一种智能行车雾区诱导控制系统的制作方法
1.本发明涉及雾区行车技术领域,具体为一种智能行车雾区诱导控制系统。
背景技术:
2.雾是高速公路最为常见的灾害天气类型之一,城市化进程和路网密度的增加,导致雾对高速公路交通安全影响日趋严重,对雾天特大交通事故的类型进行统计发现,追尾事故约占各类事故总量的60.42%,相撞事故占到了 22.92%。
3.目前国内高速公路安装的应对雾霾天气的科技设备主要有:气象监测、雾灯、交通诱导和超速抓拍等,这些设备主要是被动引导,独立作战,形不成合成效应,遇到雾霾恶劣天气的时候,交通事故依然频发,所以应用先进技术解决交通安全与绿色节能是必然发展方向,故而,提出一种智能行车雾区诱导控制系统来解决上述问题。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种智能行车雾区诱导控制系统,具备对公路能见度实时检测等优点,解决了目前国内高速公路安装的应对雾霾天气的科技设备主要有:气象监测、雾灯、交通诱导和超速抓拍等,这些设备主要是被动引导,独立作战,形不成合成效应,遇到雾霾恶劣天气的时候,交通事故依然频发的问题。
6.(二)技术方案
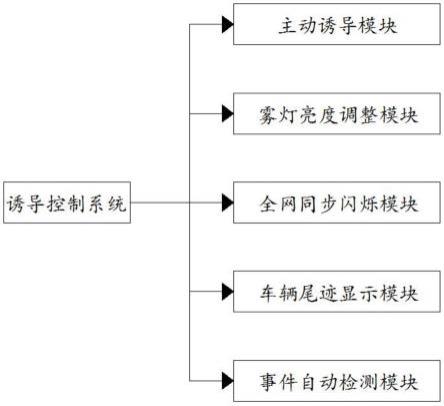
7.为实现上述目的,本发明提供如下技术方案:一种智能行车雾区诱导控制系统,包括:
8.主动诱导模块,实时监测区域内的能见度数值,当能见度指数低于阀值时,系统自动运行能见度诱导策略和预警控制策略;
9.雾灯亮度调整模块,根据雾浓度的不同,发光警示单元可自动调整光的强度,提高穿透力,提高驾驶人员的安全预视距离;
10.全网同步闪烁模块,基于gps高精度时钟保持网内所有路侧诱导单元同步亮灭,同步精度小于25ms,不会对驾驶员眼睛产生闪烁不均的情况,同步闪烁的频率可调,以适应于不同道路的危险程度;
11.车辆尾迹显示模块,通过尾迹的方式为每一辆进入雾区的车辆提供一个随前车前行的尾迹显示警示灯带,检测通过的车辆被点亮后向限定距离内的警示灯组,随着车辆前行,尾迹也会随车辆前行而同步点亮,为后车提供了前车精确的车距提示,车辆的尾迹的组数可调;
12.事件自动检测模块,当发生意外事故后,通过热成像事件检测器自动报警,通知管理部门进行救援,并启动红黄色交替高频显示进行预警,放止二次事故的发生。
13.进一步,所述车辆的尾迹为安全预警距离,所述尾迹长度固定每组20米,通常设置3组60米的安全距离。
14.进一步,所述因雾浓度、持续时间、出现频率、能见度和类型不同等原因,研究雾的危险分级判定指标和阈值,建立雾与交通事故间的数学关系,发光警示单元便可根据雾的危险分级自动调整光的强度,提高穿透力。
15.进一步,所述雾的能见度监测手段包括人工观测和仪器监测。
16.进一步,所述策略主要包括警示信息提示,限定车速,超速抓拍,启动高音号角及警灯,提醒司机注意道路状况,减速慢行,启动智能雾灯,根据能见度等级调整亮度和闪烁频率,同时红外热成像事件检测器启动,监测路面状态,随时准备报警,并启动相应的应急预案。
17.进一步,所述热成像时事件检测器可以在事故发生后,迅速的检测,定位事故,并根据事故情况,启动相应的应急预案,避免二次事故的发生。
18.进一步,所述对近100km高速公路雾区道路进行观测,提出了能见度-速度关系模型:
19.小型车:
20.v=8.414lns+32.816
21.大型车:
22.v=3.177lns+36.87
23.式中,v表示车速;s表示大气能见度(s≤200m);
24.前后车之间的速度差与能见度、制动加速度和反应时间的关系表示为:
[0025][0026]
δv为安全允许速度差;v2为后随车速度;v1表示前导车速度;c为驾驶员反应时间与车辆制动生效时间之和;a为后随车的加速度;s为大气能见度;m 表示前后车速度一致时车辆间的安全距离。
[0027]
(三)有益效果
[0028]
与现有技术相比,本发明提供了一种智能行车雾区诱导控制系统,具备以下有益效果:
[0029]
该智能行车雾区诱导控制系统,通过针对雾及其他恶劣天气条件下低能见度道路行车安全保障的新型研究方向,重点针对高速公路及普通公路的雾区路段,通过对公路能见度实时检测,分析检测结果,及时启动智能雾灯、高音号角、警灯,并根据道路能见度同步修改可变限速信息板显示的限速值,智能雾灯在显示道路路廓的同时,具有尾迹显示功能,提醒后车保持车距,防止追尾事故的发生,当发生意外事故后,通过热成像事件检测仪自动报警,同时启动各种应急预案,防止二次事故的发生。
附图说明
[0030]
图1为本发明提出的一种智能行车雾区诱导控制系统示意图;
[0031]
图2为本发明提出的一种智能行车雾区诱导控制系统雾能见度监测手段对比表;
[0032]
图3为本发明提出的一种智能行车雾区诱导控制系统车头间距和车头时距分布图。
