一种基于偏最小二乘Kriging模型的路径诱导方法
一种基于偏最小二乘kriging模型的路径诱导方法
技术领域
1.本发明涉及交通管控与智能交通领域,尤其是涉及一种基于偏最小二乘 kriging模型的路径诱导方法。
背景技术:
2.随着机动车保有量的持续增长,多数城市的交通供给能力已无法满足交通需求,交通拥堵现象在城市路网中愈发常见。各类偶发性事件,如交通事故、极端天气等同样严重了影响交通系统的通行效率。拥堵不仅造成了经济损失和资源浪费,还会带来严重的环境污染问题。为了缓解交通拥堵现象,先进的出行者信息系统(advanced traveler information systems,atis)成为提升城市路网通行效率的重要手段。
3.atis可将路网的实时交通状况和突发事件信息发送给用户(出行者),触发用户的在途路径选择行为(en-route diversion),帮助用户及时调整出行路线,从而避开发生拥堵或交通事故的路段。atis的实现形式包括各类可变信息标志(variablemessage sign,vms):拥堵警告、速度建议、路径提示,导航系统(navigation system),以及智能网联环境下基于车载无线通信技术的路径引导(connected vehicleguidance)等。大量研究表明,atis信息触发的在途路径选择行为不仅可以缩短个体用户的出行时间,还将显著提升整个系统的运行效率。
4.早期关于atis设计的研究大都关注vms的布设位置优化问题。后来的研究多将vms的布设位置与vms的种类、显示信息等变量综合考虑,并协同优化。 atis优化设计中需要考虑一个重要的因素:用户对实时信息的反应和遵从度 (compliance rate)。用户的遵从度与在途换路的用户比例(diversion rate)直接相关,多数vms布设优化的研究都分析了该参数的灵敏度,结果显示在途换路的用户比例对路网通行效率有显著影响。因此若要通过atis发布实时的路径诱导信息以改善拥堵网络的通行效率,首先需要确定拥堵瓶颈路段上游需要重新规划路线的在途用户比例,然后发布适当的atis信息引导这部分用户重新选择路线。目前已有大量研究讨论了如何合理设计atis信息,从而影响在途用户对该信息的遵从度并达到期望的换路比例:通过动态调整atis信息,或引入其他交通控制手段调整受 atis信息影响在途用户的比例。此外,确定瓶颈上游所需的最佳在途换路用户比例也是一个重要的课题,但目前对该问题的研究较少。大规模城市路网在高峰期容易多点同时发生常发性拥堵,且可能伴随着由于突发事件引起的偶发性拥堵,此时网络的通行效率将显著降低。然而该类场景的优化决策空间较大,优化难度高,目前关于该场景下atis优化设计的研究较少。
5.在方法层面,atis优化设计的研究中通常有两种建模方式:解析模型及仿真模型。解析模型通过排队论模型、确定性用户均衡或随机用户均衡等建立起决策变量和目标函数之间的映射关系,并基于一定的优化算法进行求解。然而解析模型很难同时准确刻画大规模城市路网中的交通动态演化过程、由于拥堵引发的流量溢出以及用户对atis信息的反应行为等复杂交通现象。仿真模型即利用成熟的交通仿真工具模拟实际的交通流演变过程,
基于仿真结果计算目标函数值。与解析模型相比,仿真模型可以准确刻画上述的复杂交通现象,但也具有不可解析、计算成本高、仿真噪声大的难题。早期基于仿真模型的atis优化设计大都使用启发式算法,该方法在优化过程中需要频繁调用仿真模型计算目标函数值,在有限的计算资源内很难获得理想的优化结果。最新的研究利用基于贝叶斯优化的仿真优化方法设计 atis,建立高斯过程代理模型,通过代理模型评估目标函数值可以极大减少仿真模型的调用次数。然而该研究使用的代理模型计算复杂度高,在高维仿真优化问题中的计算效率较低。因此受限于仿真模型和代理模型较高的计算成本,目前仿真优化方法只能处理较低维度的atis设计问题。
6.基于以上分析,现有技术目前还存在以下问题:
