于与外界电路板电性连接以传输电信号。检位开关3352设置在检位板3351的靠近拨动本体3344的一侧并与检位板3351电性连接。如图13所示,在拨动部件334 在第二档位时,拨动本体3344的第二侧33442抵触检位开关3352以触发检测装置335。如图16所示,在拨动本体3344的第二侧33442离开检位开关3352时,检位开关3352能够复位。如此加解锁结构330通过检位装置335来检测拨动部件334的位置,以此来判断拨动本体3344是否处于第二档位。
[0256]
请结合图17,在一些实施例中,加解锁支架331上还设置有过线孔3303,以供检位板3351的电路走线。如此能够避免检位板3351的电路走线混乱,影响遥控器100的组装。
[0257]
本实施例实现了:当用户通过将拨动部件334从第一档位或第二档位移动至另一档位而在两种状态之间切换,即,用户通过将拨动部件334从第一位置或第二位置移动到另一位置而在两种状态之间切换时,用户需要克服一阻力以便达到切换档位。这可以减少由于不小心拨动部件334而引起的状态意外切换的可能性,还通过用户拨动部件334的触觉反馈为用户提供了状态改变的提醒。
[0258]
请参阅图2,第三操控键34可包括刹车按键341、拍照/录像按键342及开关/模式切换按键343 中的至少一种。例如,第三操控键34仅包括刹车按键341;或者,第三操控建340包括刹车按键 341及拍照/录像按键342;或者,第三操控键34包括刹车按键341、拍照/录像按键342及开关/模式切换按键343。下面以第三操控键34包括刹车按键341、拍照/录像按键342及开关/模式切换按键343为例进行说明。示例地,刹车按键341设置在壳体10的安装部12的第四侧124并从对应的一个第四通孔1241露出,刹车按键341用于控制无人机400紧急悬停,切断遥控器100与无人机 400之间的体感控制。再次触发刹车按键341时,遥控器100可以继续对无人机400进行体感控制。此时遥控器100的当前姿态可以为体感控制的零位姿态。当然,遥控器100的刹车按键再次被触发时,无论遥控器100的当前姿态处于何种状态,体感控制的零位姿态也可以是一个预设好的姿态。按压拍照/录像按键342设置在壳体10的安装部12的第四侧124并从对应的另一个第四通孔1241 露出,当按压拍照/录像按键342的持续时长小于第一预定时长时,拍照/录像按键342用于控制无人机400的拍摄设备500拍照,当按压拍照/录像按键342的持续时长大于第一预定时长时,拍照/ 录像按键342用于控
制无人机400的拍摄设备500录像。开关/模式切换按键343设置在壳体10的安装部12的第四侧124并从对应的再一个第四通孔1241露出,当按压开关/模式切换按键343的持续时长小于第二预定时长时,开关/模式切换按键342用于切换无人机400的飞行模式,当按压开关 /模式切换按键342的持续时长大于第二预定时长时,开关/模式切换按键342用于开启或关闭遥控器100的电源45(图8所示)。
[0259]
请参阅图18及图19,在另一些实施例中,第一操控键31包括转动控制键310及负载控制按键 351,负载控制按键351可以包括例如拍照/录像按键351,第二操控键33包括电源开关按键352,第三操控键34包括刹车按键353、模式切换按键354及加解锁按键355中的至少一种。
[0260]
具体地,转动控制键310及拍照/录像按键351设置在壳体10的安装部12的第一侧121上,并从第一通孔1211露出,并且转动控制键310及拍照/录像按键351的结构及功能与上文实施例中转动控制键310及拍照/录像按键341的结构及功能相同,在此不作限制。电源开关按键352设置在支架结构20上并从第三通孔1231露出,电源开关按键352用于开启或关闭所述遥控器100的电源45 (图8所示)。
[0261]
在一些实施例中,负载可以是图像采集装置,例如,相机。负载控制按键351被配置为控制图像传感器以拍摄图像和视频。例如,负载控制按键351可以是被配置为使用户按下按钮并保持一段时间直到按钮被释放的按钮。按下按钮的持续时间是长于还是短于预定阈值确定按下按钮是用于照相还是视频拍摄的用户输入。例如,负载控制按键351可以被配置为在负载控制按键351的按下和释放的持续时间短于预定持续时间阈值时控制成像装置拍摄照片,并且可以被配置为控制用于视频拍摄的成像装置。当负载控制按键351的按压和释放的持续时间长于预定持续时间阈值时,控制进行拍摄。
[0262]
在一些其他实施例中,负载可以是播撒机、喷药器,例如喷药或喷液体、种子相关的负载。负载控制按键351被配置为可以被配置为控制喷雾器进行飞行中的活动,包括喷洒农药。
[0263]
请结合图20,第三操控键34包括刹车按键353、模式切换按键354及加解锁按键355中的至少一种。例如,第三操控键34仅包括加解锁按键355;或者,第三操控键34包括加解锁按键355 及刹车按键353;或者,第三操控键34包括刹车按键353、模式切换按键354及加解锁按键355。下面以第三操控键34包括刹车按键353、模式切换按键354及加解锁按键355为例进行说明。示例地,刹车按键353、模式切换按键354及加解锁按键355设置在壳体10的安装部12的第四侧124 上并从对应的第四通孔1241露出。刹车按键353用于控制无人机400的紧急悬停;模式切换按键 354用于切换无人机400的飞行模式;加解锁按键355用于控制无人机400的桨叶401的锁定与解锁。
[0264]
在一些实施例中,负载可以是图像采集装置,例如,相机。负载控制按键351被配置为控制图像传感器以拍摄图像和视频。例如,负载控制按键351可以是被配置为使用户按下按钮并保持一段时间直到按钮被释放的按钮。按下和释放的持续时间是长于还是短于预定持续时间阈值确定按下和释放是用于照相还是视频拍摄的用户输入。例如,负载控制按键351可以被配置为在负载控制按键 351的按下和释放的持续时间短于预定持续时间阈值时控制成像装置拍摄照片,并且可以被配置为控制用于视频拍摄的成像装置。当负载控制按键351的按压和释放的持续时间长于预定持续时间阈值时,控制成像装置进行拍摄。
[0265]
