船舶监视系统、船舶监视方法、信息处理装置以及程序与流程
1.本发明涉及船舶监视系统、船舶监视方法、信息处理装置以及程序。
背景技术:
2.以往,存在评估船舶彼此碰撞的风险的各种方法。例如,非专利文献1公开了显示ozt(obstacle zone by target,目标障碍区)的方法。
3.现有技术文献
4.专利文献
5.非专利文献1:今津隼马,福戸淳司,沼野正义,“关于对方船引起的妨碍区及其显示”,日本航海学会论文集,2002年,vol.107,p.191-197。
技术实现要素:
6.发明要解决的问题
7.然而,在以往的方法中,针对多个其他船分别评估碰撞的风险,在多个其他船形成一个船队的情况下,即使碰撞风险低的其他船包括在船队中,也需要避开整个船队。
8.本发明是鉴于上述问题而完成的,其主要目的在于,提供一种能够针对形成船队的多个其他船适当地评估碰撞风险的船舶监视系统、船舶监视方法、信息处理装置以及程序。
9.用于解决问题的手段
10.为了解决上述课题,本发明的一方面的船舶监视系统具有:第一数据生成部,生成表示第一船舶的位置和速度的第一船舶数据;第二数据生成部,生成表示多个第二船舶的位置和速度的多个第二船舶数据;风险值计算部,根据所述第一船舶数据以及所述多个第二船舶数据,分别算出表示所述第一船舶与所述多个第二船舶分别碰撞的风险的风险值;船队判定部,根据所述多个第二船舶数据,判定所述多个第二船舶是否为船队;以及代表值选出部,从针对判定为船队的所述多个第二船舶分别算出的所述风险值中选出代表值。
11.另外,本发明的另一方面的船舶监视方法,通过第一数据生成部生成表示第一船舶的位置和速度的第一船舶数据,通过第二数据生成部生成表示多个第二船舶的位置和速度的多个第二船舶数据,根据所述第一船舶数据以及所述多个第二船舶数据,分别算出表示所述第一船舶与所述多个第二船舶分别碰撞的风险的风险值,根据所述多个第二船舶数据,判定所述多个第二船舶是否为船队,从针对判定为船队的所述多个第二船舶分别算出的所述风险值中选出代表值。
12.另外,本发明的另一方面的信息处理装置具有:风险值计算部,根据表示第一船舶的位置和速度的第一船舶数据以及表示多个第二船舶的位置和速度的多个第二船舶数据,分别算出表示所述第一船舶与所述多个第二船舶分别碰撞的风险的风险值;船队判定部,根据所述多个第二船舶数据,判定所述多个第二船舶是否为船队;以及代表值选出部,从针对判定为船队的所述多个第二船舶分别算出的所述风险值中选出代表值。
13.另外,本发明的另一方面的程序使计算机执行以下步骤:根据表示第一船舶的位置和速度的第一船舶数据以及表示多个第二船舶的位置和速度的多个第二船舶数据,分别算出表示所述第一船舶与所述多个第二船舶分别碰撞的风险的风险值;根据所述多个第二船舶数据,判定所述多个第二船舶是否为船队;以及从针对判定为船队的所述多个第二船舶分别算出的所述风险值中选出代表值。
14.发明的效果
15.根据本发明,能够针对形成船队的多个其他船适当地评估碰撞风险。
附图说明
16.图1是表示实施方式的船舶监视系统的构成例的图。
17.图2是表示其他船管理数据库的例子的图。
18.图3是表示ozt的显示例(以往例)的图。
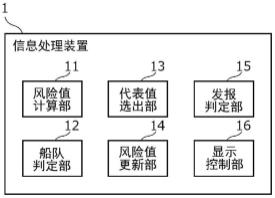
19.图4是表示实施方式的信息处理装置的构成例的图。
20.图5是表示船队管理数据库的例子的图。
21.图6是表示发报判定处理的步骤例的图。
22.图7是表示发报判定例的图。
23.图8是表示风险值更新和显示处理的步骤例的图。
24.图9是表示风险值更新例的图。
25.图10是表示显示例的图。
具体实施方式
26.以下,参照附图对本发明的实施方式进行说明。
27.图1是表示实施方式的船舶监视系统100的构成例的框图。船舶监视系统100是搭载于船舶且用于监视在周围存在的船舶的系统。