7.1)没有考虑在大规模偶发拥堵和常发拥堵共存场景中的在途换路用户比例确定;
8.2)高维度atis仿真优化的效率低。
技术实现要素:
9.本发明的目的就是为了克服上述现有技术存在的缺陷而提供了一种高效的基于偏最小二乘kriging模型的路径诱导方法,该方法考虑了大规模偶发拥堵和常发拥堵共存场景中的在途换路用户比例确定问题,且提高了高维度atis仿真优化的效率。
10.本发明的目的可以通过以下技术方案来实现:
11.本发明提供了一种基于偏最小二乘kriging模型的路径诱导方法,该方法包括以下步骤:
12.步骤s1、基于实际的交通供给、需求及突发交通状况信息,确定需要发送“前方拥堵警告”信息的拥堵上游路段;
13.步骤s2、确定以拥堵上游路段的在途换路用户比例为决策变量、以最小化系统总出行时间为优化目标的连续优化问题,并构建用于计算目标函数值的中观交通仿真模型;
14.步骤s3、基于拉丁超立方抽样在解空间中均匀抽取样本,并带入所述中观交通仿真模型计算样本的目标函数值,建立仿真样本集合;
15.步骤s4、利用仿真样本集合,建立基于偏最小二乘kriging模型的代理模型;
16.步骤s5、基于代理模型,利用群遗传算法和改善期望函数在解空间内进行二次采样,获得最大价值采样点;
17.步骤s6、将最大价值采样点带入所述中观交通仿真模型中计算其目标函数值,并更新仿真样本集合;
18.步骤s7、判断是否达到最大迭代次数,若否,则返回步骤s4,否则结束输出当前得到的最优解。
19.优选地,所述步骤s1中的拥堵上游路段包括常发性拥堵上游路段和偶发性拥堵上游路段;
20.所述偶发性拥堵上游路段采用直接确定法进行确定;所述直接确定法为将偶发性拥堵上游的上下匝道设定范围内路段作为偶发性拥堵上游路段。
21.优选地,所述常发性拥堵上游路段采用主成分分析法进行确定;所述主成分分析法包括:路段选取、路段降维以及路段筛选。
22.优选地,所述路段选取具体为:
23.通过用于判断路段车流拥堵程度的路段速度损失率函数选择拥堵路段上游的所有路段中速度损失大于预设值的路段,得到路段选取结果l
b,1
;
24.所述路段速度损失率函数表达式为:
[0025][0026]
式中,li为第i条路段的速度损失率,t为总的时间片段数,为第i条路段在t时间片段的速度,v
i,lim
为第i条路段的限速。
[0027]
优选地,所述路段降维为使用主成分分析法对路段选取结果l
b,1
进行降维,具体包括以下子步骤:
[0028]
1)将样本数据标准化,得到标准化阵z,表达式为:
[0029][0030]
式中,z
ij
为标准化阵z的元素,sj分别为变量yj对应样本的均值和标准差;变量yj包括:各在途换路用户比例下系统总出行时间减少量平均值y1、系统总出行时间减少量的最小值y2、系统总出行时间减少量的最大值y3、系统总出行时间减少量的上四分位数y4、系统总出行时间减少量的中位数y5、系统总出行时间减少量的下四分位数y6、各在途换路用户比例下系统总出行时间减少量的极差y7、以及各在途换路用户比例下系统总出行时间减少量总和y8;
[0031]
2)计算标准化阵z的协方差矩阵r,表达式为
[0032][0033]
式中,r
ij
为协方差矩阵r的元素,n为样本容量:
[0034]
3)计算协方差矩阵r的特征值λ1≥λ2≥
…
≥λn≥0以及对应特征向量 u1,u2,
…
,un;
[0035]
4)计算各主成分yi的贡献率bj以及y1,y2,
…
,y
p
累计贡献率α
p
:
[0036][0037][0038]
选取特征值大于1且累计贡献率约达到90%的成分作为主成分;
[0039]
5)获得成分得分系数矩阵,计算各成分得分,之后通过旋转后的方差百分比与各成分得分求出最后的综合评价得分,得到降维后的上游路段l
b,2
。
[0040]
优选地,所述路段筛选具体为:引入候选路段的最短间距限制,从降维后的上游路段l
b,2
中进行筛选,将筛选后的结果作为常发性拥堵上游路段lb。