在一些其他实施例中,负载可以是播撒机、喷药器,例如喷药或喷液体、种子相关的负载。负载控制按键351被配置为可以被配置为控制喷雾器进行飞行中的活动,包括喷洒农药。
[0266]
请参阅图18及图20,在一些实施例中,加解锁按键355能够在第一档位与第二档位之间切换。例如,在一个例子中,加解锁按键355处于第二档位时,加解锁按键355被压下;加解锁按键355 处于第一档位时加解锁按键355复位。例如,在另一个例子中,通过按压开关进行第一档位与所述第二档位之间的切换。当加解锁按键355处于第一档位时,无人机400的桨叶401被锁定而无法被驱动旋转;当加解锁按键355处于第二档位时,无人机400的桨叶401被解锁以能够被驱动旋转。当然,在一些实施例中,当加解锁按键355处于第一档位时,无人机400的桨叶401被解锁以能够被驱动旋转;当加解锁按键355处于第二档位时,无人机400的桨叶401被锁定而无法被驱动旋转。
[0267]
请参阅图7,在一些实施例中,遥控器100还可包括装饰件50,装饰件50能够拆卸地安装在第二壳14上。装饰件50上设置有第五通孔51,操控结构30的第三操控键34自第五通孔51穿出至第二壳14外。由于增加了装饰件50,一方面能够保护设置在第二壳14内的元器件;另一方面能够使第二壳14的第四侧124更加平整美观。
[0268]
请继续参阅图3及图8,在一些实施例中,遥控器100还包括第一电路板41及天线单元60。第一电路板41收容在收容腔15内并安装在第一支架21的靠近弯折臂126的顶部的一侧,天线单元60收容在收容腔15内并位于第一支架21的远离第二支架23的一端与第一壳13的第二侧122 的内壁之间,第一电路板41与天线单元60电性连接以与天线单元60进行信号传输。
[0269]
具体地,天线单元60可安装在第一壳13上,天线单元60包括天线电路板61、第一辐射体62 和第二辐射体63。第一辐射体62和第二辐射体63均设置在天线电路板61上,第一辐射体62与第二辐射体63相交呈预定角度,例如呈直角或其他角度;第一辐射体62与第二辐射体63位于天线电路板61的靠近第一壳13的第二侧122的一侧。当然,在一些实施例中,天线单元60也可以安装在第一支架21的远离第二支架22的一端。本技术实施方式中的遥控器100内置一种新型x型天线单元60,能够保证遥控器100良好的射频性能。
[0270]
请参阅图8第一电路板41安装在第一子支架212与第二子支架213之间形成的收容空间214 内。当间隔件2122设置在第一本体2121上时,锁紧件215穿过第二本体2131、第一电路板41、及间隔件2122以将第二子支架213与第一电路板41一起固定在第一本体2121上。当间隔件2122 设置在第二本体2131上时,锁紧件215穿过第二本体2131、间隔件2122、第一电路板41、及第二本体2131以将第二子支架213与第一电路板41一起固定在第一本体2121上。由于间隔件2122将第一子支架212与第二子支架213隔开,能够使第一电路板41不与第一子支架212或第二子支架 213贴合,从而为第一电路板41提供足够的散热空间能够散热。
[0271]
在一些实施例中,第一子支架212与第二子支架213均为散热板,并且第一电路板41与第一子支架212之间填充有导热脂,如此能够使第一电路板41处产生的热量扩散到遥控器100的其他地方,避免第一电路板41处温度过高,当然,在一些实施例中,第一电路板41与第二子支架213 之间填充有导热脂;或者,第一电路板41与第一子支架212之间、及第一电路板41与第二子支架 213之间均填充有导热脂,在此不作限制。
[0272]
请参阅图8,遥控器100还包括第二电路板42及功能器件81。第二电路板42收容在
收容腔15 内并安装在第二支架22的靠近第二壳14的第四侧124,第二电路板42用于与操控结构30电性连接、及搭载功能器件81。需要说明的是,功能器件81包括但不限于蜂鸣器、第一操控键31的插座、扳机32的插座、第二操控键33的插座、及第三操控键34的插座。
[0273]
请继续参阅图8,遥控器100还可包括散热件70、检测器82及柔性电路板44。散热件70设置在第二子支架213的第二本体2131的远离第一子支架212的表面并与安装部12的顶部间隔。散热件70的数量为多个,每个散热件70的远离支架结构20的第二本体2131的端面设置有缺口711,多个缺口711对应并共同形成安装空间712。在一些实施例中,散热件70包括散热鳍片71。
[0274]
检测器82设置在安装空间内712内并通过柔性电路板44与遥控器100的第二电路板42电性连接。检测器82可包括指南针、距离检测器、重力加速度计中的至少一个,当检测器80包括指南针时,第一子支架212及第二子支架213可以由铝制成。由于第一子支架212及第二子支架213由铝制成,相较于由钢、铁等其他由磁性的材料制成,能够降低指南针受到磁场的干扰,从而提高指南针工作的准确度。
[0275]
请继续参阅图8,遥控器100还可包括第三电路板43及电源45。电源45设置于第三支架23,例如,安装在第三支架23的收容仓2315内,并被盖体232遮盖。第三电路板43用于搭载主控制器83,第三电路板43通过柔性线路板44与遥控器100的第一电路板41电性连接以使得第三电路板43上的主控制器83能够控制第一电路板41上的电子器件。第三电路板43与遥控器100的第二电路板42电性连接,以使得第三电路板43上的主控制器83能够控制第二电路板42上的功能器件 81及检测器82。第三电路板43收容在收容腔15内并安装在第三支架23的第四侧2314,以与第二壳14的第四侧124的握持部11对应。当收容仓2315设置在第三支架本体231的第二侧2132时,第三电路板43设置在第三支架本体231的第四侧2314的侧壁上或作为第三支架本体231的第四侧 2314的侧壁;当收容仓2315设置在第三支架本体231的第四侧2314且盖体232为散热板时,第三电路板43设置在散热片上,即设置在盖体232上。
[0276]
在一些实施例中,第三电路板43还用于搭载外接端子145,外接端子145用于电性连接电源 45与外界电力,以实现对电源45的充电,外接端子145也可以电性连接主控制器83与外界终端以实现数据交换,在此不作限制。
