车辆控制方法及车辆控制装置与流程
本发明涉及一种车辆控制方法及车辆控制装置。
背景技术:
1、例如,在下述专利文献1中记载了避开本车辆的周围的物体而使本车辆行驶的行驶控制装置。
2、现有技术文献
3、专利文献
4、专利文献1:国际公开第2016/024315号
5、本发明要解决的课题
6、但是,如果在自动避开物体时发生较大的舵角变化,则方向盘可能会大幅度移动而给乘员带来不适感。
技术实现思路
1、本发明的目的在于抑制自动避开物体时发生的过大的舵角变化。
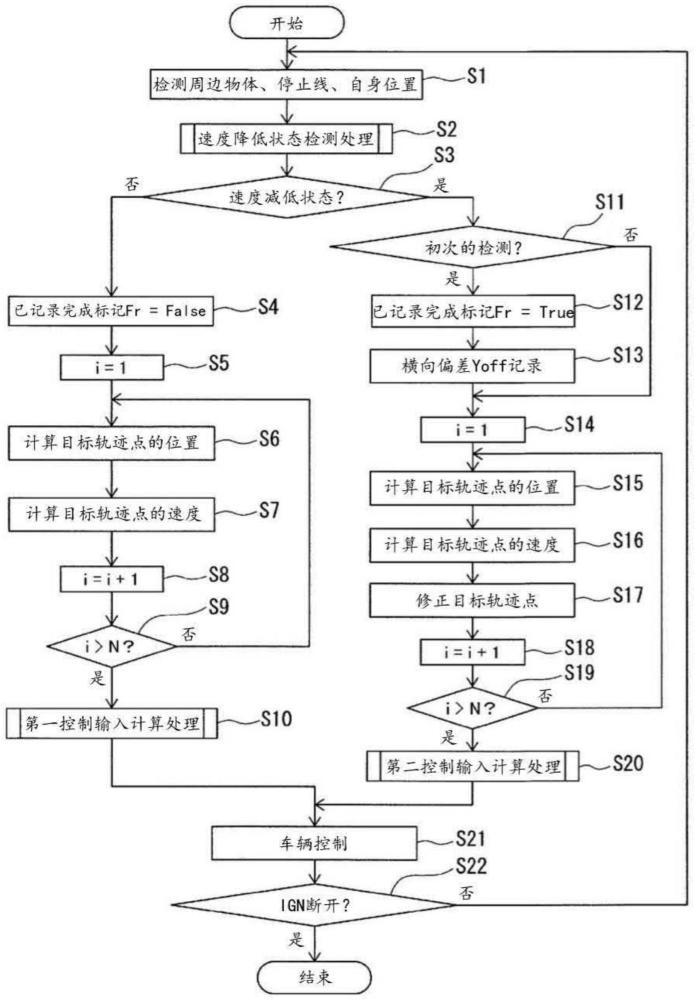
2、在本发明的一方式的车辆控制方法中,使控制器执行如下处理:检测本车辆的车速降低到小于规定的速度阈值的时刻即车速降低时刻的处理;检测本车辆相对于车道中央或车道边界线的横向偏差的处理;以维持在车速降低时刻检测出的横向偏差的方式生成本车辆的第一目标行驶轨迹的处理;检测本车辆应避开的避开对象物的处理;在车速降低时刻之后,通过使本车辆沿着第一目标行驶轨迹行驶的同时调整本车辆的加减速度从而避开避开对象物的处理。
3、发明效果
4、根据本发明,能够抑制自动避开物体时发生的过大的舵角变化。
技术特征:
1.一种车辆控制方法,其特征在于,使控制器执行如下处理:
2.如权利要求1所述的车辆控制方法,其特征在于,
3.如权利要求2所述的车辆控制方法,其特征在于,
4.如权利要求2或3所述的车辆控制方法,其特征在于,
5.如权利要求1~4中任一项所述的车辆控制方法,其特征在于,
6.如权利要求1~5中任一项所述的车辆控制方法,其特征在于,
7.一种车辆控制装置,其特征在于,具备执行如下处理的控制器,
技术总结
本发明的车辆控制方法中,使控制器(16)执行如下处理:判定本车辆的车速是否降低到小于规定的速度阈值的车速判定处理(S2);检测本车辆相对于车道中央或车道边界线的横向偏差的横向偏差检测处理(S10);在判定为车速降低到小于速度阈值的情况下,以抑制在车速降低到小于速度阈值的时刻即车速降低时刻以后的横向偏差的变化的方式生成本车辆的第一目标行驶轨迹的目标轨迹生成处理(S13);检测本车辆应避开的避开对象物的避开对象物检测处理(S1);在车速降低时刻之后,通过使本车辆沿着第一目标行驶轨迹行驶的同时调整本车辆的减速度来避开避开对象物的避开处理(S14)。
技术研发人员:江本周平
受保护的技术使用者:日产自动车株式会社
技术研发日:
技术公布日:2024/3/31
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1