一种基于智能网联环境的事故高发点辨识预警方法及系统与流程
1.本发明涉及车联网技术领域,尤其涉及一种基于智能网联环境的事故高发点辨识预警方法及系统。
背景技术:
2.随着经济建设步伐的加快,各大城市汽车保有量和交通量大幅上升,随着路网的不断完善交通更加便捷,但同时也带了巨大的安全隐患,交通事故的频发,对人民的生命财产安全造成了重大威胁。在交通事故发生前采取预警措施,是降低车辆事故率的有效措施。
3.现阶段对于降低交通事故的研究主要从事故黑点出发。交通事故在一些特定的地点,比如城市交叉路口、道路条件不完善的地点等交通事故发生的频率较高,因此可以通过对交通事故数据进行分析,得到事故黑点,通过在事故黑点加大对交通治理力度的力度,如设置警示牌提醒驾驶人存在的潜在道路风险,来降低事故发生的概率。但是在基于道路黑点警示过程中只考虑了静态信息,没有结合具体的行车情况做出有针对的预警。在预警的及时高效上不尽人意。其次,在某些情况下,急加速、急减速等驾驶状态虽然目前并没有导致事故的发生,但也是造成事故发生的潜在原因,若环境稍有变化,则极有可能转变为交通事故。因此对车辆发生事故的临界条件进行分析对于行车风险预警更有提前性和预警性。
4.车辆在公路上形式具有匀速、加速、减速运动等运动状态,在不同的运动状态下的加速度各不相同,加速度的大小对车辆行驶安全的影响也各不相同。车辆在行驶过程中主要有横向加速度、纵向加速度和轴向加速度。横向加速度的大小会影响驾驶员的心理、生理感受和车辆行驶的稳定性;从汽车的性能角度来看,车辆在轴向的加减速行驶,会产生生轴向加速度或减速度,车辆动力性与轴向加速度息息相关、制动性和形式稳定性和制动减速度息息相关,当加速度较小时,对于减轻驾驶的生理、心理负荷,保证车辆的行驶安全有着重要意义。
技术实现要素:
5.本发明所要解决的技术问题是针对上述现有技术中缺乏对车辆风险进行实时动态预警的不足,提供一种基于智能网联环境的事故高发点辨识预警方法及系统,有利于提高驾驶人的风险感知能力,对道路安全的改善起一定的推动作用。
6.本发明解决上述技术问题的技术方案如下:一种基于智能网联环境的事故高发点辨识预警方法,包括如下步骤:获取网联车的行车数据信息,基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图;获取目标车辆的行车数据信息,判断所述目标车辆是否驶入所述道路风险地图的范围内;在所述目标车辆驶入所述道路风险地图的范围内时根据所述目标车辆的行车数据信息生成预警信息并发送到所述目标车辆的车载显示设备。
7.本发明的有益效果是:本发明的基于智能网联环境的事故高发点辨识预警方法,通过获取的海量网联车的行车数据信息,并基于行车数据信息进行模糊聚类分析,得到道路风险地图,并在目标车辆进入道路风险地图的范围内时根据目标车辆的行车数据信息生成预警信息,弥补目前依靠静态黑点数据对交通事故进行预警的单一、低效的问题,实现对车辆的行车数据进行动态跟踪分析,增强驾驶员对道路潜在风险的感知能力,具有智能高效的特点,对交通安全有一定的保障,能够减少事故带来的人员以及经济损失。
8.在上述技术方案的基础上,本发明还可以做如下改进:进一步:所述基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图具体包括如下步骤:根据网联车的所述行车数据信息读取行车的横向加速度、纵向加速度和轴向加速度;对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值;根据所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值从所述行车数据信息中读取每起超过对应风险加速度阈值的事件,并在地理信息系统中标出作为点状对象;根据核密度估计函数得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图,并基于所述地理信息系统对每起超过对应风险加速度阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图。
9.上述进一步方案的有益效果是:通过对网联车的行车数据信息中的横向加速度、纵向加速度和轴向加速度分别进行模糊聚类分析,并通过对应加速度之间的亲疏关系确定用来表征亲疏关系的统计量,从而对不同的加速度信息进行分类,从而确定对应加速度的风险阈值,并计算每起超过对应风险阈值的事件的缓冲区,最终得到道路风险地图,以便于对驾驶员进行提醒。
