一种基于张力的电子围栏的制作方法
1.本发明属于安防技术领域,具体涉及一种基于张力的电子围栏。
背景技术:
2.现代电子围栏装置可以辨别出哪些是恶意入侵哪些是无意入侵。并能够拦阻智能识别出入侵的位置,不会给入侵者带来致命伤害。电子围栏连接的脉冲主机电压输出符合各种国际标准/国家标准指标,低频低能量高电压的脉冲电压(五千伏至一万伏),电压作用人员肉体的时间极短,不会给入侵者造成伤害,脉冲电压可通过脉冲电子围栏主机随意调节,适用于各种不同防范等级要求的场所。
3.绝大多数的电子围栏系统仍处于单设备分散管理,而且一旦出现报警情况,警报信号只能停留在前端,在接入前端时,不论是出现拉紧、松弛、断线都只会输出一种开关量信号出来,只能检测出是否报警,无法区分其报警状态,当报警发生时,无法确定是有人入侵或者是围栏被破坏,不利于掌握确切的信息从而做出准确的响应。
技术实现要素:
4.本发明的目的是为了解决背景技术中所提出的问题,而提供一种基于张力的电子围栏,在前端使用多种探测手段,同时把各种传感器组成传感网,通过融合算法进行数据分析,提高报警的准确性和可靠性。
5.本发明的目的是这样实现的:一种基于张力的电子围栏,包括围墙,包括:物理层,包括张力围栏单元、视频联动单元和报警单元,当检测到围栏单元发生入侵异常时,将报警信号通过串口传送给视频联动单元,视频联动单元根据接收到的串口数据进行指令解析,再决策是否开启视频采集,所述的张力围栏单元和视频联动单元均连接至报警单元;传感层,包括设于张力围栏单元内的传感器组件,实时检测到围栏单元的状态,并将检测的信号传送到围栏主机;控制层,包括设于围墙上的围栏主机和用于控制围栏主机、视频联动单元和报警单元的上位机,所述的围栏单元由围栏主机控制,实时读取采集由物理层和传感层发送来的数据,并进行分析;网络层,通过互联网和云系统将物理层的前端数据实时传输分析处理并上传至上位机。
6.优选的,所述的报警单元包括报警主机、报警模块和报警器,所述的报警主机接收来自传感层的监测数据,并将检测数据通过网络层连接至上位机,所述报警主机通过报警模块对监测数据进行分析处理,并根据处理结果启动或关闭报警器,所述的报警器设于围墙上,所述的报警模块包括:拉紧警报模块,检知到的拉力大于设定阈值的上限一段时间,则判断出现拉紧异
常并发出警报;松弛警报模块,检知到的拉力低于设定阈值一段时间,则判断出现松弛异常并发出警报;断路警报模块,出现信号终断时,则判断出现断路异常并发出警报;围栏主机开盒警报模块,检知到围栏主机被人为非法拆开,则判断出现防拆异常并发出警报;自检及故障报警模块,具有自检、自诊断能力,且具有设备故障报警功能。
7.优选的,所述的围栏单元包括通过底座设于围墙上的控制杆和通过底座均匀排设控制杆两侧的若干张力杆,所述的若干张力杆通过张力索连接至控制杆,所述的控制杆的两侧设有张力弹簧,所述的张力索依次穿过张力杆并通过张力弹簧连接至控制杆,在围墙的拐角处设有用于连接张力索的转向杆。
8.优选的,所述的张力杆的外部固定连接有用于限位张力索的线夹,所述张力杆的顶部设有用于防雨的防雨帽,所述张力索上均设有紧线器,用于调节张力索的张弛程度,所述的张力索上还穿设有警示牌;所述的围栏单元还包括避雷器,所述避雷器的正面接张力杆的外部,所述避雷器的反面通过接地线接到大地,所述的接地线靠近地面的一端通过接地桩固定入地面;所述转向杆的底部通过底座固定连接至围墙上,所述的转向杆的外部、对应张力索处设有供张力索转向的转向滑轮;所述的围栏主机固定于围墙的墙壁上,所述围栏主机的外部设有防雨箱。
9.优选的,所述的传感器组件包括:张力传感器,设于控制杆内,通过张力弹簧与对应的张力索连接,用于检测张力索张力变化,每一张力索对应一个张力传感器;惯性传感器,以每隔2-3米通过张力索串联成组敷设在围栏上,采集入侵信号并输入至围栏主机分析或直接输入报警主机进行分析,所述的惯性传感器安设于普通防区内;振动传感器,附在张力索上,感测到由张力索表面传来的微弱压力和形变,采集入侵信号并传输至围栏主机,所述的振动传感器安设于重点防区内。
10.优选的,所述的视频联动单元包括摄像机,所述的摄像机内设有视频移动探测器,对摄像机产生的图像进行电子分析以检车图像的变化程度,所述的摄像机与传感器组联动。