[0041]
优选地,所述步骤s2中确定以拥堵上游路段的在途换路用户比例为决策变量、以最小化系统总出行时间为优化目标的连续优化问题,并构建用于计算目标函数值的中观交通仿真模型,具体为:
[0042]
1)定义决策变量为n个上游路段在途换路的用户比例,目标函数为系统总出行时
间的期望f(x)最小;其中,所述决策变量表达式为:
[0043]
x=[x1,x2,...,xn]
t
[0044]
式中,1,2,...,n表示拥堵上游发布atis信息的路段,即步骤s1中确定的拥堵上游路段l,xi表示第i个路段上在途换路用户的比例;
[0045]
2)将p次重复仿真所得系统总出行时间的平均值y(x)作为系统总出行时间期望f(x)的近似估计值,将原目标函数转化为近似目标函数,优化数学模型具体如下:
[0046]
所述原目标函数表达式为:
[0047][0048]
式中,f(x)为系统总出行时间的期望;为系统总出行时间,包含一个随机变量;r,r分别为用户出行的起点节点及所有起点节点的集合;s,s分别为用户出行的终点节点及所有终点节点的集合;t,t分别为用户的出发时刻及所有出发时刻的集合;为高峰时段t时刻从起点r到终点s的总出行量;为高峰时段t 时刻从起点r到终点s的平均出行时间,与x有关;为非高峰时段t时刻从起点r 到终点s的总出行量;为非高峰时段t时刻从起点r到终点s的平均出行时间,与x无关;
[0049]
所述近似目标函数表达式为:
[0050][0051]
其中y(x)为系统总出行时间期望的估计值;p为重复仿真的次数;为的一个取值,可在随机因素的取值为时运行一次仿真得到该值;
[0052]
约束条件为:
[0053]
x
min
≤x≤x
max
[0054]
式中,x
min
=[0,0,...,0]
t
为在途换路用户比例的下限;x
max
=[1,1,...,1]
t
为在途换路用户比例的上限。
[0055]
优选地,所述步骤s4具体为:
[0056]
步骤s4.1、构建基于偏最小二乘kriging模型的代理模型,表达式为:
[0057]fm
(x)=μ+ε(x)
[0058]
式中,μ是目标函数的平均值;ε(x)为估计误差,服从均值为0、方差为σ2的高斯分布,满足以下协方差关系:
[0059]
cov[ε(x(i)),ε(x
(j)
)]=σ2ψ(x(i),x
(j)
)
[0060]
式中,x(i)为第i个路段上在途换路用户的比例;ψ为偏最小二乘kriging基函数,表达式为:
[0061][0062]
式中,θ=[θ1,θ2,...,θh]
t
为使得h维决策变量每个维度的基函数具备不同的宽度
缩放的系数向量;为表征第l个决策变量对输出依赖程度的参数,其中,k为设定的正整数;
[0063]
任意决策变量x*的目标函数估计值及其估计误差表达式为:
[0064][0065][0066]
式中,r为基于仿真样本集合d中的观测数据得到的相关矩阵,表达式为:
[0067]ri,j
=ψ(x(i),x
(j)
);
[0068]
r为协方差向量,表达式为:
[0069]
r={cov[ε(x*),ε(x
(1)
)],...,cov[ε(x*),ε(x
(d)
)]}
t
[0070]
步骤s4.2、采用网格搜索法和交叉验证法确定代理模型的初始参数θ0的最佳取值。
[0071]
优选地,所述步骤s4.2具体为:
[0072]
1)将仿真样本集合d随机分为k份,得到子样本集合:d1,d2,...,dk;
[0073]
2)将θ0的取值网格化,θ={0.001,0.01,0.1,1,10};
[0074]
3)将θ中的值逐一赋给θ0,使用k折交叉验证计算代理模型的平均预测误差;
[0075]
4)选择θ中平均预测误差最小的参数作为θ0的初始参数值。
[0076]
优选地,所述步骤s5包括以下子步骤:
[0077]
步骤s5.1、利用代理模型辅助的多种群遗传算法进行同时寻优;
[0078]