具体实施方式
[0033]
下面将结合本发明的实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
请参阅图1,一种智能行车雾区诱导控制系统,包括:
[0035]
主动诱导模块,实时监测区域内的能见度数值,当能见度指数低于阀值时,系统自动运行能见度诱导策略和预警控制策略;
[0036]
雾灯亮度调整模块,根据雾浓度的不同,发光警示单元可自动调整光的强度,提高穿透力,提高驾驶人员的安全预视距离;
[0037]
全网同步闪烁模块,基于gps高精度时钟保持网内所有路侧诱导单元同步亮灭,同步精度小于25ms,不会对驾驶员眼睛产生闪烁不均的情况,同步闪烁的频率可调,以适应于不同道路的危险程度;
[0038]
车辆尾迹显示模块,通过尾迹的方式为每一辆进入雾区的车辆提供一个随前车前行的尾迹显示警示灯带,检测通过的车辆被点亮后向限定距离内的警示灯组,随着车辆前行,尾迹也会随车辆前行而同步点亮,为后车提供了前车精确的车距提示,车辆的尾迹的组数可调;
[0039]
事件自动检测模块,当发生意外事故后,通过热成像事件检测器自动报警,通知管理部门进行救援,并启动红黄色交替高频显示进行预警,放止二次事故的发生。
[0040]
需要说明的是,车辆的尾迹为安全预警距离,尾迹长度固定每组20米,通常设置3组60米的安全距离。
[0041]
同时,因雾浓度、持续时间、出现频率、能见度和类型不同等原因,研究雾的危险分级判定指标和阈值,建立雾与交通事故间的数学关系,发光警示单元便可根据雾的危险分级自动调整光的强度,提高穿透力。
[0042]
需要注意的是,雾的能见度监测手段包括人工观测和仪器监测。
[0043]
同时,策略主要包括警示信息提示,限定车速,超速抓拍,启动高音号角及警灯,提醒司机注意道路状况,减速慢行,启动智能雾灯,根据能见度等级调整亮度和闪烁频率,同时红外热成像事件检测器启动,监测路面状态,随时准备报警,并启动相应的应急预案。
[0044]
需要说明的是,热成像时事件检测器可以在事故发生后,迅速的检测,定位事故,并根据事故情况,启动相应的应急预案,避免二次事故的发生。
[0045]
同时,对近100km高速公路雾区道路进行观测,提出了能见度-速度关系模型:
[0046]
小型车:
[0047]
v=8.414lns+32.816
[0048]
大型车:
[0049]
v=3.177lns+36.87
[0050]
式中,v表示车速;s表示大气能见度(s≤200m);
[0051]
前后车之间的速度差与能见度、制动加速度和反应时间的关系表示为:
[0052]
[0053]
δv为安全允许速度差;v2为后随车速度;v1表示前导车速度;c为驾驶员反应时间与车辆制动生效时间之和;a为后随车的加速度;s为大气能见度;m 表示前后车速度一致时车辆间的安全距离
[0054]
请参阅图2,多种监测方式进行对比:
[0055]
其中,人工观测优点是方便、灵活,缺点是准确性不高,主观性较强,观测视程短;仪器监测主要是通过能见度仪获取一定范围内的能见度数据;前向散射式能见度仪是目前主要使用的监测设备,其原理是通过测量散射系数估算消光系数和气象光学视程,仪器监测较人工监测准确性更高、更客观,但受地理位置、灰尘、湿度和气溶胶等因素影响,导致测量误差较大。
[0056]
请参阅图3,雾对车头时距的影响实验:
[0057]
雾影响驾驶员动态决策行为,主要体现在车头时距、车头间距以及驾驶员对前车的速度估计上,在驾驶员能感觉到雾存在但雾不至于影响驾驶员正常行驶的条件下,驾驶员往往会增加车头时距以保障安全,随着能见度逐渐降低,驾驶员对能见度以外的前车行驶状态的预测与感知将受到严重影响,驾驶员将缩小与前车的行车间距使之在可视范围以内,同时,能见度降低使得道路周围环境对驾驶员刺激进一步降低,驾驶员往往低估前车车速,也会增加驾驶员减少跟车距离的趋势,如图3所示,通过实测数据分析指出了有雾和无雾条件下的车头间距以及车头时距的累积分布,有雾时的车头间距低于无雾时的情况,而车头时距则表现出相反的特征。
[0058]
本发明的有益效果是:
[0059]
该智能行车雾区诱导控制系统,通过针对雾及其他恶劣天气条件下低能见度道路行车安全保障的新型研究方向,重点针对高速公路及普通公路的雾区路段,通过对公路能见度实时检测,分析检测结果,及时启动智能雾灯、高音号角、警灯,并根据道路能见度同步修改可变限速信息板显示的限速值,智能雾灯在显示道路路廓的同时,具有尾迹显示功能,提醒后车保持车距,防止追尾事故的发生,当发生意外事故后,通过热成像事件检测仪自动报警,同时启动各种应急预案,防止二次事故的发生。
[0060]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1