11.优选的,所述的惯性传感器在检测入侵信号时,包括如下三种类型:s1、攀爬围栏入侵,惯性传感器内的计时器从最开始的一次碰触开始计时,攀爬时间计时器计算由攀爬行为引起的能量积累,在预设的累计时间内,如果攀爬碰触的次数超过设定参数,系统就会显示有入侵发生;s2、剪断围栏,当围栏单元的结构被剪切破坏时,初始振幅信号超过剪切门限;任何一次超过门限信号都会当作剪切事件被记录下来,同时,剪切的次数也会被累加;当在一定的时间限制内,剪切次数积累到设定的数量,系统就会判定为一次入侵企图;如果剪切次数在时间窗内没有超过限制,计数器复位;如果超过限制,系统识别为一次剪切警报;s3、短路、断路入侵,根据惯性传感器是否一直处于断开或闭合状态判断是否有断路或短路情况发生。
12.优选的,在类型s1中,具体的有:
a1、当惯性传感器断开的时间大于预先设定的攀爬强度门限;a2、攀爬时间大于预设的攀爬时间门限;a3、攀爬时间在一定时间限制内进行累计,当任一情况发生时,即判断为入侵者攀越或爬过围栏;优选的,在类型s2中,具体的有:b1、惯性传感器断开的时间大于预先设定的剪切强度门限;b2、超过剪切门限次数大于预设的剪切次数;b3、超过剪切门限的剪切次数发生在一定时间之内;优选的,所述的传感器组件还包括有气象传感器,以避免恶劣天气造成的误报。
13.优选的,所述的视频联动单元还包括主控模块、视频采集模块、视频处理模块、显示模块和串口模块,所述视频联动单元各模块的工作流程如下:主控模块,从初始化工作开始,先解析用户输入的命令,设定基本的编解码参数,包括编解码标准,视频格式大小,数据要保存的文件名,再创建同步机制;视频采集模块,前端采用cdd摄像头完成视频采集,采集到一帧数据上传到主控模块进行模数转换,转换完成后,视频采集模块将从内核空间取走一帧数据,在同时也通知视频处理模块及显示模块取走缓冲区中的一帧数据,进行视频的处理和显示;视频处理模块,完成对dsp端图像处理算法的调用,包括视频的编解码算法以及图像处理算法;显示模块,完成视频处理模块处理过的视频缓存区的数据传送给上位机并显示;串口模块,完成与围栏单元之间的交互,当围栏单元发生报警时向报警主机发出报警信号,报警主机根据串口接收到的数据,进行指令解析判断是否开启视频监控、录像保存及运动检测,并向围栏单元发出应答信号。
14.与现有技术相比,本发明的有益效果在于:1、本发明提供的一种基于张力的电子围栏,利用前段的传感器组对入侵目标进行探测,报警单元和视频联动单元可是实现报警复核以及移动侦测功能,其中视频联动单元主要利用对视频的实时分析来实现触发报警功能。
15.2、本发明提供的一种基于张力的电子围栏,围栏单元和视频联动单元联动功能的实现使系统不仅可以有效地感知入侵,也使系统具备了视频重点监控、运动目标监测以及识别、录像保存等能力,不仅有效的克服了传统周界报警系统存在的报警后无法取证的缺点,而且可以准确的识别出具体的入侵对象及其趋势,在感知入侵的同时,便于对入侵者进行监控和取证,有效提高的安保人员对于区域突发事件的处理能力。
16.3、本发明提供的一种基于张力的电子围栏,把电子围栏和入侵检测技术进行了融合,既实现了物理防御,又实现了技术防御,任何的翻越,攀爬,拉扯行为都会触发报警,有超高的敏感性,同时误报率较低,不会受环境的影响,如果将物体拉扯或者压在围栏的体重控制在某个区间以下,会防止许多不必要的报警。
附图说明
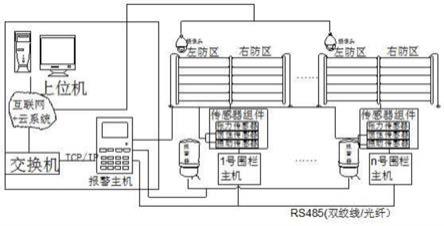
17.图1是本发明一种基于张力的电子围栏结构示意图。
18.图2是本发明一种基于张力的电子围栏的围栏单元示意图。
19.图3是本发明一种基于张力的电子围栏的围栏单元的围栏前端示意图。
20.图4是本发明一种基于张力的电子围栏的控制杆示意图。
21.图5是本发明一种基于张力的电子围栏的张力杆示意图。
22.图6是本发明一种基于张力的电子围栏的围栏单元和视频联动单元联合工作流程图。
23.图7是本发明一种基于张力的电子围栏的振动传感器的电路图。
24.图中:1、围栏主机;2、控制杆;3、报警器;4、底座;5、张力杆;51、线夹;52、紧线器;53、防雨帽;6、转向杆;7、转向滑轮;8、张力索;9、紧线器;10、接地桩;11、避雷器;12、接地线;13、张力弹簧;14、警示牌;15、张力传感器。