[0277]
请参阅图7,在一些实施例中,遥控器100还可包括密封件90,密封件90活动安装在第二壳 14的底部,以选择性地密封或开放通槽144。示例地,密封件90包括密封本体91、连接柱92及定位块93。连接柱92设置在密封本体91上,连接柱92自通槽144伸入收容腔15内并与第二壳14 的内壁140连接,连接柱92能够改变从第二壳14伸出的长度。定位块93设置在密封本体91上,定位块93与连接柱92位于密封本体91的同一侧,定位块93用于与外接端子145插接。如此,在遥控器100无需与外接设备连接时,密封件90上的定位块93能够与外接端子145插接,以避免灰尘进入遥控器100,从而延长遥控器100的使用寿命。
[0278]
需要说明的是,在一些实施方式中,扳机组件320包括扳机32、第一支架21及位置检测器328,此时,扳机组件320可以安装在其他外接装置上,例如第一支架21安装在其他外接装置上。
[0279]
在另一实施方式中,扳机组件320可包括扳机32、支架结构20及位置检测器328,此时,扳机组件320也可以安装在其他外接装置上,例如第一支架21、第二支架22或者第三支架23中的任意一个安装在其他外接装置上。
[0280]
在一些实施例中,遥控器100可以是体感遥控器,其被配置为通过用户对遥控器的运动的控制 (即,体感控制)来接收用户输入。可以配置体感遥控器,以使用户更方便地控制可移动设备。一个原因是体感遥控器的运动可能更容易被用户理解,因为体感遥控器的运动与对应的用户命令的类型具有直观的联系。例如,遥控器100可以被配置为当用户向前移动或旋转遥控器100时控制可移动设备向前移动。作为另一示例,遥控器100可以被配置为当用户将遥控器100向左移动时控制可移动设备向左移动。与尝试确保他/她正在按压/操纵正确的控制组件相比,用户可能会更容易理解。通过使用户能够通过简单地移动遥控器来发送某些用户命令,体感遥控器也可以至少在减少手指需要操作的控制部件或机构的数量的程度上简化控制部件。
[0281]
然而,当手指在遥控器100上移动并操作控制部件时,这种移动和操作可能会干扰体感控制。例如,如果拇指从第一侧121上的自然静止位置运动以操作第二侧122上的刹车按键341,则拇指的运动可能引起手甚至手腕的运动,这反过来可能摇动遥控器100。体感遥控器可能会错误地接收到这种不希望的震动,作为用户输入来控制可移动设备。
[0282]
与可移动设备静止或低速移动时发生的干扰相比,当中途任务的用户控制干扰可移动设备移动时的体感控制时,此问题可能会加剧。例如,如果第一侧121和第二侧122上的控制组件被配置为在无人机飞行时接收用于控制无人机的飞行活动的用户输入,则手指在第一侧121和第二侧122之间移动所引起的摇动可能会发生。被体感遥控器误接收为轮流的用户输入。这不仅会导致无人机不必要的运动,而且还会造成危险。作为另一示例,用拇指按压第二侧122上的按钮可导致遥控器向前旋转,这导致体感遥控器的另一种不期望的运动。为了解决该干扰问题,优选将控制中部任务或接收高频用户输入的控制部件放置在拇指自然搁置的一侧,以便在操作时对遥控器100造成最少的不必要的运动。第一侧121是示例性遥控器的最优选侧,以放置控制中途任务或接收考虑到干扰问题的高频用户输入的控制组件。这仅是因为如果右手握住遥控器100,则拇指自然停在第一侧121 上,并且因为与将拇指(或其他手指)拉远至第二侧122或至第三侧123相比,拇指在第一侧121 上的操作(例如按动)将导致遥控器100的移动最少。
[0283]
在一些实施例中,有利于在第一侧121上具有中途任务和/或频繁使用的控制部件的上述因素可以与其他因素一起考虑。例如,尽管由于上述摇动问题,将中途控制部件放置在第二侧122上而不是放置在第一侧121上是不利的,但是由于诸如此类的原因,可能不需要将所有控制部件都放置在第一侧121上。如果第一侧121的表面积有限,则在同一侧上有太多的控制部件时,可以减小其他控制部件的意外接触机会。考虑到第二侧122更靠近第一侧121,第二侧122可能比第三侧123更有利于放置控制部件。作为另一个示例,对于某些控制部件(例如电源开关,制动按钮等)可能是理想的。遥控器100远离遥控器100上最频繁操作的控制部件或拇指的静止位置,以使用户不会轻易地、不经意地触摸这些控制部件。在一些其他实施例中,将更频繁使用的控制部件放置在第二侧 122上而不是在第三侧123上。在一些其他实施例中,将控制中途活动的控制部件放置在第二侧122 上可能比在第三侧123上放置更有利。
[0284]
在一些实施例中,遥控器100在第三侧123上包括控制组件33。例如,第二操控键33可以是电源开关。与大多数(如果不是全部)控制组件相比,电源开关是一种不太常用的控制组件。实际上,当控制可移动设备正在移动的中途活动时,用户可能会尝试不要不小心触
摸电源开关。因此,可能更有利的是将电源开关放置在第三侧123上,使得电源开关的位置远离用户更频繁地操作的控制部件。在一些其他实施例中,可移动设备是车辆,并且第二操控键33被配置为仅在可移动设备不动或低速移动时才接收针对可移动设备的用户输入。例如,第二操控键33可以是电源开关。仅当可移动设备静止不动或低速移动时才关闭可移动设备。这是因为当可移动设备快速移动时,关闭可移动设备很危险,并且可能会造成伤害。作为另一示例,第二操控键33可以被配置为控制可移动设备的锁定和解锁。类似地,出于安全原因,仅当可移动设备静止或低速移动时才适合锁定驱动可移动设备的马达。
[0285]
请参阅图22,本技术实施例还示出了根据本公开的实施例的示例性遥控系统1000。遥控系统 1000包括无人驾驶飞机400,如参照图1、图2、图18、图19描述的遥控器100。遥控系统1000 包括图1、图2、图18、图19中所示的设备以及头戴式设备600。在一些实施例中,遥控系统1000 包括其他设备,诸如移动设备或基于云的服务器。
[0286]
在一些实施例中,无人机400包括图像传感器500。图像传感器500可以是照相相机,摄像机,红外成像装置,紫外线成像装置,x射线设备,超声成像装置,在一些实施例中,无人机400可以进一步包括位于无人机400的不同位置处的一个或多个图像传感器500,以基于不同的角度,视角和/或技术来捕获数据。