28.搭载了船舶监视系统100的船舶为第一船舶的例子,在以下的说明中,称为“本船”。另外,在本船的周围存在的船舶为第二船舶的例子,在以下的说明中,称为“其他船”。
29.另外,在以下的说明中,“速度”为表示速率和方位的矢量(所谓的船速矢量),“速率”为标量。
30.船舶监视系统100具有信息处理装置1、显示部2、雷达3、ais4、gnss接收机5、陀螺罗盘6、ecdis7以及警报部8。这些设备例如与lan等网络n连接,能够相互进行网络通信。
31.信息处理装置1是包括cpu、ram、rom、非易失性存储器以及输入输出接口等的计算机。信息处理装置1的cpu按照从rom或非易失性存储器加载到ram中的程序来执行信息处理。
32.程序可以例如通过光盘或存储卡等信息存储介质来供给,也可以例如通过因特网或lan等通信网络来供给。
33.显示部2例如为带触摸传感器的显示装置。触摸传感器检测手指等在画面内的指示位置。不限于触摸传感器,也可以通过轨迹球等输入指示位置。
34.雷达3向本船的周围发出电波并接收其反射波,基于接收信号生成回波数据。另外,雷达3根据回波数据识别物体目标,生成表示物体目标的位置和速度的物体目标跟踪数
据(tt数据)。
35.ais(automatic identification system,自动识别系统)4从在本船的周围存在的其他船或陆地管制接收ais数据。并不限于ais,也可以使用vdes(vhf data exchange system,vhf数据交换系统)。ais数据包括其他船的位置和速度等。
36.gnss接收机5基于从gnss(global navigation satellite system,全球导航卫星系统)接收的电波检测本船的位置。陀螺罗盘6检测本船的方位。并不限于陀螺罗盘,也可以使用gps罗盘或磁罗盘。
37.ecdis(electronic chart display and information system,电子海图显示与信息系统)7从gnss接收机5获取本船的位置,在电子海图上显示本船的位置。另外,ecdis7在电子海图上也显示本船的预定航路。并不限于ecdis,也可以使用gnss绘图仪。
38.警报部8在本船与其他船存在碰撞风险的情况下发出警报。警报部8例如可以是显示的警报,也可以是声音或光的警报。显示的警报可以在显示部2中进行。即,显示部2也可以兼作警报部8。
39.本实施方式中,信息处理装置1是独立的设备,但不限于此,也可以与ecdis7等其他装置一体。即,信息处理装置1的功能部也可以通过ecdis7等其他装置来实现。
40.另外,显示部2也是独立的装置,但不限于此,ecdis7等其他装置的显示部也可以作为显示由信息处理装置1生成的图像的显示部2使用。
41.本实施方式中,gnss接收机5和ecdis7的组为第一数据生成部的例子,生成表示本船的位置和速度的本船数据。具体而言,gnss接收机5检测本船的位置,并且,ecdis7根据本船的位置的时间变化检测本船的速度。
42.并不限于此,本船的速度也可以根据由陀螺罗盘6检测的本船的方位和由未图示的船速计检测的本船的速率来检测。
43.另外,雷达3或ais4为第二数据生成部的例子,生成表示其他船的位置和速度的其他船数据。具体而言,由雷达3生成的tt数据相当于其他船数据。另外,由ais4生成的ais数据也相当于其他船数据。
44.图2是表示信息处理装置1的存储器中构建的其他船管理数据库的例子的图。在其他船管理数据库中登记有由雷达3或ais4生成的其他船数据。
45.其他船管理数据库包括“其他船标识”、“位置”、“速率”以及“方位”等字段。此外,由雷达3检测的其他船的位置以及方位被转换为与gnss相同的坐标系。
46.图3是表示ozt的显示例(以往例)的图。ozt是本船的航行受到其他船妨碍的区域,显示在其他船的预定航向上。