具体实施方式
25.下面结合附图对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.实施例1结合图1,一种基于张力的电子围栏,包括围墙,包括物理层、传感层、控制层和网络层。
27.其中物理层,包括张力围栏单元、视频联动单元和报警单元,如图6,当检测到围栏单元发生入侵异常时,将报警信号通过串口传送给视频联动单元,视频联动单元根据接收到的串口数据进行指令解析,再决策是否开启视频采集,所述的张力围栏单元和视频联动单元均连接至报警单元。
28.传感层,包括设于张力围栏单元内的传感器组件,实时检测到围栏单元的状态,并将检测的信号传送到围栏主机1。
29.控制层,包括设于围墙上的围栏主机1和用于控制围栏主机1、视频联动单元和报警单元的上位机,所述的围栏单元由围栏主机1控制,实时读取采集由物理层和传感层发送来的数据,并进行分析;网络层,通过互联网和云系统将物理层的前端数据实时传输分析处理并上传至上位机。
30.电子围栏的多个围栏主机在上位机的统一控制下工作,各个围栏主机彼此独立,单一的分机故障不影响其余的分机工作,避免了部分分机出现故障,整个电子围栏系统崩溃的情况。
31.实施例2在实施例1的基础上,所述的报警单元包括报警主机、报警模块和报警器3,所述的报警主机接收来自传感层的监测数据,并将检测数据通过网络层连接至上位机,所述报警主机通过报警模块对监测数据进行分析处理,并根据处理结果启动或关闭报警器3,所述的报警器3设于围墙上,所述的报警模块包括:拉紧警报模块,检知到的拉力大于一定的阈值一段时间,则判断出现拉紧异常并发出警报;松弛警报模块,检知到的拉力低于一定阈值一段时间,则判断出现松弛异常并发
出警报;断路警报模块,出现信号短路时,则判断出现断路异常并发出警报;围栏主机1开盒警报模块,检知到围栏主机1被人为非法拆开,则判断出现防拆异常并发出警报;自检及故障报警模块,具有自检、自诊断能力,且具有设备故障报警功能。
32.当围栏单元发生报警时向报警主机发出报警信号,报警主机融合视频联动单元、振动传感器以及惯性传感器的反馈信息,再决策是否控制报警器发出报警信息。
33.实施例3在实施例1的基础上,所述的传感器组件包括:张力传感器15,设于控制杆2内,通过张力弹簧13与对应的张力索8连接,用于检测张力索8张力变化,每一张力索8对应一个张力传感器15;惯性传感器,以每隔2-3米通过张力索8串联成组敷设在围栏上,采集入侵信号并输入至围栏主机1分析或直接输入报警主机进行分析,所述的惯性传感器安设于普通防区内;振动传感器,附在张力索8上,感测到由张力索8表面传来的微弱压力和形变,采集入侵信号并传输至围栏主机1或直接输入报警主机进行分析,所述的振动传感器安设于重点防区内,每相邻的两个张力杆之间都部署一个振动传感器,以达到精确定位振动位置的目的,所有振动传感器报警信息可直接通过报警主机采集上传到上位机,保证脱机也可完成报警。
34.通过多传感器的融合,传感器将模拟信号转化为数字信号,采用小波包变换等多种现代数字信号处理技术对入侵信号进一步进行处理,可以检测到入侵者攀爬围栏、剪断围栏、翻越围栏等带来的振动信号,同时也能检测到环境中传输的大晕背景噪声,其中包括由自然环境引起的振动噪声,例如动物撞击、风、雨击打等,在对穿越距离较长、背景环境比较复杂的围栏进行检测时,对围栏沿线所发生的事件逐一进行分别,区分真正的入侵信号。
35.实施例4结合图1-5,所述的围栏单元包括通过底座4设于围墙上的控制杆2和通过底座4均匀排设控制杆2两侧的若干张力杆5,所述的若干张力杆5通过张力索8连接至控制杆2,用张力索连接两根相邻杆,在杆的外部形成线型,保证杆无流露缝隙,所述的控制杆2的两侧设有张力弹簧13,所述的张力索8依次穿过张力杆5并通过张力弹簧13连接至控制杆2,在围墙的拐角处设有用于连接张力索8的转向杆6。
36.所述的张力杆5的外部固定连接有用于限位张力索8的线夹51,所述张力杆5的顶部设有用于防雨的防雨帽52,所述张力索8上均设有紧线器9,用于调节张力索8的张弛程度,紧线器尽可能的置于相近的两根杆的中游地带,使劲将张力索拽紧,拉到平行即可,所述的张力索8上还穿设有警示牌14。