步骤s5.2、选择样本点改善函数i(x)和样本点改善期望函数e[i(x)]作为采集函数,表达式为:
[0079]
i(x)=y
min-y(x)
[0080][0081]
式中,y
min
为采用群遗传算法优化得到的决策变量x对应的最小目标函数值; y(x)为决策变量x对应的目标函数值;为决策变量x的估计误差;为决策变量x对应的目标函数估计值;
[0082]
步骤s5.3、在解空间内进行二次采样,获得最大价值采样点。
[0083]
与现有技术相比,本发明具有以下优点:
[0084]
1)本发明提出的基于偏最小二乘kriging代理模型的仿真优化方法可以确定在大规模偶发拥堵和常发拥堵共存场景中最优的在途换路用户比例,跟真实场景下的交通拥堵路况,提高了模型预测的精确度;
[0085]
2)本发明使用偏最小二乘kriging模型作为中观仿真模型的代理模型,与常用的kriging模型相比,该模型在高维空间中的计算复杂度更低,且模型的预测精度更高;
[0086]
3)本发明提出的基于偏最小二乘kriging代理模型的仿真优化算法可以高效解决较高维度的atis的设计问题;
[0087]
4)本发明使用仿真模型作为优化方案的评价工具,能够模拟交通系统的动态演变
过程,并且优化方法不依赖于某种具体的仿真模型,具有较高的可移植性。
附图说明
[0088]
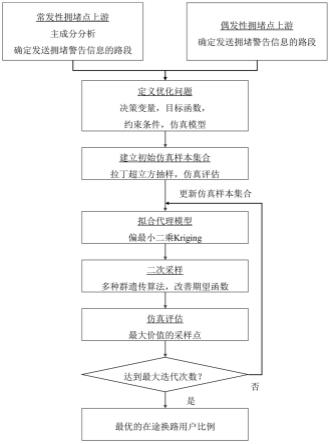
图1为本发明的流程示意图;
[0089]
图2为本发明实施例中a市徐汇区路网的示意图;
[0090]
图3为本发明实施例中常发性拥堵节点或路段的上游路段示意图;
[0091]
图4为本发明实施例中交通需求标定结果的示意图;
[0092]
图5为本发明实施例中地面主干道交通流模型参数标定结果的示意图;
[0093]
图6为本发明实施例中快速交通流模型参数标定结果的示意图;
[0094]
图7为本发明实施例中优化方案与基准方案在路段平均速度上的差异图;
[0095]
图8为本发明实施例中优化方案与基准方案在路段平均行程时间上的差异图;
[0096]
图9为本发明实施例中优化方案与基准方案在网络排队车辆总数上的差异图。
具体实施方式
[0097]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
[0098]
实施例
[0099]
如图1所示,本实施例提供了一种基于偏最小二乘kriging模型的路径诱导方法,该方法包括以下步骤:
[0100]
步骤s1、基于实际的交通供给、需求及突发交通状况信息,确定需要发送“前方拥堵警告”信息的拥堵上游路段,具体为:
[0101]
步骤s1.1:偶发性拥堵节点或路段的拥堵上游路段直接确定,即选择拥堵节点或路段上游上下匝道附近的路段作为偶发拥堵的上游路段la。
[0102]
步骤s1.2:常发性拥堵节点或路段的拥堵上游路段通过主成分分析法确定,包括三个步骤:路段选取、路段降维以及路段筛选。
[0103]
路段选取具体为通过路段速度损失率函数选择拥堵节点或路段上游的所有路段中速度损失较大的路段。路段速度损失率可以判断该路段的车流拥堵程度,其形式如下,其中li为第i条路段的速度损失率,t为总的时间片段数,为第i条路段在t时间片段的速度,v
i,lim
为第i条路段的限速。
[0104][0105]
选取整个网络中速度损失率较大的路段及其上游路段作为初始选取的上游路段l
b,1
。使用中观仿真技术分别计算初始选取路段l
b,1
上的在途换路用户比例在 10%、20%、30%、40%、50%、60%、70%、80%、90%、100%时的系统总出行时间。
[0106]
路段降维具体为使用主成分分析法对初始选取的路段结果l
b,1
进行降维。定义 8个变量,y
1-y8。其中,y1为各在途换路用户比例下系统总出行时间减少量平均值,y2为系统总出行时间减少量的最小值,y3为系统总出行时间减少量的最大值, y4为系统总出行时间
