一种高速公路弯道临时施工区预警方法
1.本发明属于高速公路施工区交通事故防范领域,具体涉及一种高速公路弯道临时施工区预警方法。
背景技术:
2.在高速公路弯道施工区路段,道路状况会发生变化。若驾驶员由于分心或疲劳等原因,未能及时做出正确有效的驾驶操作,车辆将会闯入弯道施工区,如果此时施工人员没有得到预警信息,将会受到伤害。
3.现阶段施工区防护设备包括移动式可变限速板和基于物联网的防闯入设备。移动式可变限速板携带不便,且无法规避走神的驾驶员闯入施工区;而基于物联网的防闯入设备,需要车辆撞倒布设在路上的水马才能检测是否有车辆闯入施工区,然后再通过无线通信通知施工人员逃生,并且基于物联网的防闯入设备需要通过复位水马才能实现持续检测。
4.授权号为cn204740704u的中国实用新型专利提供了一种施工区安全预警系统,该系统通过车辆撞倒检测装置来检测车辆是否闯入施工区,无线通信将该信息传递给控制装置,随后控制情报板和报警装置工作。若有车辆撞倒检测装置,如果想要持续检测,就要手动恢复该检测装置,操作不便且存在安全风险;而且这套装置携带不方便。
5.现有文献“[1]廖济柙.高速公路养护危险性现场空间分析[j].交通标准化,2003(09):35-37.”结合石安高速公路的运营情况,从道路通行能力、行车速度、横断面、中央分隔带、天气情况、噪声和尾气方面,分析了高速公路养护的危险性。但并未提出一种有效降低高速公路养护危险性的方法措施。
[0006]
现有文献“[2]梁素芳.弯坡路段交通事故分析与预测[d].吉林大学,2016.”以道路事故模糊信息为基础,运用决策树方法对弯坡路段交通事故进行分析并预测,为行驶在弯坡路段上的驾驶员提供有效的交通事故预警信息,减少交通事故的发生。但对于不正常驾驶的驾驶员,预警信息可能会被驾驶员忽略,并不能保证道路行驶安全。由于预警信息只是针对驾驶员,当预警信息没有被驾驶员有效接收时,如果前方有施工区,就会导致交通事故的发生,无法将损失降到最低。
[0007]
因此,开发高速公路弯道施工区防闯入智能预警装备和技术,对驾驶人进行施工预警,并在车辆存在闯入施工区的风险时对施工人员进行预警使其能够及时疏散,对于降低施工区交通事故率具有重要意义。
技术实现要素:
[0008]
针对现有技术中存在的问题,本发明的目的在于提供一种高速公路弯道临时施工区预警方法,能够及时对驾驶人进行预警,避免车辆闯入弯道段施工车道,并对施工人员发出安全警告,降低了高速公路过往车辆闯入弯道段施工区发生交通事故的概率,保障了施工人员的安全。
[0009]
为了达到上述目的,本发明采用以下技术方案予以实现。
[0010]
本发明提供一种高速公路弯道临时施工区预警方法,包括以下步骤:
[0011]
步骤1,获取弯道路段的有效车辆轨迹,得出弯道路段的车道中心线;获取弯道路段每个车道的车道中心线的线性插值模型;
[0012]
步骤2,采集弯道车辆轨迹数据,分别代入弯道路段每个车道的车道中心线的线性插值模型,得出车辆所在车道;
[0013]
步骤3,判断车辆是否处于施工区车道,若车辆不处于施工区车道,则不作处理;若车辆处于施工区车道,根据车辆速度和车辆到毫米波雷达的弯道距离,进行预警。
[0014]
优选的,所述步骤1中得出弯道路段的车道中心线,包括以下子步骤:
[0015]
子步骤1.1,以k米为一个车道微元将每个车道微元化;
[0016]