37.所述的围栏单元还包括避雷器11,所述避雷器11的正面接张力杆5的外部,所述避雷器11的反面通过接地线12接到大地,所述的接地线12靠近地面的一端通过接地桩10固定入地面。
38.所述转向杆6的底部通过底座4固定连接至围墙上,所述的转向杆6的外部、对应张力索8处设有供张力索8转向的转向滑轮,所述的围栏主机1固定于围墙的墙壁上,所述围栏主机1的外部设有防雨箱。
39.当有入侵者试图攀爬或破坏围栏时,控制杆将检测到张力索的不锈钢丝上的张力变化,并将数据传输给围栏主机,围栏主机根据接收到的数据进行分析,一旦检测到入侵者便发出报警信号。
40.实施例5结合图1,所述的视频联动单元包括摄像机,所述的摄像机内设有视频移动探测器,对摄像机产生的图像进行电子分析以检车图像的变化程度,所述的摄像机与传感器组联动,通过智能视频分析,识别警戒区域,实现预先报警,融合围栏、视频分析数据排除风吹等干扰影响。
41.所述的视频联动单元还包括主控模块、视频采集模块、视频处理模块、显示模块和串口模块,所述视频联动单元各模块的工作流程如下:主控模块,从初始化工作开始,先解析用户输入的命令,设定基本的编解码参数,包括编解码标准,视频格式大小,数据要保存的文件名,再创建同步机制;视频采集模块,前端采用cdd摄像头完成视频采集,采集到一帧数据上传到主控模块进行模数转换,转换完成后,视频采集模块将从内核空间取走一帧数据,在同时也通知视频处理模块及显示模块取走缓冲区中的一帧数据,进行视频的处理和显示;视频处理模块,完成对dsp端图像处理算法的调用,包括视频的编解码算法以及图像处理算法;显示模块,完成视频处理模块处理过的视频缓存区的数据传送给上位机并显示;串口模块,完成与围栏单元之间的交互,当围栏单元发生报警时向报警主机发出报警信号,报警主机根据串口接收到的数据,进行指令解析判断是否开启视频监控、录像保存及运动检测,并向围栏单元发出应答信号。
42.围栏单元和视频联动单元联动功能的实现使系统不仅可以有效地感知入侵,也使系统具备了视频重点监控、运动目标监测以及识别、录像保存等能力,不仅有效的克服了传统周界报警系统存在的报警后无法取证的缺点,而且可以准确的识别出具体的入侵对象及其趋势,在感知入侵的同时,便于对入侵者进行监控和取证,有效提高的安保人员对于区域突发事件的处理能力。
43.实施例6结合图7,在振动传感器中加入一个窗口电压比较器,振动传感器内部有电阻r4,在窗口电压比较器中加入参考电压u
rh
和u
rl
,电阻r1、r2和稳压管dz组成限幅电路,其中u
rh
=3v,u
rl
=0.1v,r1=1kω,r2=10kω,稳压管dz的稳定电压uz=5v,窗口电压比较器的输出电压uo=uz,其幅值为
±uom
,u
o1
和u
o2
分别为集成运放u2a和u3a的输出电压。
44.当振动传感器处于工作状态且没发生振动时,ui=2.5v,且u
rl
<ui<u
rh
,u
o1
=u
o2
=-u
om
,二极管d1和d2均截止,稳压管dz截止,uo=uz=0v。
45.当振动传感器处于工作状态且发生振动或振动传感器b段被断开时,ui=5v,ui>u
rh
>u
rl
,集成运放u2a的输出u
o1
=+u
om
,u3a的输出u
o1
=-u
om
,使得二级管d1导通,d2截止,稳压管dz工作在稳压状态,输出电压uo=uz=5v,通过检测稳压管工作在稳压状态的时间来判断振动传感器是政策振动还是发生故障,当稳压管工作在稳压状态的时间大于5s时,则认为振动传感器被人为破坏或发生故障。
46.当振动传感器a段被断开或正负极被短接时,ui=0v,且ui<u
rl
<u
rh
,集成运放u3a
的输出u
o2
=+u
om
,u2a的输出u
o1
=-u
om
,二极管d2导通,d1截止,稳压管工作在稳压状态,输出电压uo=uz=5v。
47.通过在振动传感器模块加入这个窗口电压比较器,使得这个周界报警系统更加完善可靠,在不妨碍正常情况的报警同时,还能检测有人蓄意破坏振动传感器入侵所保护的区域或振动传感器发生故障短路或断路的情况。
48.以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的保护范围内所做的任何修改,等同替换等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1