10.进一步:所述对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析具体包括如下步骤:构建模糊聚类分析目标函数,并求解最优解,得到每个数据点到对应聚类中心类别的隶属度::::其中,jm(u,p)为模糊分类误差,u为原数据矩阵,p为聚类中心,为第k个数据点
到第i(i=1,2,
…
,c)类聚类中心的隶属度,d
ik
为样本与第i类中的原型矢量之间的失真距离,n为数据的个数,c为聚类类别的个数,m为加权指数,为第i类的聚类中心,a为距离权重矩阵,jm(u,p)为模糊分类误差;基于所述原数据矩阵建立模糊相似矩阵,并利用模糊运算生成模糊等价矩阵,并以所述隶属度为权重计算质心进行聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值。
11.上述进一步方案的有益效果是:通过构建所述模糊聚类分析目标函数计算每个数据点到对应聚类中心类别的隶属度,然后利用模糊运算生成模糊等价矩阵,并基于模糊等价矩阵和隶属度进行聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值,方便后续在对目标车辆的动态跟踪时确定目标车辆对应的加速度是否超过对应的阈值,以实现提醒驾驶员的目的。
12.进一步:所述根据核密度估计函数得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图具体包括如下步骤:分别将每起超过对应加速度阈值的事件在地理信息系统gis中标出,并根据核密度估计函数计算得到每起事件的缓冲区,其中,在每起事件在某一点s处的核密度函数的计算公式如下:其中,为每起事件在点s处的核密度值;为缓冲区半径;为事件点i到事件点s的距离;为没有边界的高斯核函数;利用地理信息系统gis得到道路潜在风险点的影响范围分布图。
13.上述进一步方案的有益效果是:通过核密度估计函数计算每起超过对应加速度阈值事件的缓冲区的半径,进而得到道路潜在风险点的影响范围分布图,以便对目标车辆进行跟踪和提醒。
14.进一步:所述基于所述地理信息系统对每起超过对应阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图具体包括如下步骤:利用地理信息系统对每起超过对应加速度阈值的事件形成的缓冲区进行多边形图层与图层的重叠分析,形成表征道路风险的综合性图层;将所述综合性图层与交通路网进行多边形与线的重叠分析,得到包含风险路段与风险区域的道路风险地图;所述判断所述目标车辆是否驶入所述道路风险地图的范围内具体包括如下步骤:实时获取目标车辆的位置信息,并将所述位置信息与所述道路风险地图进行对比,并在所述目标车辆的位置信息对应的位置位于所述道路风险地图中的风险路段时,确定所述目标车辆驶入所述道路风险地图的范围内。
15.上述进一步方案的有益效果是:通过对每起超过对应加速度阈值的事件形成的缓冲区进行多边形图层与图层的重叠分析,可以得到对应表征所有道路风险的综合涂层,然后对综合性图层与交通路网进行多边形与线的重叠分析,从而精确得到道路风险地图,作
为后续车辆提醒的边界范围,同时,当目标车辆的位置位于道路风险地图的边界范围内时,则对车辆的行车信息进行跟踪,并在加速度超过对应的风险阈值时及时提醒。
16.进一步:所述根据所述目标车辆的行车数据信息生成预警信息具体包括如下步骤:根据所述目标车辆的行车数据信息读取所述目标车辆的横向加速度、纵向加速度以及轴向加速度;将所述目标车辆的横向加速度、纵向加速度以及轴向加速度分别与对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值进行比较,并在横向加速度、纵向加速度和/或轴向加速度分别大于对应的所述横向加速度风险阈值、纵向加速度风险阈值和/或轴向加速度风险阈值时生成所述预警信息;其中,所述预警信息至少包括当前区域道路风险地图、横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值。