减少量的上四分位数,y5为系统总出行时间减少量的中位数, y6为系统总出行时间减少量的下四分位数,y7为各在途换路用户比例下系统总出行时间减少量的极差,y8为各在途换路用户比例下系统总出行时间减少量总和。对该 8个变量进行主成分分析,可以将多指标转换为少数几个特征性指标,并借助综合评价得分对不同路径诱导方案的效果进行评价,步骤如下:
[0107]
1)对数据进行标准化,得到标准化阵z,其中z
ij
为矩阵z的元素,sj分别为变量yj对应样本的均值和标准差:
[0108][0109]
2)计算标准化阵z的协方差矩阵r,其中为r
ij
矩阵r的元素,n为样本容量:
[0110][0111]
3)计算矩阵r的特征值λ1≥λ2≥
…
≥λn≥0及对应特征向量u1,u2,
…
,un;
[0112]
4)计算各主成分yi的贡献率bj以及y1,y2,
…
,y
p
累计贡献率α
p
:
[0113][0114][0115]
选取特征值大于1,累计贡献率约达到90%的成分作为主成分。
[0116]
5)获得成分得分系数矩阵,计算各成分得分;之后通过旋转后的方差百分比与各成分得分求出最后的综合评价得分。最终得到降维后的上游路段l
b,2
。
[0117]
路段筛选具体为,引入候选路段的最短间距限制,保证得到的拥堵上游路段具有一定的位置间隔。从降维后的上游路段l
b,2
中进行筛选,将筛选后的结果作为常发性拥堵的上游路段lb。
[0118]
步骤s1.3、将偶发拥堵的上游路段la和常发性拥堵的上游路段lb结合,得到整个网络的拥堵上游路段l。
[0119]
步骤s2、确定以拥堵上游路段的在途换路用户比例为决策变量、以最小化系统总出行时间为优化目标的连续优化问题,并构建用于计算目标函数值的中观交通仿真模型,具体为:
[0120]
决策变量为n个上游路段在途换路的用户比例。目标函数为系统总出行时间的期望f(x)最小。由于仿真结果中含有较大的随机因素,且f(x)无法通过显式表达,所以本实施例将p次重复仿真所得系统总出行时间的平均值y(x)作为系统总出行时间期望f(x)的近似估计值,将原目标函数转化为近似目标函数。优化数学模型具体如下:
[0121]
决策变量:
[0122]
x=[x1,x2,...,xn]
t
[0123]
其中1,2,...,n表示拥堵上游发布atis信息的路段,即s1中确定的拥堵上游路段 l,xi表示第i个路段上在途换路用户的比例。
[0124]
原目标函数:
[0125][0126]
其中f(x)为系统总出行时间的期望;为系统总出行时间,包含随机因素,为一个随机变量;r,r分别为用户出行的起点节点及所有起点节点的集合;s,s分别为用户出行的终点节点及所有终点节点的集合;t,t分别为用户的出发时刻及所有出发时刻的集合;为高峰时段t时刻从起点r到终点s的总出行量;为高峰时段t时刻从起点r到终点s的平均出行时间,与x有关;为非高峰时段t时刻从起点r到终点s的总出行量;为非高峰时段t时刻从起点r到终点s的平均出行时间,与x无关。
[0127]
近似目标函数:
[0128][0129]
其中y(x)为系统总出行时间期望的估计值;p为重复仿真的次数;为的一个取值,可在随机因素的取值为时运行一次仿真得到该值。
[0130]
约束条件:
[0131]
x
min
≤x≤x
max
[0132]
其中x
min
=[0,0,...,0]
t
,为在途换路用户比例的下限;x
max
=[1,1,...,1]
t
,为在途换路用户比例的上限。
[0133]
步骤s3、基于拉丁超立方抽样在解空间中均匀抽取样本,并带入所述中观交通仿真模型计算样本的目标函数值,建立仿真样本集合,具体为:
[0134]
基于拉丁超立方抽样在决策变量的解空间中均匀采样,得到样本点集 {x1,x2,...,xd},利用式(3)获得每个样本点对应的目标函数值{y(x1),y(x2),...,y(xd)},由此建立初始仿真样本集合d:
[0135]