[0287]
头戴式设备600被配置为佩戴在用户的头上并包括显示器700。在一些实施例中,头戴式设备 600为一副眼镜的一般形状,并且显示器700包括两个显示屏701和702。显示屏701和显示屏702 分别对应于用户的左眼和右眼。在一些实施例中,显示屏701和702被配置为向用户显示图像或视频流的三维(3d)显示。在一些其他实施例中,显示屏701和702被配置为向用户显示图像或视频流的二维显示。头戴式设备600可以在其外表面上包括一个或多个用户输入设备800。例如,用户输入设备800可以在头戴式设备600的外表面的一侧上包括一个或多个按钮。
[0288]
在一些实施例中,遥控系统1000的设备通过网络彼此通信。例如,无人机400能够将由图像传感器500捕获的数据(图像数据)传输到遥控器100和头戴式设备600。经由网络。在一些实施例中,无人机400可以包括处理器或图像处理模块,以在传输到网络中的其他设备之前处理由图像传感器500捕获的数据。在一些其他实施例中,除无人机400之外的设备可以处理该传感器。图像传感器500捕获的数据。例如,遥控系统1000可以包括服务器或移动设备,该服务器或移动设备配置为处理图像传感器500捕获的数据,然后将处理后的数据传输到遥控系统1000中的其他设备,例如头戴式设备600或无人机400。在一些实施例中,遥控系统1000的设备通过任何适当的通信技术(例如局域网)进行实时通信。网络(lan),广域网(wan)(例如internet),云环境,电信网络(例如3g,4g,5g),wifi,蓝牙,射频(rf),红外(ir)或任何其他通讯技术。
[0289]
在一些实施例中,头戴式设备600包括一个或多个天线,其电连接到头戴式设备600的一个或多个处理器。头戴式设备600的一个或多个处理器与遥控系统1000中的其他设备通信。天线通过诸如遥控器100和无人机400之类的天线。在一些实施例中,遥控系统1000具有一个或多个通信链路,用于无人机400,遥控器100和头戴式设备600之间的数据通信。遥控系统1000可以具有用于传输飞行控制数据的第一通信链路和用于传输视觉数据的第二通信链路。头戴式设备600的一个或多个处理器可能能够将经由一个或多个天线60接收的数据转换为图像或视频流以在显示器700 上显示。头戴式设备600的一个或多个处理器
也可能能够处理经由一个或多个天线60和用户输入设备800接收的数据和用户输入以生成要在显示器700上显示的一个或多个图像或视频流。作为另一示例,遥控系统1000可以具有通信链路发送遥控器100和头戴式设备600之间的数据。头戴式设备600的一个或多个处理器可以处理来自遥控器100的用户输入,并将用户输入转换为显示器700 上所示的信息,或者调整显示器700上所示的内容。用户可以使用头戴式设备600上的用户输入设备,遥控器100上的用户输入设备或其组合来进行选择和操作。根据显示器700上显示的信息。在一些实施例中,一个或多个天线可以接收由图像传感器500捕获的数据,该数据已经由遥控系统1000 的一个或多个其他设备(例如,无人机400),移动设备处理过。服务器,服务器或其组合,从而降低了对头戴式设备600的数据处理能力的要求。
[0290]
图21示出了根据本公开的实施例的在遥控系统1000的示例性控制模式下的显示器700的演示。区域710是显示器700的显示区域的放大图,以示出显示器700向用户显示的内容。显示器700被配置为基于通过遥控系统1000的一个或多个通信链路接收的数据,例如来自无人机400的视觉数据,来显示一个或多个图像或视频流。例如,区域710包括示出一个或多个图像的视图。由图像传感器500(如图20所示)捕获的更多图像或视频流。视图由头戴式设备600的一个或多个处理器基于经由一个或多个天线60接收的数据生成。
[0291]
再次参考图10,在一些实施例中,遥控系统1000包括位置检测器328,并且能够基于由位置检测器328测量的位置数据来确定遥控器100的位置状态。位置检测器328设置在遥控器100的壳体10处。位置检测器328可包括一个或多个惯性传感器,例如惯性测量单元(imu)传感器,包括加速度计,陀螺仪和/或磁力计。位置检测器328可以进一步包括其他定位传感器,例如图像传感器,指南针,定位系统(例如,gps,glonass,伽利略,北斗,gagan,rtk等),运动传感器和/或接近传感器。位置状态包括与参考对象(例如地球)等相比的姿态,方向,高度,相对位置。位置数据包括与确定位置状态有关的数据。例如,位置数据可以是姿态信息(例如,角速度,旋转加速度,倾斜,平移运动加速度,对身体的比力等),方位信息或与周围环境或参考物体的相对距离。
[0292]
遥控系统1000基于位置检测器328测量的位置数据确定遥控器100的位置状态。在一些实施例中,遥控系统1000通过使用遥控器100的一个或多个处理器来确定遥控器100的位置状态。处理位置数据。在一些其他实施例中,位置数据被发送到遥控系统1000的其他设备,诸如无人机400,头戴式设备600,移动设备或服务器。然后,遥控系统1000的其他设备基于接收到的位置数据来确定遥控器100的位置状态。然后可以将确定的位置状态传输到遥控系统1000及其设备和组件,例如头戴式设备600。
[0293]
在一些实施例中,位置检测器328包括惯性测量单元(imu)3282,惯性测量单元(imu)3282 被配置为测量遥控器100的姿态信息。姿态信息可以包括角速度,旋转加速度,平移运动加速度,对身体的比力,imu 3282使用一个或多个加速度计,一个或多个陀螺仪或其组合来测量姿态信息。遥控系统1000基于由imu 3282测量的姿态信息来确定遥控器100的姿态状态。在一些实施例中,遥控器100的一个或多个处理器基于由imu 3282测量的姿态信息来确定遥控器100的姿态状态。在一些其他实施例中,遥控系统1000的其他设备或组件(例如,无人机400,移动设备或头戴式设备600)基于由imu 3282测量的姿势信息来确定遥控器100的姿势状态。