17.上述进一步方案的有益效果是:通过将所述目标车辆的横向加速度、纵向加速度以及轴向加速度分别与对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值进行比较,这样可以初步判断驾驶员是否在道路风险地图的边界范围内安全驾驶,并在横向加速度、纵向加速度和/或轴向加速度分别大于对应的所述横向加速度风险阈值、纵向加速度风险阈值和/或轴向加速度风险阈值时进行实时预警,提高驾驶员对潜在的风险路段的感知能力,实时性好。
18.本发明还提供了一种基于智能网联环境的事故高发点辨识预警系统,包括道路风险地图模块、判断获取模块和预警模块;所述道路风险地图模块,用于获取网联车的行车数据信息,基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图;所述判断获取模块,用于获取目标车辆的行车数据信息,判断所述目标车辆是否驶入所述道路风险地图的范围内;所述预警模块,用于在所述目标车辆驶入所述道路风险地图的范围内时根据所述目标车辆的行车数据信息生成预警信息并发送到所述目标车辆的车载显示设备。
19.本发明的基于智能网联环境的事故高发点辨识预警系统,通过获取的海量网联车的行车数据信息,并基于行车数据信息进行模糊聚类分析,得到道路风险地图,并在目标车辆进入道路风险地图的范围内时根据目标车辆的行车数据信息生成预警信息,弥补目前依靠静态黑点数据对交通事故进行预警的单一、低效的问题,实现对车辆的行车数据进行动态跟踪分析,增强驾驶员对道路潜在风险的感知能力,具有智能高效的特点,对交通安全有一定的保障,能够减少事故带来的人员以及经济损失。
20.在上述技术方案的基础上,本发明还可以做如下改进:进一步:所述道路风险地图模块基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图的具体实现为:根据网联车的所述行车数据信息读取行车的横向加速度、纵向加速度和轴向加速度;对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值;
根据所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值从所述行车数据信息中读取每起超过对应风险加速度阈值的事件,并在地理信息系统中标出作为点状对象;根据核密度估计函数得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图,并基于所述地理信息系统对每起超过对应风险加速度阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图。
21.上述进一步方案的有益效果是:通过对网联车的行车数据信息中的横向加速度、纵向加速度和轴向加速度分别进行模糊聚类分析,并通过对应加速度之间的亲疏关系确定用来表征亲疏关系的统计量,从而对不同的加速度信息进行分类,从而确定对应加速度的风险阈值,并计算每起超过对应风险阈值的事件的缓冲区,最终得到道路风险地图,以便于对驾驶员进行提醒。
22.本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现权利要求所述的基于智能网联环境的事故高发点辨识预警方法。
23.本发明还提供了一种基于智能网联环境的事故高发点辨识预警设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的基于智能网联环境的事故高发点辨识预警方法的步骤。
附图说明
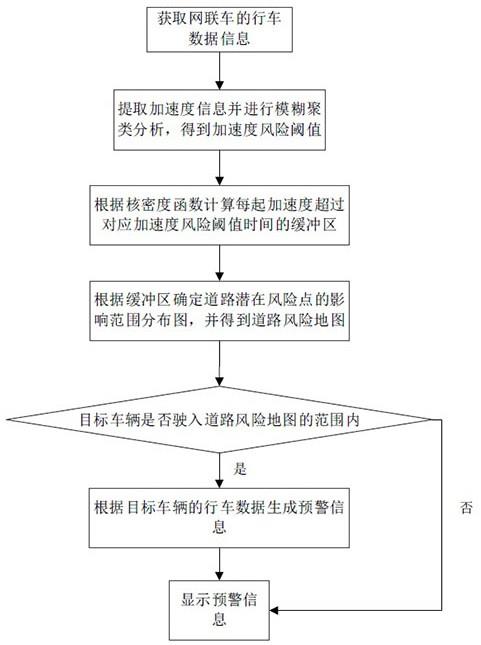
24.图1为本发明一实施例的基于智能网联环境的事故高发点辨识预警方法的流程示意图;图2为本发明一实施例的基于智能网联环境的事故高发点辨识预警系统的结构示意图。
具体实施方式
25.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
26.如图1所示,一种基于智能网联环境的事故高发点辨识预警方法,包括如下步骤:s1:获取网联车的行车数据信息,基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图;s2:获取目标车辆的行车数据信息,判断所述目标车辆是否驶入所述道路风险地图的范围内;s3:在所述目标车辆驶入所述道路风险地图的范围内时根据所述目标车辆的行车数据信息生成预警信息并发送到所述目标车辆的车载显示设备。