d={[x1,y(x1)],[x2,y(x2)],...,[xd,y(xd)]}
[0136]
步骤s4、利用仿真样本集合,建立基于偏最小二乘kriging模型的代理模型,具体为:
[0137]
步骤s4.1、利用仿真样本集合,建立仿真模型的基于偏最小二乘kriging模型的代理模型,模型形式如下:
[0138]fm
(x)=μ+ε(x)
[0139]
式中,μ是目标函数的平均值;ε(x)为估计误差,是一个均值为0,方差为σ2的高斯过程,满足如下的协方差关系:
[0140]
cov[ε(x(i)),ε(x
(j)
)]=σ2ψ(x(i),x
(j)
)
[0141]
利用偏最小二乘技术将决策空间的维度压缩到可接受的范围。整合偏最小二乘的降维结果和kriging的相关矩阵,得到如下的偏最小二乘kriging基函数ψ:
[0142]
[0143]
其中θ=[θ1,θ2,...,θh]
t
为缩放系数向量,可以使得n维决策变量每个维度的基函数具体不同的宽度。pls降维后的变量个数h远小于原变量个数n,模型中需要估计的参数个数减少,仿真优化算法的效率将显著提升。
[0144]
基于仿真样本集合d中的观测数据可以得到如下的相关矩阵:
[0145]ri,j
=ψ(x(i),x
(j)
)
[0146]
任意决策变量x*的目标函数估计值及其估计误差为:
[0147][0148][0149]
式中:
[0150]
r={cov[ε(x*),ε(x
(1)
)],...,cov[ε(x*),ε(x
(d)
)]}
t
[0151]
y={y(x1),y(x2),...,y(xd)}
t
[0152]
步骤s4.2、代理模型的初始值设置。
[0153]
建立偏最小二乘kriging代理模型需要设置初始参数值θ0。利用网格搜索法和交叉验证法确定初始参数值的最佳取值,步骤如下:
[0154]
1)将仿真样本集合d随机分为k份,得到子样本集合:d1,d2,...,dk。
[0155]
2)将θ0的取值网格化,θ={0.001,0.01,0.1,1,10}。
[0156]
3)将θ中的值逐一赋给θ0,使用k折交叉验证计算代理模型的平均预测误差。
[0157]
4)选择θ中平均预测误差最小的参数作为θ0的初始参数值。
[0158]
步骤s5、基于代理模型,利用群遗传算法和改善期望函数在解空间内进行二次采样,获得最大价值采样点,具体为:
[0159]
s5.1:利用代理模型辅助的进化算法进行搜索。基于仿真模型的目标函数具有非线性、计算成本高的特点,因此各种代理模型辅助的进化算法常被用来求解该类优化问题。本方法使用代理模型辅助的多种群遗传算法进行寻优,引入不同的种群同时寻优,可以提升算法在解空间中的搜索能力。
[0160]
s5.2:由于代理模型是对仿真模型的有限近似,故代理模型对目标函数值的预测结果通常存在误差。采集函数可用来评估二次采样阶段得到样本点的潜在价值。选择样本点改善函数i(x)和样本点改善期望函数e[i(x)]作为采集函数,改善期望值可以描述该样本点比仿真样本集合d中最优解y
mi
n更优的期望。
[0161]
i(x)=y
min-y(x)
[0162][0163]
式中,y
min
为采用群遗传算法优化得到的决策变量x对应的最小目标函数值; y(x)为决策变量x对应的目标函数值;为决策变量x的估计误差;为决策变量x对应的目标函数估计值;
[0164]
步骤s6、将最大价值采样点带入所述中观交通仿真模型中计算其目标函数值,并更新仿真样本集合;
[0165]
步骤s7、判断是否达到最大迭代次数,若否,则返回步骤s4,否则结束输出当前得到的最优解输出当前得到的最优解,即各拥堵上游路段所需的最优在途换路用户比例。
[0166]
接下来,选择a区路网作为实施例验证对象,对本发明的方法进行验证。
[0167]