47.另外,如该图所示,当存在包括碰撞风险高的其他船的船队时,需要避开整个船队,而不是仅避开碰撞风险高的其他船。
48.然而,在以往的碰撞警报中,分别对其他船评估碰撞风险,并分别发出警报,因此,如该图所示,有可能仅向船队中包括的一部分其他船发出警报,而不向剩余的其他船发出警报。
49.因此,在本实施方式中,如下所述,将多个其他船作为船队进行管理,实现了对整个船队发出警报。
50.图4是表示实施方式的信息处理装置1的构成例的框图。信息处理装置1具有风险
值计算部11、船队判定部12、代表值选出部13、风险值更新部14、发报判定部15以及显示控制部16。这些功能部通过信息处理装置1的cpu按照程序执行信息处理来实现。
51.图5是用于对通过船队判定部12判定为船队的多个其他船进行管理的船队管理数据库的例子的图。船队管理数据库包括“船队标识”、“其他船标识”以及“风险值”等字段。需要说明的是,也可以将船队管理数据库整合为上述其他船管理数据库(参照图2)。
[0052]“船队标识”为用于识别船队的标识。对通过船队判定部12判定为船队的多个其他船赋予相同的船队标识。“风险值”表示通过风险值计算部11算出的风险值或通过风险值更新部14更新的风险值。
[0053]
图6是表示在船舶监视系统100中实现的实施方式的船舶监视方法中的发报判定处理的步骤例的流程图。信息处理装置1按照程序执行该图所示的信息处理。图7是表示发报判定例的图。
[0054]
首先,信息处理装置1根据本船数据以及其他船数据分别算出表示本船与多个其他船分别碰撞的风险的风险值(s11:作为风险值计算部11的处理)。
[0055]
例如使用用于显示ozt(obstacle zone by target,目标障碍区)的公知方法算出风险值。在该方法中,对于在其他船的预测航向上设定的多个判定点,假定本船转向并到达各判定点时,对本船与其他船碰撞的风险进行评估。
[0056]
并不限于此,例如也可以应用使用tcpa(time to closest point of approach,到达最接近点的时间)/dcpa(distance to closest point of approach,到达最接近点的距离)的方法算出风险值,也可以应用使用sj(subject judgement,主观判断)值的方法。
[0057]
然后,信息处理装置1根据其他船数据判定多个其他船是否为船队(s12:作为船队判定部12的处理)。具体而言,信息处理装置1从检测的其他船中例如将位置、速率以及方位等较近的多个其他船分组为一个船队。例如,信息处理装置1将在以本船为中心的规定的范围内其位置和速度为规定的差异以下且其状态持续规定的时间以上的多个其他船分组为一个船队。
[0058]
当判定为多个其他船为船队时(s12:是),信息处理装置1从针对判定为船队的多个其他船分别算出的风险值中选出最大值(s13:作为代表值选出部13的处理)。并不限于最大值,也可以选出平均值等代表值。
[0059]
具体而言,信息处理装置1从船队管理数据库(参照图5)中赋予相同的船队标识的其他船的风险值中选出最大值。在图7的例子中,判定为船队的三个其他船中的位于最左侧的其他船的风险值为0.7,为最大值。
[0060]
然后,信息处理装置1在风险值的最大值为阈值以上的情况下,对船队发出警报(s14,s15:作为发报判定部15的处理)。即,只要判定为船队的多个其他船中的任意一艘的风险值为阈值以上,就对船队发出警报。
[0061]
对船队发出警报是指对判定为船队的多个其他船全部发出警报。即,不仅对判定为船队的多个其他船中的风险值为最大值的其他船发出警报,对除此之外的其他船也发出警报。因此,即使是像图7的例子中位于最右侧的其他船那样的单独的风险值小于阈值的其他船,只要判定为船队就发出警报。
[0062]