27.本发明的基于智能网联环境的事故高发点辨识预警方法,通过获取的海量网联车的行车数据信息,并基于行车数据信息进行模糊聚类分析,得到道路风险地图,并在目标车辆进入道路风险地图的范围内时根据目标车辆的行车数据信息生成预警信息,弥补目前依靠静态黑点数据对交通事故进行预警的单一、低效的问题,实现对车辆的行车数据进行动态跟踪分析,增强驾驶员对道路潜在风险的感知能力,具有智能高效的特点,对交通安全有
一定的保障,能够减少事故带来的人员以及经济损失。
28.在本发明的一个或多个实施例中,所述s1中,所述基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图具体包括如下步骤:s11:根据网联车的所述行车数据信息读取行车的横向加速度、纵向加速度和轴向加速度;可以理解的是,本实施例中的行车数据,是在车辆行驶过程中采集并存储在云端的海量数据,具体可以通过在车辆上安装加速度传感器设备,利用车辆obd接口或者蜂窝通信网口与运算控制系统建立通信连接,以获取车辆的加速度信息。
29.需要指出的是,为了后续确定风险路段的位置,需要通过定位导航装置来获取车辆的位置信息。
30.s12:对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值;s13:根据所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值从所述行车数据信息中读取每起超过对应风险加速度阈值的事件,并在地理信息系统中标出作为点状对象;s14:根据核密度估计函数得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图,并基于所述地理信息系统对每起超过对应风险加速度阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图。
31.通过对网联车的行车数据信息中的横向加速度、纵向加速度和轴向加速度分别进行模糊聚类分析,并通过对应加速度之间的亲疏关系确定用来表征亲疏关系的统计量,从而对不同的加速度信息进行分类,从而确定对应加速度的风险阈值,并计算每起超过对应风险阈值的事件的缓冲区,最终得到道路风险地图,以便于对驾驶员进行提醒。
32.在本发明的一个或多个实施例中,所述s12中,所述对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析具体包括如下步骤:s121:构建模糊聚类分析目标函数,并求解最优解,得到每个数据点到对应聚类中心类别的隶属度::::其中,jm(u,p)为模糊分类误差,u为原数据矩阵,p为聚类中心,为第k个数据点到第i(i=1,2,
…
,c)类聚类中心的隶属度,d
ik
为样本与第i类中的原型矢量之间的失
真距离,n为数据的个数,c为聚类类别的个数,m为加权指数,为第i类的聚类中心,a为距离权重矩阵,jm(u,p)为模糊分类误差;s122:基于所述原数据矩阵建立模糊相似矩阵,并利用模糊运算生成模糊等价矩阵,并以所述隶属度为权重计算质心进行聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值。
33.通过构建所述模糊聚类分析目标函数计算每个数据点到对应聚类中心类别的隶属度,然后利用模糊运算生成模糊等价矩阵,并基于模糊等价矩阵和隶属度进行聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值,方便后续在对目标车辆的动态跟踪时确定目标车辆对应的加速度是否超过对应的阈值,以实现提醒驾驶员的目的。
34.这里,通过确定横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值,这样,一个或多个加速度超过对应加速度阈值的行车状态即为行车风险状态,对应的路段即为风险路段,对于风险路段越集中的区域可以认定为越容易引发交通事故,将这些区域反映在地图上得到道路风险地图,并储存在云端。