[0294]
在一些实施例中,位置检测器328包括磁力计(图未示),磁力计被配置为获得遥控
器100的方位信息。方位信息可以是磁场或磁偶极矩的量度。例如,磁力计可以是被配置为测量地球磁场并由此获得遥控器100的方位信息的罗盘。遥控器系统1000基于由磁力计测量的方位信息来确定遥控器100的方位。遥控器100的一个或多个处理器基于由磁力计测量的方位信息来确定遥控器100 的方位。在一些其他实施例中,遥控器系统1000的其他设备或组件基于方位信息来确定遥控器100 的方位。由磁力计测量。
[0295]
在某些实施例中,遥控器100是具有一个或多个体感控制模式的体感遥控器,使得由位置检测器328测量的位置数据或遥控器100的位置状态被用于控制无人机400的位置状态。例如,在体感控制模式下,遥控器100被配置为基于遥控器100的姿势状态来控制无人机400的移动。当遥控器 100倾斜到左侧时,无人机400朝着左侧方向移动。
[0296]
应理解,所公开的实施例的应用并不一定限于在以下描述中阐述和/或在附图和/或示例中示出的构造细节和组件的布置。所公开的实施例能够变化,或者能够以各种方式被实践或执行。
[0297]
如图1、图2、图18、图19所示,遥控器100被配置为由用户的右手握持和操作。可以构造根据本公开的镜像配置,以提供适合于由用户的左手握住和操作的遥控器。例如,关于遥控器的第一侧121的配置适于由右手握持,如前述实施例所描述的。图1、图2、图18、图19可以是相对于第三侧123的,适合于用左手握住的控制器的结构。如前述实施例所描述的,以及适于由右手握住的控制器的第三侧123的构造。图1、图2、图18、图19中的第一实施例可以是关于适合于用左手握住的控制器的相对于第一侧121的构造。作为另一示例,组件123位于第二侧122的左侧,用于适于由左手握住的遥控器。类似地,图1、图2、图18、图19中所示的遥控器100也可以是被配置为由用户的右手握持和操作的遥控器100。可以构造根据本公开的镜像配置,以提供适合于由用户的左手握住和操作的遥控器。
[0298]
需要说明的是,加解锁按键355包括但不限于以下功能:在一些实施例中,加解锁按键355用于对无人机400的电机进行控制。例如,启动无人机400的电机,关闭无人机400的电机。例如,当以第一操作方式操作该按键时,当无人机400处于起飞前的准备阶段,可以操作该按键进行起桨,即桨叶的解锁。又例如,以第二操作方式操作该按键,可以控制无人机400起飞。再例如,当无人机400处于飞行状态状态,以第三操作方式操作该按键时,可以控制无人机400降落。当无人机400 降落至降落面,还可以第四操作方式,实现桨叶401的锁定。例如,双击该按键,启动无人机400 电机;长按该按键,无人机400自动起飞至1m并悬停。无人机400悬停时双击该按键,无人机 400自动降落至地面并停止电机。扳机32包括但不限于以下功能:在一些实施例中,通过触发扳机 32,调整无人机400的油门档位。增加按压力度可增大飞行速度,松开即停止前进。刹车按键353 包括但不限于以下功能:在一些实施例中,刹车按键353可以被配置为控制无人机的制动。例如,刹车按键353可以是被配置为每当用户按下刹车按键353时接收用户输入的按钮。当刹车按键353 接收到用户的第一输入时,刹车按键353被配置为切断遥控器100与无人机400之间的体感控制。再次触发刹车按键353时,遥控器100可以继续对无人机400进行体感控制。此时遥控器100的当前姿态可以为体感控制的零位姿态。当然,遥控器100的刹车按键353再次被触发时,无论遥控器 100的当前姿态处于状态,体感控制的零位姿态也可以是一个预设好的姿态。例如,短按该按键,无人机400紧急刹车并悬停。再短按一次取消姿态固定并以摇杆此位置为姿态零位。长按该按键,启动智能返航。再短按一次取消智能返航。模式切换按键354包括但不限于以下功能:在一
些实施例中,模式切换按键354用于切换飞行档位。例如,短按档位开关切换档位。拍照/录像按键351 包括但不限于以下功能:在一些实施例中,拍照/录像按键351用于控制拍摄。例如,长按该按键用于切换拍照/录像模式,短按该按键用于拍摄照片或启动/停止录像。在一些实施例中,遥控器100 机身设置有云台俯仰滑杆,用于控制云台300俯仰,通过播控该滑杆,控制云台俯仰。
[0299]
请参阅图1、图2及图20,本技术还提供一种控制无人机400的遥控器100,包括手持部分11、第一控制组件及第二控制组件。其中,手持部分11包括手持部分的顶部12和手持部分的其余部分 11;第一控制组件在顶部12的第一侧。第一控制组件被配置为用于控制无人机400的云台300或无人机400的有效载荷。第二控制组件在顶部12的第二侧,第二侧与所述第一侧相邻,第二控制组件被配置成控制无人机400的运动。需要说明的是,第一控制组件包括上述实施例中设置在安装部12的第一侧121和/或第三侧123上的控制按键;第二控制组件包括上述实施例中设置在第二侧 122上的控制按键;顶部12的第一侧包括上述实施例中安装部12的第一侧121和/或第三侧123;顶部12的第二侧包括上述实施例中安装部12的第二侧122,下述实施例中相同不在赘述。
[0300]
由于对无人机400的云台300和/或负载进行控制的按键在遥控器100上相邻设置,有利于用户对遥控器100单手操作。
[0301]
在一些实施例中,顶部12的第二侧包括顶部12的后侧。需要说明的是,顶部12的后侧包括上述实施例中安装部12的第四侧124,下述实施例中相同不在赘述。
[0302]
在一些实施例中,第一控制组件还被配置为控制云台300的俯仰角。
[0303]
在一些实施例中,遥控器100还包括在第一侧的第三控制组件,该第三控制组件被配置为控制云台300或有效载荷。需要说明的是,第三控制组件包括上述实施例中设置在安装部12的第一侧 121和/或第三侧123和/或第四侧124上的控制按键,下述实施例中相同不在赘述。
[0304]
在一些实施例中,有效载荷包括成像装置500(如图20所示)。
[0305]
在一些实施例中,有效载荷包括喷雾器。
[0306]
在一些实施例中,有效载荷包括成像装置,及第三控制组件是按钮。
[0307]