子步骤1.2,提前采集弯道路段车辆轨迹数据,剔除其中的换道车辆轨迹,得到有效车辆轨迹,将有效车辆轨迹离散化到对应的车道微元中;
[0017]
子步骤1.3,计算有效车辆轨迹在各自车道中每个车道微元的坐标均值其中,(xj,yj)为一个车道微元中车辆轨迹坐标,n为一个车道微元中的车辆轨迹坐标个数,为n个xj求和,为n个yj求和;将每个车道中所有坐标均值依次连接作为车道中心线。
[0018]
优选的,步骤1中的车道中心线的线性插值模型为:
[0019]
yi=fyi(x)
[0020]
xi=fxi(y)
[0021]
其中,(x,y)是行驶车辆的坐标,i是车道的序号,i为自然数;xi和yi为车道中心线的线性差值模型的坐标。
[0022]
优选的,所述步骤2中得出车辆所在车道,包括如下子步骤:
[0023]
子步骤2.1,实时获取当前车辆坐标:
[0024]
y=d*cos(θ)
[0025]
x=d*sin(θ)
[0026]
其中,(x,y)是监测到的路上行驶车辆的坐标,d为毫米波雷达到当前车辆的相对距离,θ为毫米波雷达测到的相对角度,即车辆与毫米波雷达的连线与毫米波雷达放置方向的夹角;
[0027]
子步骤2.2,将当前车辆的坐标(x,y)分别代入每个车道中心线的线性插值模型中,得到i组坐标(x,yi)和(xi,y);一组(x,yi)和(xi,y)确定的直线到(x,y)的距离记为di,最小的di对应的车道为第i车道,即第i车道为当前车辆所在车道;
[0028]
其中,(xi,y)是车辆的坐标(x,y)在y轴上投影与车道中心线交点的坐标,(x,yi)是坐标(x,y)在x轴上投影与车道中心线交点的坐标,i是车道的序号,i为自然数。
[0029]
优选的,所述步骤3中,车辆到毫米波雷达的弯道距离,计算方式如下:
[0030]
在施工区车道中,将距离毫米波雷达最近的车道微元作为毫米波雷达所在的车道微元;毫米波雷达所在的车道微元为第q个车道微元,车辆所在的车道微元为第p个车道微元,则车辆到毫米波雷达的弯道距离近似为l=k/2+(p-q)*k。
[0031]
优选的,所述步骤3中进行预警的策略为,车辆速度≥60km/h且车辆到毫米波雷达
的弯道距离≤200m时,进行预警。
[0032]
与现有技术相比,本发明的有益效果为:
[0033]
(1)本发明通过毫米波雷达监测车辆行驶信息,当车辆有闯入弯道施工区的可能时,及时对驾驶人进行预警,降低高速公路过往车辆闯入施工区发生交通事故的概率;
[0034]
(2)本发明在对驾驶人进行预警的同时,对施工人员发出安全警告,疏散施工人员,使发生交通事故后的损失降到最低,保障施工人员的安全。
附图说明
[0035]
下面结合附图和具体实施例对本发明做进一步详细说明。
[0036]
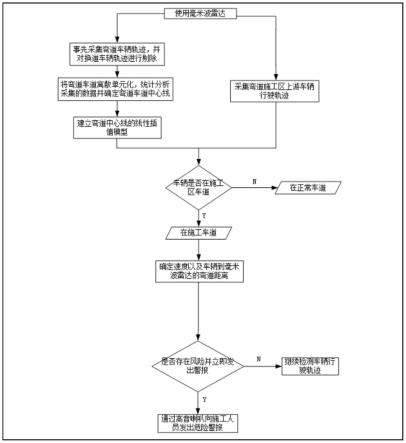
图1为高速公路车辆闯入弯道段施工区智能预警流程图;
[0037]
图2为弯道采集车辆行驶轨迹数据确定车道中心线示图;
[0038]
图3为车道微元化示图;
[0039]
附图标识为:1弯道施工区;2毫米波雷达放置点;3确定弯道车辆中心线时雷达放置方向;4施工区上游车辆;5车道微元。
具体实施方式
[0040]
下面将结合实施例对本发明的实施方案进行详细描述,但是本领域的技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限制本发明的范围。
[0041]