35.在本发明的一个或多个实施例中,所述s14中,所述根据核密度估计函数得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图具体包括如下步骤:s141:分别将每起超过对应加速度阈值的事件在地理信息系统gis中标出,并根据核密度估计函数计算得到每起事件的缓冲区,其中,在每起事件在某一点s处的核密度函数的计算公式如下:其中,为每起事件在点s处的核密度值;为缓冲区半径;为事件点i到事件点s的距离;为没有边界的高斯核函数;s142:利用地理信息系统gis得到道路潜在风险点的影响范围分布图。
36.通过核密度估计函数计算每起超过对应加速度阈值事件的缓冲区的半径,进而得到道路潜在风险点的影响范围分布图,以便对目标车辆进行跟踪和提醒。
37.在本发明的一个或多个实施例中,所述s14中,所述基于所述地理信息系统对每起超过对应阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图具体包括如下步骤:s143:利用地理信息系统对每起超过对应加速度阈值的事件形成的缓冲区进行多边形图层与图层的重叠分析,形成表征道路风险的综合性图层;s144:将所述综合性图层与交通路网进行多边形与线的重叠分析,得到包含风险路段与风险区域的道路风险地图;所述判断所述目标车辆是否驶入所述道路风险地图的范围内具体包括如下步骤:s145:实时获取目标车辆的位置信息,并将所述位置信息与所述道路风险地图进行对比,并在所述目标车辆的位置信息对应的位置位于所述道路风险地图中的风险路段时,确定所述目标车辆驶入所述道路风险地图的范围内。
38.通过对每起超过对应加速度阈值的事件形成的缓冲区进行多边形图层与图层的重叠分析,可以得到对应表征所有道路风险的综合涂层,然后对综合性图层与交通路网进行多边形与线的重叠分析,从而精确得到道路风险地图,作为后续车辆提醒的边界范围,同时,当目标车辆的位置位于道路风险地图的边界范围内时,则对车辆的行车信息进行跟踪,并在加速度超过对应的风险阈值时及时提醒。
39.可以理解的是,所述s2中,在目标车辆行驶过程中,目标车辆的位置信息、加速度信息会实时上传到云端,一方面作为数据分析的数据源,是加速度风险阈值矫正以及道路风险地图生成的基础;另一方面作为风险分析的数据源,用于判断当前车辆是否进入风险路段。
40.由于在前述步骤中已经得到包含风险路段与风险区域的道路风险地图,所以这里,当定位到目标车辆进入道路风险地图内的风险路段,则认为车辆可能发生交通事故的危险,需要进一步对车辆的加速度信息进行分析,包括横向加速度、纵向加速度以及轴向加速度,通过传感器设备采集并上传到云端保留在数据库中,当车辆在安全路段(非风险路段)行驶时,云端只收集车辆的加速度信息留用而不进行风险分析,当定位车辆驶入风险路段即将当前的加速度信息提取出来进行下一步的研究。
41.在本发明的一个或多个实施例中,所述s3中,所述根据所述目标车辆的行车数据信息生成预警信息具体包括如下步骤:s31:根据所述目标车辆的行车数据信息读取所述目标车辆的横向加速度、纵向加速度以及轴向加速度;s32:将所述目标车辆的横向加速度、纵向加速度以及轴向加速度分别与对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值进行比较,并在横向加速度、纵向加速度和/或轴向加速度分别大于对应的所述横向加速度风险阈值、纵向加速度风险阈值和/或轴向加速度风险阈值时生成所述预警信息;其中,所述预警信息至少包括当前区域道路风险地图、横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值。
42.通过将所述目标车辆的横向加速度、纵向加速度以及轴向加速度分别与对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值进行比较,这样可以初步判断驾驶员是否在道路风险地图的边界范围内安全驾驶,并在横向加速度、纵向加速度和/或轴向加速度分别大于对应的所述横向加速度风险阈值、纵向加速度风险阈值和/或轴向加速度风险阈值时进行实时预警,提高驾驶员对潜在的风险路段的感知能力,实时性好。
43.需要额外指出的是,所述预警信息的预警方式包括声光、图像以及安全带震动中的一种或多种。预警信息可以通过车载显示设备或外接的智能设备来进行展示,比如智能手机、平板电脑、pda等智能交互设备。