在一些实施例中,第三控制组件还被配置为:当第三控制组件的按压和释放的持续时间短于预定持续时间阈值时,控制成像装置进行拍照;和第三控制组件还被配置为:当第三控制组件的按下和释放的持续时间长于预定持续时间阈值时,控制成像装置进行视频拍摄。
[0308]
在一些实施例中,遥控器100还包括设置于后侧的第三控制组件,第三控制组件被配置为控制所无人机400的运动。
[0309]
在一些实施例中,第三控制组件还被配置为控制无人机400的飞行模式。
[0310]
在一些实施例中,第三控制部件还被配置为控制无人机400的制动。
[0311]
在一些实施例中,遥控器100还包括设置于顶部的第二侧的第三控制组件。
[0312]
在一些实施例中,无人机400包括一个或多个马达;和第三控制组件被配置为控制一个或多个马达的转速。
[0313]
请参阅图1,在一些实施例中,手持部分11的顶部12从手持部分11以第一角度延伸,顶部12比手持部分的其余部分11向前延伸。
[0314]
请参阅图1,在一些实施例中,第一角度α为锐角。
[0315]
请参阅图3,在一些实施例中,遥控器100还包括位于遥控器100内部的主支架20,其中:第一控制组件被配置为用于与布置在主支架20上的一个或多个电路板电连接;第二控制组件被配置为与布置在主支架20上的一个或多个电路板电连接。
[0316]
请参阅图3及图8,在一些实施例中,遥控器100还包括位于遥控器100内部的主支架20,其中,主支架20包括设置在主支架20上的一个或多个电子组件。主支架20和放置在其上的一个或多个电子组件完全位于遥控器的内部空间内。主支架20被配置为通过与第一角度α一致地位于遥控器100的内部空间中而容纳第一角度α。需要说明的是电子组件包括上述天线单元60及功能器件 81。
[0317]
请参阅图3,在一些实施例中,天线60通过布置在主支架20上而被容纳在天线部分601;主支架20被配置为在天线60后方留出空间,以减少从天线60向后传输的信号损失。
[0318]
在一些实施例中,天线60有两个臂(62及63),两个臂(62及63)呈x形。
[0319]
在一些实施例中,两个臂(62及63)相互垂直。
[0320]
在一些实施例中,遥控器100包括惯性测量单元,惯性测量单元被配置为测量遥控器100的姿态状态。
[0321]
在一些实施例中,无人机400的姿态状态根据遥控器100的姿态状态而变化。
[0322]
在一些实施例中,遥控器100包括一种或多个控制模式;一个或多个所述控制模式包括默认模式;当遥控器100处于所述默认模式时,无人机400的姿势状态根据遥控器100的姿势状态而变化。
[0323]
在一些实施例中,姿势状态包括遥控器100的倾斜角度。
[0324]
请参阅图22,本技术实施例还提供一种遥控系1000。遥控系统包括无人机400及上述任意一项实施例的遥控器100,遥控器100用于控制无人机400。
[0325]
请参阅图22,本技术实施例还提供一种遥控系统1000。遥控系统1000包括无人机400、上述任意一项实施例的遥控器100及带有显示器的头戴式设备600。遥控器100用于控制无人机400,显示器700被配置为显示由无人机400捕获的一个或多个图像或视频。
[0326]
在一些实施例中,无人机400包括图像传感器500,图像传感器500被配置为捕获图像数据;显示器700被配置为基于图像数据显示一个或多个图像或视频。
[0327]
在一些实施例中,遥控器100包括惯性测量单元,惯性测量单元被配置为测量遥控器100的姿态信息;显示器700被配置为基于姿态信息显示遥控器100的姿态状态。
[0328]
在一些实施例中,遥控器100包括一个或多个控制模式。
[0329]
在一些实施例中,遥控器100处于默认模式时,无人机400的姿势状态根据遥控器100的姿势状态而变化。
[0330]
请参阅图1及图3,本技术还提供一种遥控器100。遥控器100包括手持部分11、支撑部分20 及一个或多个控制组件30。手持部分11的顶部12以第一角度α从手持部分11延伸,顶部12比手持部分11的其余部分11向前延伸。支撑部分20位于遥控器100内部,支撑部分20包括设置在支撑部分20上的一个或多个电子组件,至少部分的电子组件远离手持部分11设置;支撑部分20被配置为通过与第一角度α一致地位于遥控器100的内部空间中而容纳第一角度α。一个或多个控制组件30设置于手持部分的顶部12上,控制组件30被配置为控制无人机400。需要说明的是,电子组件包括但不限于天线单元60及功能器件81。
[0331]
由于收容在遥控器100内部的电子组件远离手持部分11,如此能够避免遥控器100在使用过程中,电子组件工作产生的热量传递到手持部分11,从而提升用户使用遥控器100的舒适度。
[0332]
请参阅图1及图3,在一些实施例中,支撑部分20包括第一支架部分23和第二支架部分22,支撑部分20还被配置为通过包括以下结构来形成第一角度α:第一支架部分23位于手持部分的其余部分内11;和第二支架部分22位于手持部分的顶部12内部。
[0333]
在一些实施例中,第一支架部分23以与手持部分的其余部分11相同的长度延伸。
[0334]
请参阅图8,在一些实施例中,手持部分11内部的第一支架部分23上设置有电源45。
[0335]
在一些实施例中,支撑部分20被配置为支撑电源45,使电源45不与遥控器100的外壳10直接接触。
[0336]
请参阅图8,在一些实施例中,第二支架部分22设有电路板42,支撑部分20还被配置为支撑电路板41,使电路板41不与遥控器100的外壳10直接接触。
[0337]
请参阅图8,在一些实施例中,遥控器100还包括位于支撑部分20的散热结构70。
[0338]
请参阅图3,在一些实施例中,遥控器100还包括:从手持部分的顶部12以第二角度延伸的天线部分601,天线部分601比所述顶部12更向前延伸;和容纳在天线部分601中的天线60。
[0339]
请参阅图3及图8,在一些实施例中,支撑部分20包括第一支架部分23、第二支架部分22、和第三支架部分21,支撑部分20还被配置为通过包括以下结构来形成第一角度和第二角度:第一支架部分23位于手持部分的其余部分11内;第二支架部分22位于手持部分的顶部内部12;和第三支架21部分位于天线部分601内部。