该路网面积约60平方千米,包含a中环高架(西南侧)、内环高架(西南侧)、沪闵高架三条快速路,及所有高架上下匝道和地面主干道,共有134个交通小区、 372个节点、962条路段(如图2)。设置如下的拥堵场景:a、b、c三处同时发生了不同严重程度的交通事故,事故所在路段的通行能力分别下降100%、50%、 25%,事故的存在时间为上午7:00~8:00;d、e、f为路网中存在的三个常发性拥堵节点,高峰时段(上午7:00~10:00)这些节点附近的通行效率将明显下降。为了引导拥堵路段上游的用户避开拥堵重新规划路线,在相关区域共设置了18个布有 atis的拥堵警告区(g~x),高峰时段经过该区域的部分用户将收到前方的实时路况信息。atis设备包括但不限于可变信息标志(vms)、导航系统、车载无线通讯系统,所有可以将前方即时拥堵信息传递给上游的通讯方式均可被认为是 atis设备。
[0168]
步骤s1中确定常发性拥堵节点或路段的拥堵上游路段过程为:
[0169]
利用dynust中观交通仿真软件进行交通仿真,可得在没有路径诱导方案的情况下各路段在仿真时间段内的车流速度。通过路段速度损失率可以判断出在仿真过程中的车流拥堵程度,选取其中损失率最大的100条路段及其上游路段(共计371 条)作为初始决策空间进一步分析,分别求出其在10%、20%、30%、40%、50%、 60%、70%、80%、90%、100%在途换路用户比例下的系统总出行时间减少量。
[0170]
利用kmo和巴特利特检验进行因子分析前的数据适用性验证。分析结果如表 1所示,根据分析结果可知kmo值为0.574大于0.5,巴特利特球形度检验显著性为0.000小于0.05,说明适合进行主成分分析。
[0171]
表1
[0172][0173]
表2为y
1-y8八个指标的方差贡献率可知,第一、二、三主成分方差贡献率分别为58.178%、24.967%、8.551%,累计方差贡献率达91.696%。第一主成分(z1) 主要反映平均值、总和、均值、极差等综合性数据,第二主成分(z2)主要反映最大值和上四分位数等数值较大数据,第三主成分(z3)主要反映最小值和下四分位数等数值较小数据,三个主成分各自具有代表性。
[0174]
表2
[0175][0176]
由主成分得分系数矩阵可得各主成分得分,同时以主成分方差贡献率为权重,构建综合评价得分函数:z=0.534
×
z1+0.233
×
z2+0.233
×
z3,得出各路段综合得分和排名,其中综合得分最高的前十条路段如表3所示。
[0177]
表3
[0178][0179]
按照pca处理得到的综合评价得分由高到低依次将路段加入到候选的拥堵上游路段集合中,若待加入的候选路段与已存在的候选路段间最短间距小于最小间距阈值(本实施例设为500m)时,则跳过该路段继续进行,直至候选集合大小达到目标容量。得到的常发性拥堵的上游路段lb如图3所示。图中实线为经过路段筛选后最终确认的拥堵上游路段lb,虚线为不满足最小间距阈值设定而被筛选掉的路段。
[0180]
步骤s1中确定偶发性拥堵节点或路段的拥堵上游路段过程为:将所有偶发性拥堵节点或路段上游上下匝道附近的路段作为偶发拥堵的上游路段la。
[0181]
如图2所示,将偶发拥堵的上游路段la和常发性拥堵的上游路段lb结合,得到整个网络的拥堵上游路段l,具体共包含以下的18条路段:g、h、i、j、k、l、 m、n、o、p、q、r、s、t、u、v、w、x。
[0182]
步骤s2中定义的优化问题如下:
[0183]
决策变量:
[0184]
x=[x1,x2,...,xn]
t
[0185]
原目标函数:
[0186][0187]
近似目标函数:
[0188][0189]
约束条件:
[0190]
x
min
≤x≤x
max
[0191]
其中n的值为18,p的值为3。
[0192]
步骤s2中建立徐汇区路网仿真模型的过程如下:
[0193]