44.如图2所示,本发明还提供了一种基于智能网联环境的事故高发点辨识预警系统,包括道路风险地图模块、判断获取模块和预警模块;所述道路风险地图模块,用于获取网联车的行车数据信息,基于所述行车数据信息分析行车风险加速度阈值,并确定道路风险地图;所述判断获取模块,用于获取目标车辆的行车数据信息,判断所述目标车辆是否
驶入所述道路风险地图的范围内;所述预警模块,用于在所述目标车辆驶入所述道路风险地图的范围内时根据所述目标车辆的行车数据信息生成预警信息并发送到所述目标车辆的车载显示设备。
45.本发明的基于智能网联环境的事故高发点辨识预警系统,通过获取的海量网联车的行车数据信息,并基于行车数据信息进行模糊聚类分析,得到道路风险地图,并在目标车辆进入道路风险地图的范围内时根据目标车辆的行车数据信息生成预警信息,弥补目前依靠静态黑点数据对交通事故进行预警的单一、低效的问题,实现对车辆的行车数据进行动态跟踪分析,增强驾驶员对道路潜在风险的感知能力,具有智能高效的特点,对交通安全有一定的保障,能够减少事故带来的人员以及经济损失。
46.在本发明的一个或多个实施例中,所述道路风险地图模块具体包括:数据读取子模块,用于根据网联车的所述行车数据信息读取行车的横向加速度、纵向加速度和轴向加速度;数据预处理子模块,用于对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值;事件读取子模块,用于根据所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值从所述行车数据信息中读取每起超过对应风险加速度阈值的事件,并在地理信息系统中标出作为点状对象;道路风险地图子模块,用于根据核密度估计函数计算得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图,并基于所述地理信息系统对每起超过对应风险加速度阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图。
47.通过对网联车的行车数据信息中的横向加速度、纵向加速度和轴向加速度分别进行模糊聚类分析,并通过对应加速度之间的亲疏关系确定用来表征亲疏关系的统计量,从而对不同的加速度信息进行分类,从而确定对应加速度的风险阈值,并计算每起超过对应风险阈值的事件的缓冲区,最终得到道路风险地图,以便于对驾驶员进行提醒。
48.在本发明的一个或多个实施例中,所述数据预处理子模块对所述横向加速度、纵向加速度、轴向加速度分别进行模糊聚类分析的具体实现为:构建模糊聚类分析目标函数,并求解最优解,得到每个数据点到对应聚类中心类别的隶属度::::
其中,jm(u,p)为模糊分类误差,u为原数据矩阵,p为聚类中心,为第k个数据点到第i(i=1,2,
…
,c)类聚类中心的隶属度,d
ik
为样本与第i类中的原型矢量之间的失真距离,n为数据的个数,c为聚类类别的个数,m为加权指数,为第i类的聚类中心,a为距离权重矩阵,jm(u,p)为模糊分类误差;基于所述原数据矩阵建立模糊相似矩阵,并利用模糊运算生成模糊等价矩阵,并以所述隶属度为权重计算质心进行聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值。
49.通过构建所述模糊聚类分析目标函数计算每个数据点到对应聚类中心类别的隶属度,然后利用模糊运算生成模糊等价矩阵,并基于模糊等价矩阵和隶属度进行聚类分析,得到对应的横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值,方便后续在对目标车辆的动态跟踪时确定目标车辆对应的加速度是否超过对应的阈值,以实现提醒驾驶员的目的。
50.在本发明的一个或多个实施例中,所述道路风险地图子模块根据核密度估计函数得到每起事件的缓冲区,得到道路潜在风险点的影响范围分布图的具体实现为:分别将每起超过对应加速度阈值的事件在地理信息系统gis中标出,并根据核密度估计函数计算得到每起事件的缓冲区,其中,在每起事件在某一点s处的核密度函数的计算公式如下:其中,为每起事件在点s处的核密度值;为缓冲区半径;为事件点i到事件点s的距离;为没有边界的高斯核函数;利用地理信息系统gis得到道路潜在风险点的影响范围分布图。
