防止人员误入搬运机器人危险区域的报警停机装置的制作方法
1.本实用新型涉及一种防止人员误入搬运机器人危险区域的报警停机装置,属于安全报警装置技术领域。
背景技术:
2.在玻璃基板生产过程中,有大量的搬运机器人进行工作,但和机器人配套的安全设备比较简单,一般都是护栏或是警戒线之类的,这类安全防护措施可靠性不高。
3.机器人发生安全事故,基本都是人员误入机器人工作区域,人和机器人发生碰撞或是挤压产生的,单纯的护栏、警戒线、定制线之类的安全措施,可靠度不高,不能完全避免发生安全事故,而根据以往经验,安全事故都是因为违章产生的,要从根本上解决,还得考虑设备本质的安全防护措施,因此,一种能够有效防止人员误入并且可以实现自动停机操作的报警停机装置成为目前的迫切需求。
技术实现要素:
4.针对现有技术的不足,本实用新型的目的在于提供一种防止人员误入搬运机器人危险区域的报警停机装置,解决了现有技术中出现的问题。
5.本实用新型所述的防止人员误入搬运机器人危险区域的报警停机装置,包括报警停机装置本体和玻璃搬运机器人,报警停机装置本体包括活动护栏和光电对射开关,光电对射开关设置在玻璃搬运机器人工作区域的外侧,光电对射开关连接有报警喇叭,活动护栏设置在玻璃搬运机器人工作区域的入口处,活动护栏上设有护栏门,护栏门的内侧设有电气限位开关,电气限位开关连接玻璃搬运机器人的控制端,电气限位开关和玻璃搬运机器人设置连锁,电气限位开关动作后玻璃搬运机器人进行停机。
6.进一步的,光电对射开关包括光电开关发送端和光电开关接收端,光电开关发送端和光电开关接收端进行连接通讯。
7.进一步的,光电开关发送端和光电开关接收端包括三组,分别设置在玻璃搬运机器人工作区域上、中、下多个位置处。
8.进一步的,护栏门的外部设有机械限位挡板。
9.进一步的,电气限位开关采用滚珠手柄式m904电气限位开关。
10.进一步的,活动护栏底部安装有4个刹车脚轮,每侧2个刹车脚轮。
11.进一步的,活动护栏侧面的上方设有制动插销。
12.本实用新型与现有技术相比,具有如下有益效果:
13.本实用新型所述的一种防止人员误入搬运机器人危险区域的报警停机装置,采用对射光电开关的设计,有效的避免人为进入玻璃搬运机器人工作区域,同时与玻璃搬运机器人进行连锁控制,第一时间控制玻璃搬运机器人停机避免对人员造成伤害,防止发生安全事故的发生,采用电气控制与机械防护相结合的方法,实现安全防护措施自动化,科技化;相比于其它安全措施,更具有可靠性,实用性;解决了现有技术中出现的问题。
附图说明
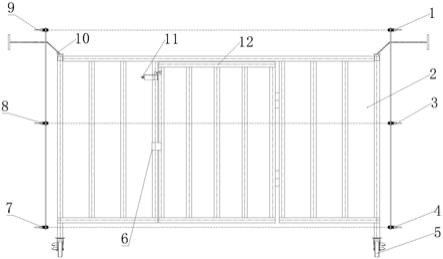
14.图1为本实用新型实施例中结构的主视图;
15.图2为本实用新型实施例中结构的俯视图;
16.图3为本实用新型实施例的电气连接图;
17.图中:1、第一光电开关发送端;2、活动护栏;3、第二光电开关发送端;4、第三光电开关发送端;5、刹车脚轮;6、机械限位挡板;7、第三光电开关接收端;8、第二光电开关接收端;9、第一光电开关接收端;10、制动插销;11、电气限位开关;12、护栏门。
具体实施方式
18.下面结合附图和实施例对本实用新型作进一步的说明:
19.实施例1:
20.如图1-3所示,本实用新型所述的防止人员误入搬运机器人危险区域的报警停机装置,包括报警停机装置本体和玻璃搬运机器人,报警停机装置本体包括活动护栏2和光电对射开关,光电对射开关设置在玻璃搬运机器人工作区域的外侧,光电对射开关连接有报警喇叭,活动护栏2设置在玻璃搬运机器人工作区域的入口处,活动护栏2上设有护栏门12,护栏门12的内侧设有电气限位开关11,电气限位开关11连接玻璃搬运机器人的控制端,电气限位开关11和玻璃搬运机器人设置连锁,电气限位开关11动作后玻璃搬运机器人进行停机。
21.光电对射开关包括光电开关发送端和光电开关接收端,光电开关发送端和光电开关接收端进行连接通讯。
22.光电开关发送端和光电开关接收端包括三组,分别设置在玻璃搬运机器人工作区域上、中、下多个位置处。
23.护栏门12的外部设有机械限位挡板6。
24.电气限位开关11采用滚珠手柄式m904电气限位开关。
25.活动护栏2底部安装有4个刹车脚轮5,每侧2个刹车脚轮5。
26.活动护栏2侧面的上方设有制动插销10。
27.本实施例的工作原理为:设置了三组光电对射开关,分别为第一光电开关发送端1、第一光电开关接收端9、第二光电开关发送端3、第二光电开关接收端8、第三光电开关发送端4和第三光电开关接收端7,当有人员误入机器人工作区域时,人员挡住了三组中任何一组时,系统报警,报警喇叭响起,报警喇叭设置有人工复位功能,如果不复位将一直响。玻璃搬运机器人此时不停机,给人警示作用,告知已快到危险区域;