发出警报例如通过在兼作警报部8的显示部2中改变判定为船队的多个其他船的符号的颜色等、使其亮灭或者进行附加表示其为警报对象的框等强调显示来实现。
[0063]
根据以上说明的步骤,由于对整个船队发出警报,因此,容易采取避开整个船队的回避行动。
[0064]
此外,在判定为多个其他船不是船队的情况下(s12:否),信息处理装置1对各个其他船进行发报判定。即,在判定为船队的的情况下,如上所述对船队进行发报判定,在判定为不是船队的情况下,与以往同样地,对各个其他船进行发报判定。
[0065]
图8是表示在船舶监视系统100中实现的实施方式的船舶监视方法中的风险值更新和显示处理的步骤例的流程图。信息处理装置1按照程序执行该图所示的信息处理。图9是表示风险值更新例的图。图10是表示显示例的图。
[0066]
首先,信息处理装置1分别算出本船与多个其他船分别碰撞的风险值,并且判定多个其他船是否为船队,从针对判定为船队的多个其他船算出的风险值中选出最大值(s21~s23)。该处理与上述s11~s13同样。
[0067]
然后,信息处理装置1使判定为船队的多个其他船中的除风险值为最大值的其他船以外的其他船的风险值增加(s24:作为风险值更新部14的处理)。
[0068]
具体而言,信息处理装置1使除风险值为最大值的其他船以外的其他船(以下,称为更新目标其他船)的风险值在不超出该最大值的范围内增加,并更新船队管理数据库(参照图5)中记录的风险值。
[0069]
更新目标其他船的修正后的风险值例如通过如下所述的加权平均来算出。
[0070]
修正后的风险值=(0.7
×
风险值的最大值)
×
(0.3
×
更新目标其他船
×
风险值)
[0071]
需要说明的是,修正方法、权重系数等并不限于此。
[0072]
在图9的例子中,判定为船队的三个其他船中的位于最左侧的其他船的风险值为0.7,为最大值。位于中央的其他船的风险值为0.6,位于最右侧的其他船的风险值为0.3,这些为更新目标其他船。
[0073]
通过针对更新目标其他船更新基于上述式的风险值,位于中央的其他船的风险值从0.6增加到0.67,位于最右侧的其他船的风险值从0.3增加到0.58。
[0074]
由此,即使是图9的例子中位于最右侧的其他船那样的在更新前风险值小于阈值的其他船,由于被判定为船队,风险值也会增加,因此容易发出警报。
[0075]
然后,信息处理装置1生成显示用图像,并将其输出给显示部2(s25:作为显示控制部16的处理)。
[0076]
图10是表示在显示部2中显示的显示用图像的例子的图。在显示用图像中,识别并显示判定为船队的多个其他船。即,属于船队的多个其他船以能够识别为不属于船队的其他船的方式显示。例如,如该图所示,判定为船队的多个其他船可以被表示船队的框包围,也可以改变颜色等。
[0077]
另外,在显示用图像中,在判定为船队的多个其他船的各预测航路上配置有ozt,也可以将这些ozt一体显示。具体而言,显示包围多个ozt的整合ozt。整合ozt例如通过以面积达到最大的方式连接多个ozt的接线来形成。
[0078]
如此地,通过识别并显示判定为船队的多个其他船,能够在视觉上容易识别船队。进一步,通过显示整合ozt,能够在视觉上容易识别用于避开船队的可航行区域。
[0079]
以上,说明了本发明的实施方式,本发明并不限定于以上说明的实施方式,当然本领域技术人员能够进行各种变更。
[0080]
附图标记说明
[0081]
1信息处理装置、2显示部、3雷达、4ais、5gnss接收机、6陀螺罗盘、7ecdis、8警报部、11风险值计算部、12船队判定部、13代表值选出部、14风险值更新部、15发报判定部、16显示控制部、100船舶监视系统
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1