51.通过核密度估计函数计算每起超过对应加速度阈值事件的缓冲区的半径,进而得到道路潜在风险点的影响范围分布图,以便对目标车辆进行跟踪和提醒。
52.在本发明的一个或多个实施例中,所述道路风险地图子模块基于所述地理信息系统对每起超过对应阈值的事件形成的缓冲区进行处理,得到包含风险路段与风险区域的道路风险地图的具体实现为:利用地理信息系统对每起超过对应加速度阈值的事件形成的缓冲区进行多边形图层与图层的重叠分析,形成表征道路风险的综合性图层;将所述综合性图层与交通路网进行多边形与线的重叠分析,得到包含风险路段与风险区域的道路风险地图。
53.在本发明的一个或多个实施例中,所述判断获取模块判断所述目标车辆是否驶入所述道路风险地图的范围内的具体实现为:实时获取目标车辆的位置信息,并将所述位置信息与所述道路风险地图进行对比,并在所述目标车辆的位置信息对应的位置位于所述道路风险地图中的风险路段时,确定所述目标车辆驶入所述道路风险地图的范围内。
54.通过对每起超过对应加速度阈值的事件形成的缓冲区进行多边形图层与图层的
重叠分析,可以得到对应表征所有道路风险的综合涂层,然后对综合性图层与交通路网进行多边形与线的重叠分析,从而精确得到道路风险地图,作为后续车辆提醒的边界范围,同时,当目标车辆的位置位于道路风险地图的边界范围内时,则对车辆的行车信息进行跟踪,并在加速度超过对应的风险阈值时及时提醒。
55.在本发明的一个或多个实施例中,在目标车辆上设置有加速度传感组件和卫星定位导航组件,所述加速度传感组件,用于获取目标车辆的行车数据信息,包括横向加速度、纵向加速度和轴向加速度,所述卫星定位导航组件用于获取车辆的实时位置信息,这些信息被采集后都会上传至云端服务器,以便判断模块获取。
56.所述判断获取模获取目标车辆的行车数据后,读取目标车辆的实时位置信息,并根据目标车辆的实时位置信息判断所述目标车辆是否驶入所述道路风险地图的范围内。
57.在本发明的一个或多个实施例中,所述预警模块根据所述目标车辆的行车数据信息生成预警信息的具体实现为:根据所述目标车辆的行车数据信息读取所述目标车辆的横向加速度、纵向加速度以及轴向加速度;将所述目标车辆的横向加速度、纵向加速度以及轴向加速度分别与对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值进行比较,并在横向加速度、纵向加速度和/或轴向加速度分别大于对应的所述横向加速度风险阈值、纵向加速度风险阈值和/或轴向加速度风险阈值时生成所述预警信息;其中,所述预警信息至少包括当前区域道路风险地图、横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值。
58.通过将所述目标车辆的横向加速度、纵向加速度以及轴向加速度分别与对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值进行比较,这样可以初步判断驾驶员是否在道路风险地图的边界范围内安全驾驶,并在横向加速度、纵向加速度和/或轴向加速度分别大于对应的所述横向加速度风险阈值、纵向加速度风险阈值和/或轴向加速度风险阈值时进行实时预警,提高驾驶员对潜在的风险路段的感知能力,实时性好。
59.需要指出的是,当所述横向加速度、纵向加速度以及轴向加速度分别小于对应的所述横向加速度风险阈值、纵向加速度风险阈值和轴向加速度风险阈值时,系统仍然会提示包含有当前区域道路风险地图的预警信息,以提醒驾驶员小心驾驶。
60.另外,本发明的实施例中,所述预警信息除了通过车载显示设备进行显示外,还可以通过与云端通信连接的智能终端进行提醒,比如智能手机、平板电脑和pda等数据交互设备。
61.本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现权利要求所述的基于智能网联环境的事故高发点辨识预警方法。
62.本发明还提供了一种基于智能网联环境的事故高发点辨识预警设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的基于智能网联环境的事故高发点辨识预警方法的步骤。
63.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和
原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1