本发明的高速公路弯道临时施工区预警方法,基于高速公路弯道临时施工区预警系统,所述高速公路弯道临时施工区预警系统包括毫米波雷达、嵌入式工控机、报警设备和控制器局域网络can服务器;
[0042]
毫米波雷达,用于采集施工车道车辆轨迹数据,并将车辆轨迹数据通过控制器局域网络can服务器送入嵌入式工控机;
[0043]
嵌入式工控机,用于接收毫米波雷达通过控制器局域网络can服务器送入的车辆轨迹数据,并对车辆轨迹数据进行分析和判断;嵌入式工控机也用于对报警设备发出指令;
[0044]
报警设备,包括高音喇叭和施工现场智能预警副机,用于接收嵌入式工控机发出的指令,进行语音和灯光报警;
[0045]
控制器局域网络can服务器,用于控制器局域网络can与嵌入式工控机之间数据的转换和传输。
[0046]
高速公路弯道临时施工区预警系统的工控机内预先存储施工所占用的车道信息,使用前设置毫米波雷达距离最右侧车道的距离、每个车道的宽度和车道方向的参数。
[0047]
参考图1,为本发明的高速公路车辆闯入弯道段施工区智能预警流程图。本发明提供一种高速公路弯道临时施工区预警方法,包括以下步骤:
[0048]
步骤1,获取弯道路段的有效车辆轨迹,得出弯道路段的车道中心线;获取弯道路段每个车道的车道中心线的线性插值模型;
[0049]
作为本发明的一种改进,得出弯道路段的车道中心线,包括以下子步骤:
[0050]
子步骤1.1,以k米为一个车道微元将每个车道微元化;
[0051]
本实施例中,以5m为一个车道微元5。具体的,如图3所示,为本发明的车道微元化示图,图中车道为3车道道路,i从1到3。
[0052]
子步骤1.2,提前采集弯道路段车辆轨迹数据,剔除其中的换道车辆轨迹,得到有效车辆轨迹,将有效车辆轨迹离散化到对应的车道微元中;
[0053]
具体的,将毫米波雷达放置于距离施工区前方200m左右的应急车道处,采集10min的车辆轨迹数据;
[0054]
由于本实施例的毫米波雷达2所测角度范围为
±
10
°
时,测距长度为175米,所以当弯道的曲率半径小于525米时,为了能够采集到更远处的施工区上游车辆4的行驶轨迹数据,毫米波雷达的放置方向3应适当偏向弯道内侧,毫米波雷达的放置方向3如图2中红色虚线所示。
[0055]
剔除换道车辆轨迹采用线性插值的方法。设定参数kc,用于根据测到的车辆轨迹数据判定车辆是否存在换道行为,本实施例中kc=3。确定一个车辆在该车道x坐标下的y的插值以及y坐标下的x的插值,根据插值轨迹与该车辆所在车道微元中心线的横向距离,判断车辆是否偏离轨迹。插值轨迹中,如果有kc个以上的插值与车辆所在车道微元中心线的横向距离ls>3m,判定该车辆有换道行为,剔除其轨迹。
[0056]
毫米波雷达2采集的10min的车辆轨迹数据,经剔除换道车辆的轨迹后,得到有效车辆轨迹。
[0057]
子步骤1.3,计算有效车辆轨迹在各自车道中每个车道微元的坐标均值其中,(xj,yj)为一个车道微元中车辆轨迹坐标,n为一个车道微元中的车辆轨迹坐标个数,为n个xj求和,为n个yj求和;将每个车道中所有坐标均值依次连接作为车道中心线。
[0058]
步骤1中,确定弯道车道中心线的线性插值模型为:
[0059]
yi=fyi(x)
[0060]
xi=fxi(y)
[0061]
其中,(x,y)是行驶车辆的坐标,i是车道的序号,i为自然数;xi和yi为车道中心线的线性差值模型的坐标。
[0062]