利用粒子滤波算法从徐汇区卡口电警数据中重构出机动车轨迹数据,经过高架线圈数据的修正(动态od反推),共得到约23万条机动车轨迹数据。图4为标定需求后的仿真结果与实测路段流量的比较,可以看出,需求标定结果较理想。基于上述供给和需求数据建立dynust中观仿真模型,仿真时间段为上午6:00~11:00。 dynust是目前应用较为广泛的基于中观交通仿真的动态交通分配软件,本实施例中仅使用其中的中观仿真功能。假设所有用户均为en-route类型,即所有车辆均支持在途选路。同时,本实施例对地面主干道和快速路的交通流模型分别进行了标定,标定结果如表4。
[0194]
本实施例在dynust中观仿真模型中选用形如下式的交通流模型:
[0195][0196]
其中vi当前速度,ki为当前密度,v0为路段的最低速度,vf为路段的自由流速度,k
jam
为拥挤阻塞密度,α、β分别为需要标定的模型参数。图5和图6分别为地面主干道与快速路的交通流模型的标定结果,其中散点代表观测值,虚线代表标定得到的交通流模型,可以看出,交通流模型的标定结果较理想。
[0197]
表4
[0198] αβ地面主干道2.400.80快速路4.521.00
[0199]
步骤s3中基于拉丁超立方抽样共获得了90个初始样本,将这些样本带入仿真模型进行计算其目标函数值,最终可以得到仿真样本集合。
[0200]
步骤s4中基于仿真样本集合建立了偏最小二乘kriging的代理模型。本实施例选择了以下五个指标(均方根误差(rmse)、归一化均方根误差(nrmse)、最大误差(mae)、归一化最大误差(nmae)、拟合代理模型所需的计算时间(cpu)) 来比较偏最小二乘kriging代理模型和普通kriging代理模型的预测精度和计算效率差异,比较结果如表5。可以看出,与普通kriging模型相比,偏最小二乘kriging 模型预测结果的均方根误差降低近20%,最大误差降低25%,且所消耗的计算资源仅为krg的4%。偏最小二乘kriging模型在预测精度和计算效率上都明显优于普通kriging模型。
[0201]
表5
[0202]
代理模型rmsemaenrmsenmaecpukrg40 814.0568 697.421.27%2.5863.44skpls32 832.6342 544.071.02%1.932.53s
[0203]
注:cpu在i9-10900 2.81ghz的计算机上测得。
[0204]
步骤s5中利用多种群遗传算法和改善期望函数在解空间内进行二次采样,获得最大价值的采样点。本实施例中遗传算法的细节如下:采用采用二进制格雷编码,决策变量的编码精度精确到小数点后2位,种群选择过程为随机选择,dna交叉方式为两点交叉,采用二进制染色体的变异算子。
[0205]
由于本发明使用了启发式算法,求解过程具有一定的随机性,因此本实施例运行了该算法三次,最终得到了三种路径诱导系统的优化设计方案,如表6所示。
[0206]
表6
[0207][0208]
表7整理了三种优化方案和基准方案(无路径诱导,所有的在途换路用户比例均为0)下的网络通行效率。与基准方案相比,最优方案可以使网络中系统总出行时间节省约3.9
×
105分钟,平均每位用户在网络中的通行时间减少约1.8分钟,整个网络的通行效率提升近11%。三种方案的效果十分类似,仿真优化方法的鲁棒性较强。
[0209]
表7
[0210][0211]
图7、图8、图9分别比较了在最优方案和基准方案下网络在高峰时段的宏观性能差异,其中图7为路段加权平均速度差异、图8为路段加权平均行程时间差异、图9为网络中排队车辆总数的差异。可以看出与基准方案相比,高峰时段内最优方案的平均速度更大、行程时间和网络中的排队车辆数更小。在事故发生的时段前后 (7:30~8:30),两种方案的差异最明显。可见最优方案可以显著缓解高峰期交通拥堵。
[0212]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利
要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1