28.如果人员不顾警示仍强行往机器人工作区域走,必须打开护栏门12才能进入,护栏门12外部设置有机械限位挡板6,只能往里边开,不能往外开,护栏门12内侧安装有电气限位开关11,护栏门12打开后,电气限位开关11动作,电气限位开关11和玻璃搬运机器人设置连锁,电气限位开关11动作后电气限位开关立即停机,不再运行,避免伤害到人。此时生产线停止,报警喇叭再响,外围人员能发现异常进行处置,此装置设计从设备本质安全的角度出发,能够最小的影响生产情况下,充分保障了异常情况下人的安全。
29.如图3所示,本装置的电气连接图,图中s1、s2和s3分别表示三组光电对射开关,bz1表示报警喇叭,ls1表示滚珠手柄式m904电气限位开关,滚珠手柄式m904电气限位开关
的两端连接至玻璃搬运机器人的控制端进行连锁控制,整个装置连接24vdc进行供电。
30.采用以上结合附图描述的本实用新型的实施例的一种防止人员误入搬运机器人危险区域的报警停机装置,采用对射光电开关的设计,有效的避免人为进入玻璃搬运机器人工作区域,同时与玻璃搬运机器人进行连锁控制,第一时间控制玻璃搬运机器人停机避免对人员造成伤害,防止发生安全事故的发生,采用电气控制与机械防护相结合的方法,实现安全防护措施自动化,科技化;相比于其它安全措施,更具有可靠性,实用性;解决了现有技术中出现的问题。但本实用新型不局限于所描述的实施方式,在不脱离本实用新型的原理和精神的情况下这些对实施方式进行的变化、修改、替换和变形仍落入本实用新型的保护范围内。
技术特征:
1.一种防止人员误入搬运机器人危险区域的报警停机装置,包括报警停机装置本体和玻璃搬运机器人,其特征在于:所述的报警停机装置本体包括活动护栏(2)和光电对射开关,所述光电对射开关设置在玻璃搬运机器人工作区域的外侧,光电对射开关连接有报警喇叭,所述活动护栏(2)设置在玻璃搬运机器人工作区域的入口处,活动护栏(2)上设有护栏门(12),护栏门(12)的内侧设有电气限位开关(11),电气限位开关(11)连接玻璃搬运机器人的控制端,电气限位开关(11)和玻璃搬运机器人设置连锁,电气限位开关(11)动作后玻璃搬运机器人进行停机。2.根据权利要求1所述的防止人员误入搬运机器人危险区域的报警停机装置,其特征在于:所述的光电对射开关包括光电开关发送端和光电开关接收端,光电开关发送端和光电开关接收端进行连接通讯。3.根据权利要求2所述的防止人员误入搬运机器人危险区域的报警停机装置,其特征在于:所述的光电开关发送端和光电开关接收端包括三组,分别设置在玻璃搬运机器人工作区域上、中、下多个位置处。4.根据权利要求1所述的防止人员误入搬运机器人危险区域的报警停机装置,其特征在于:所述的护栏门(12)的外部设有机械限位挡板(6)。5.根据权利要求1所述的防止人员误入搬运机器人危险区域的报警停机装置,其特征在于:所述的电气限位开关(11)采用滚珠手柄式m904电气限位开关。6.根据权利要求1所述的防止人员误入搬运机器人危险区域的报警停机装置,其特征在于:所述的活动护栏(2)底部安装有4个刹车脚轮(5),每侧2个刹车脚轮(5)。7.根据权利要求1所述的防止人员误入搬运机器人危险区域的报警停机装置,其特征在于:所述的活动护栏(2)侧面的上方设有制动插销(10)。
技术总结
本实用新型公开一种防止人员误入搬运机器人危险区域的报警停机装置,属于安全报警装置技术领域,包括报警停机装置本体和玻璃搬运机器人,报警停机装置本体包括活动护栏和光电对射开关,光电对射开关设置在玻璃搬运机器人工作区域的外侧,光电对射开关连接有报警喇叭,活动护栏设置在玻璃搬运机器人工作区域的入口处,活动护栏上设有护栏门,护栏门的内侧设有电气限位开关,采用对射光电开关的设计,有效的避免人为进入玻璃搬运机器人工作区域,同时与玻璃搬运机器人进行连锁控制,第一时间控制玻璃搬运机器人停机避免对人员造成伤害,防止发生安全事故的发生,采用电气控制与机械防护相结合的方法,实现安全防护措施自动化,科技化。科技化。科技化。
技术研发人员:张云晓 王光祥 杨振邦 任亚辉 贺盼旬
受保护的技术使用者:青岛融合光电科技有限公司
技术研发日:2021.12.29
技术公布日:2022/5/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1