[0340]
请参阅图3及图8,在一些实施例中,天线60通过布置在第三支架部分21上而被容纳在天线部分601;支撑部分20被配置为使支撑天线60,使天线60不与遥控器100的外壳10直接接触。
[0341]
请参阅图3及图8,在一些实施例中,第三支架部分21上设有电路板41,支撑部分20还被配置为支撑电路板41,使电路板41不与遥控器100的外壳10直接接触。
[0342]
请参阅图8,在一些实施例中,遥控器100还包括散热结构70,散热结构70位于支撑部分20。
[0343]
在一些实施例中,散热结构70还包括至少一个散热器;至少一个散热器不与手持部分11的外壳10接触。
[0344]
在一些实施例中,支撑部分20设有电路板并与散热器热连接;支撑部分20被配置为支撑电路板,使电路板不与遥控器100的外壳10直接接触。
[0345]
在一些实施例中,天线60通过布置在支撑部分20上而被容纳在天线部分601中;支撑部分20 被配置为在天线60后方留有空间,以减少从天线60向后发送的信号的损失。
[0346]
在一些实施例中,天线60有两个臂(62及63),两个臂(62及63)呈x形。
[0347]
在一些实施例中,两个臂(62及63)相互垂直。
[0348]
在一些实施例中,其中一个或多个控制部件30分别包括第一端和第二端,第一端设置在支撑部分20,第二端通过与手持部分的顶部12相对应的外壳部分暴露。
[0349]
在一些实施例中,遥控器100还包括容纳在天线部分601中的指南针82,其中一个
或多个电子组件远离指南针82,以减少对指南针82的干扰。
[0350]
在一些实施例中,支撑部分20包括遥控器100的外壳10。
[0351]
请参阅图1,在一些实施例中,第一角度α为锐角。
[0352]
在一些实施例中,第一角度α为锐角,第二角度为锐角。
[0353]
在一些实施例中,遥控器100包括惯性测量单元,惯性测量单元被配置为测量遥控器100的姿态信息。
[0354]
在一些实施例中,遥控器100包括一个或多额控制模式;一个或多个所述控制模式包括默认模式;当遥控器100处于所述默认模式时,无人机400的姿势状态根据遥控器100的姿势状态而变化。
[0355]
在一些实施例中,遥控器100包括配置为测量遥控器100的方向的指南针82。
[0356]
在一些实施例中,支撑部分20和布置在支撑部分20上的一个或多个电子组件完全位于遥控器 100的内部空间内。
[0357]
在一些实施例中,支撑部分20包括主支架。
[0358]
在一些实施例中,遥控器100还包括外壳部分10,支撑部分20构被配置为与外壳10部分连接。
[0359]
在一些实施例中,一个或多个电子组件分布在支撑部分20的两个侧面。
[0360]
请参阅图1及图2,本技术还提供一种遥控器100。遥控器100包括手持部分11、第一控制组件33及第二控制组件32。第一控制组件位于遥控器100的第一侧123,第一控制组件33被配置为接收来自用户的拇指的输入。第二控制组件32位于遥控器100的正面124,第二控制组件32被配置为接收来自用户的食指的输入,第一控制组件与第二控制组件32相邻。如此有利于用于单手使用遥控器100。
[0361]
在一些实施例中,当用户握住遥控器100并使用遥控器100操作可移动设备时,拇指会放在第一侧。
[0362]
在一些实施例中,当用户握住遥控器100并使用遥控器100操作可移动设备时,用户的食指放在正面。
[0363]
在一些实施例中,第一控制组件还被配置为接收用于操作可移动设备的用户输入。
[0364]
在一些实施例中,遥控器100为用于控制可移动设备的体感遥控器;遥控器100被配置为通过用户对遥控器100的运动的控制来接收用户输入。
[0365]
在一些实施例中,通过用户对遥控器100的运动的控制接收到的用户输入用于控制可移动设备的运动。
[0366]
在一些实施例中,第一控制组件还被配置为接收由拇指的移动产生的用户输入;遥控器100的移动不受拇指的移动对遥控器100的影响,以产生由第一控制部件接收的用户输入。
[0367]
在一些实施例中,可移动设备是车辆。
[0368]
在一些实施例中,可移动设备包括至少一个中段任务设备。
[0369]
在一些实施例中,第一控制组件还被配置为接收用于操作至少一个中段任务设备的用户输入;通过用户对遥控器100的运动的控制接收到的用户输入用于控制可移动设备的运动。
[0370]
在一些实施例中,至少一个中段任务设备包括成像装置500(如图20所示)。
[0371]
在一些实施例中,用于操作至少一个中段任务设备的用户输入包括用于控制成像装置(如图20 所示)的用户输入。
[0372]
在一些实施例中,至少一个中段任务设备还包括云台300(如图20所示)。
[0373]
在一些实施例中,用于操作至少一个中图任务设备的用户输入包括用于控制云台300(如图20 所示)的用户输入。
[0374]
请参阅图1,在一些实施例中,第二控制组件32是触发器,触发器包括可旋转地固定在遥控器 100上的扳机32。
[0375]
在一些实施例中,第二控制组件32还被配置为接收用于操作可移动设备的用户输入。
[0376]
在一些实施例中,扳机32保持在角位移所需的力与角位移基本成比例。
[0377]
在一些实施例中,可移动设备包括一个或多个马达;第二控制组件32还被配置为接收用于控制一个或多个所述马达的转速的用户输入。
[0378]
在一些实施例中,使扳机32保持一定角度位移所需的力与角度位移基本成比例;第二控制组件32还被配置为接收用户输入,以将转速控制为与扳机32的角位移基本成比例。
[0379]
请参阅图20,在一些实施例中,可移动设备是无人机400。第二控制组件32还被配置为接收用于控制无人机400的移动速度的用户输入。
[0380]
在一些实施例中,需要一个力使扳机32保持离初始角度位置为角度位移;第二控制组件32还被配置为接收用户输入,用户输入用于将无人机400的移动速度控制为与扳机32的角位移基本成比例。
[0381]