步骤2,采集弯道车辆轨迹数据,分别代入弯道路段每个车道的车道中心线的线性插值模型,得出车辆所在车道;
[0063]
作为本发明的一种改进,得出车辆所在车道,包括如下子步骤:
[0064]
子步骤2.1,实时获取当前车辆坐标:
[0065]
y=d*cos(θ)
[0066]
x=d*sin(θ)
[0067]
其中,(x,y)是监测到的路上行驶车辆的坐标,d为毫米波雷达到当前车辆的相对距离,θ为毫米波雷达测到的相对角度,即车辆与毫米波雷达的连线与毫米波雷达放置方向的夹角;
[0068]
子步骤2.2,将当前车辆的坐标(x,y)分别代入每个车道中心线的线性插值模型中,得到i组坐标(x,yi)和(xi,y);一组(x,yi)和(xi,y)确定的直线到(x,y)的距离记为di,最小的di对应的车道为第i车道,即第i车道为当前车辆所在车道;
[0069]
其中,(xi,y)是车辆的坐标(x,y)在y轴上投影与车道中心线交点的坐标,(x,yi)是坐标(x,y)在x轴上投影与车道中心线交点的坐标,i是车道的序号,i为自然数。
[0070]
步骤3,判断车辆是否处于施工区车道,若车辆不处于施工区车道,则不作处理;若车辆处于施工区车道,根据车辆速度和车辆到毫米波雷达的弯道距离,进行预警。
[0071]
作为本发明的一种改进,车辆到毫米波雷达的弯道距离,计算方式如下:
[0072]
在施工区车道中,将距离毫米波雷达最近的车道微元作为毫米波雷达所在的车道微元;毫米波雷达所在的车道微元为第q个车道微元,车辆所在的车道微元为第p个车道微元,则车辆到毫米波雷达的弯道距离近似为l=k/2+(p-q)*k。
[0073]
参考图3,车辆到毫米波雷达的弯道距离近似为l=5/2+(6-2)*5=22.5m。
[0074]
在弯道路段,毫米波雷达在弯道路段获取的车辆的速度和实际的车辆速度的误差很小,毫米波雷达在弯道路段获取的车辆的速度近似等于实际车速。
[0075]
在弯道路段,毫米波雷达测到的车辆到毫米波雷达的距离为车辆与毫米波雷达之间的直线距离。当车辆距离毫米波雷达较近时,如距离30米,可以近似该路段为直线段,毫米波雷达测到的车辆到毫米波雷达的距离就是车辆到毫米波雷达的弯道距离;当车辆到毫米波雷达的距离较远时,毫米波雷达不能直接测出。此时将弯道路段微元化,确定每个车道微元到毫米波雷达的距离,即可确定车辆到毫米波雷达的弯道距离。
[0076]
作为本发明的一种改进,进行预警的策略为,车辆速度≥60km/h且车辆到毫米波雷达的弯道距离≤200m时,进行预警。
[0077]
若车辆所在的车道是施工区车道,当车辆到毫米波雷达的弯道距离≤200m且速度大于60km/h或者车辆有压线、s型行驶行为,可能威胁施工现场人员人身安全时,高音喇叭实时向上述车辆发出有效定向声波预警和爆闪警示,及时提醒上游车辆司机注意安全、变道行驶。如车辆变道行驶或减速至60km/h以下行驶时,高音喇叭自动关闭预警定向声波。
[0078]
如果车辆未变道且继续沿施工区车道行驶,并车辆到毫米波雷达的弯道距离≤100m范围且速度≥60km/h时,高音喇叭向上游车辆发出更强定向声波预警,令其变道行驶或采取制动措施,同时控制施工现场智能预警副机提醒作业人员及时避让;如车辆变道行驶或减速至35km/h以下行驶时,高音喇叭自动关闭。
[0079]
虽然,本说明书中已经用一般性说明及具体实施方案对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1