在一些实施例中,当扳机32处于初始角度位置时,遥控器100控制无人机400悬停。
[0382]
在一些实施例中,当扳机32处于偏离初始角度位置的角位移时,无人机400以基本与角位移成比例的运动速度向前移动。
[0383]
在一些实施例中,使扳机32保持离初始角位置的角位移所需的力基本上与角位移成比例。
[0384]
请参阅图1,在一些实施例中,遥控器100还包括在遥控器100的后侧124的第三控制组件34,第三控制组件34被配置为接收来自用户的拇指的输入;遥控器100被配置为控制可移动设备。
[0385]
在一些实施例中,第三控制组件34被配置为接收包括设置的用户输入。
[0386]
在一些实施例中,第三控制组件34被配置为接收用户输入,用户输入包括可移动设备的锁定和解锁。
[0387]
在一些实施例中,第三控制组件34被配置为从用户接收制动命令以降低可移动设备的速度。
[0388]
在一些实施例中,遥控器100还包括设置在第一控制组件和第三控制组件34之间的突起,凸起用于防止拇指无意中触摸第三控制组件34。
[0389]
在一些实施例中,第三控制组件34被配置为:当用户握住遥控器100并使用遥控器100操作可移动设备时,第三控制组件34接收用户输入的频率低于第一控制组件接收用户输入的频率。
[0390]
在一些实施例中,遥控器100被配置为通过用户对遥控器100的运动的控制来接收用户输入;当遥控器100通过用户对遥控器100的运动的控制接收用户输入时,第三控制组件34被配置为比第一控制组件更少地接收用户输入。
[0391]
请参阅图1及图2,在一些实施例中,遥控器100还包括位于与第一侧123相对的第二侧121 的第四控制组件31。
[0392]
在一些实施例中,第四控制组件31是可移动设备的电源开关。
[0393]
在一些实施例中,可移动设备是车辆;第四控制组件31被配置为仅在可移动设备静止或低速移动时才接收可移动设备的用户输入。
[0394]
在一些实施例中,第四控制组件31被配置为:当用户握住遥控器100并使用遥控器100操作所可移动设备时,接收用户输入的频率低于第三控制组件34接收用户的频率;第三控制组件34被配置为当用户握住遥控器100并使用遥控器100操作所述可移动设备时,比第一控制组件32更少地接收用户输入。
[0395]
在一些实施例中,遥控器100是体感遥控器;遥控器100被配置为通过用户对遥控器100的运动的控制来接收用户输入。
[0396]
在一些实施例中,第四控制组件31被配置为当遥控器100移动时接收用户输入的频率低于第三控制组件34接收用户输入的频率;第三控制组件34被配置为在遥控器100移动时接收用户输入的频率低于第一控制组件31接收用户输入的频率。
[0397]
请参阅图3,遥控器100还包括天线部分601及天线60。天线部分601从手持部分的顶部12 以与顶部呈第一锐角延伸,天线部分601比顶部12更向前延伸,天线60容纳在天线部分601中。
[0398]
在一些实施例中,手持部分的顶部12以第二锐角从手持部分的其余部分11延伸,顶部12比手持部分的其余部分11向前延伸。
[0399]
在一些实施例中,位于背面的至少一个用户输入设备位于背面的与手持部分的顶部12相对应的部分。
[0400]
在一些实施例中,遥控器100还包括位于遥控器100内部的主支架20。
[0401]
请参阅图3,在一些实施例中,主支架20通过包括以下结构来形成第一锐角和第二锐角:位于天线部分内部601的第一支架部21;位于手持部分顶部12内部的第二支架部分22;和位于手持部分的其余11部分内的第三支架部分23。
[0402]
请参阅图3,在一些实施例中,天线60通过布置在第一支架部分21上而被容纳在天线部分601 中;主支架20被配置为防止天线60直接接触遥控器100的外壳10。
[0403]
请参阅图8,在一些实施例中,电源45设置在手持部分11内部的第三支架部分23上。
[0404]
在一些实施例中,主支架20被配置为保持电源45不与遥控器100的外壳10直接接触。
[0405]
请参阅图8,在一些实施例中,遥控器100还包括设置在顶部12内部的第二支架部分22上的电路板42;主支架20被配置为使电路板42不与遥控器100的外壳10直接接触。
[0406]
请参阅图8,在一些实施例中,遥控器100还包括与主支架20热连接的散热结构70;散热结构70包括至少一个散热器;至少一个散热器远离手持部分11的外壳10。
[0407]
在一些实施例中,遥控器100还包括设置在主支架20并与散热器热连接的电路板;
主支架构 20被配置为使电路板不与遥控器100的外壳10直接接触。
[0408]
请参阅图3,在一些实施例中,天线60通过布置在主支架20上而被容纳在天线部分601中;主支架20被配置为在天线60后方留出空间,以减少从天线60向后传输的信号损失。
[0409]
在一些实施例中,天线60有两个臂(62及63),两个臂(62及63)呈x形。
[0410]
在一些实施例中,两个臂(62及63)相互垂直。
[0411]
在一些实施例中,可移动设备是车辆。
[0412]
在一些实施例中,操作可移动设备包括控制可移动设备进行至少一项中段活动。
[0413]
请参阅图20,在一些实施例中,可移动设备是无人机400。
[0414]
在一些实施例中,操作可移动设备包括控制可移动设备进行至少一项飞行中的活动。
[0415]
在一些实施例中,至少一项飞行中的活动包括成像活动。
[0416]
在一些实施例中,至少一项飞行中的活动包括云台控制和成像活动。
[0417]
在一些实施例中,至少一项飞行中的活动包括喷雾活动。
[0418]
在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
[0419]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个所述特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个,除非另有明确具体的限定。
[0420]
尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1