一种工业无人生产现场智能安全监管装置的制作方法
1.本发明涉及一种工业无人生产现场智能安全监管装置。本装置通过边缘计算以锁定风险源、评估风险因素并进行应对,较传统在远端进行视频识别及人工开展应急管理的模式相比,可以更为快捷、精准地进行一体化风险识别与管控,在第一时间排除风险。
背景技术:
2.安全是工业生产过程的永恒主题。随着企业生产规模的发展,通过数字化、信息化、精细化管理来保障企业安全、高效生产变得越来越重要。但当前行业里尚有不少企业缺乏实时高效的智能安装监管手段,现有的监管技术普遍存在以下几个问题:
3.1)传统的视频监控系统未能高效使用,异常信息必须通过人员在线同步观察或者回放查询,再经过人工全程分析判断才能得到。既需要投入大量的时间和精力,也无法全面实时掌控现场安全情况。
4.2)难以实时监控无人化生产区域、核心生产设施附近车辆、操作装置的工作位置、作业规范、行动轨迹;难以对突发的人员误入或异物闯入进行及时识别和干预。
5.3)难以及时判断并对误入危险区域、不合规操作、突发灾情等紧急情况进行处置。
技术实现要素:
6.为克服上述缺陷,本发明的目的在于提供一种工业无人生产现场智能安全监管装置。
7.为达到上述目的,本发明一种工业无人生产现场智能安全监管装置,包括
8.摄像单元,由采集视频信号的光学摄像头和可旋转装置构成,可旋转装置在信号驱动下可以带动摄像头上下左右全方位旋转;
9.边缘计算单元,由存储模组和计算模组组成;其中
10.存储模组实时接收摄像单元的视频文件;
11.计算模组:包括主程序模块、目标检测模块、风险识别模块、知识检索模块、风险处置模块和事件管理模块;其中,
12.目标检测模块通过对视频的实时分析,完成画面中可能存在风险源的捕获、识别;
13.风险识别模块对风险源进行风险级别的判定;
14.知识检索模块根据风险源类型和当前状态检索风险应对表文件,得到风险处置的建议;
15.风险处置模块将风险处置建议转化为告警信息,输送给告警单元;事件管理模块对本次风险事件进行记录,包括事件发生时间、结束时间、风险要素等,并将视频数据添加入到存储模组中;
16.边缘计算单元的计算模组执行:
17.p1、读取存储模组的风险应对表文件和配置文件和风险等级表文件,并执行目标检测程序;
18.p2、当目标检测程序发现风险源时,判定出风险源s的类型;
19.p3、执行风险评估模块代码,得出风险源的风险等级p;
20.p4、根据风险源的大类进行风险应对:
21.p4-1、如果是a类风险源,执行知识检索模块,根据s和p,得到音频文件z的名称;风险处置模块从第四存储模组读取音频文件z,并将其发送给告警单元;告警单元播放音频文件z;
22.p4-2、如果是b类风险源,风险处置模块根据风险等级,按代码约定的声音强度,驱动告警单元的声光报警器发出蜂鸣警示音;
23.p5、循环执行p2到p4,直到目标检测模块发现风险源消失;
24.p6、事件管理模块把本次风险事件的视频片段,以及发生时间、结束时间、风险源类型、风险等级写入到存储模组中;
25.进一步的,所述的目标检测模块中还加入目标跟踪算法;当检测到危险源时自动启动目标跟踪算法,并驱动摄像单元的可旋转装置,将摄像头保持对风险源聚焦以跟踪目标。
26.进一步的,所述的存储模组包括第一存储模组、第二存储模组、第三存储模组、第四存储模组、第五存储模组;其中,
27.第一存储模组:存放系统的计算程序;
28.第二存储模组:存放风险应对表文件;
29.第三存储模组:存放目标检测算法配置文件,以及风险等级表文件;
30.第四存储模组:存放事先录制好的语音警告音频文件;
31.第五存储模组:存放来自摄像单元的视频数据;
32.其中,第五存储模组包括两个分区:1)原始数据分区,按时间顺序滚动存储摄像头所采集到的视频数据;2)证据数据分区,当目标检测到危险源时,以先进先出方式存储本段视频数据;以及事件管理模块将风险事件的视频片段,以及发生时间、结束时间、风险源类型、风险等级写入到第五存储模组的证据数据分区中。
33.本发明适用于对具有风险性的工业无人生产现场进行智能管理,其通过边缘计算以锁定风险源、评估风险因素并进行应对,较传统在远端进行视频识别及人工开展应急管理的模式相比,可以更为快捷、精准地进行一体化风险识别与管控,在第一时间排除风险。
附图说明
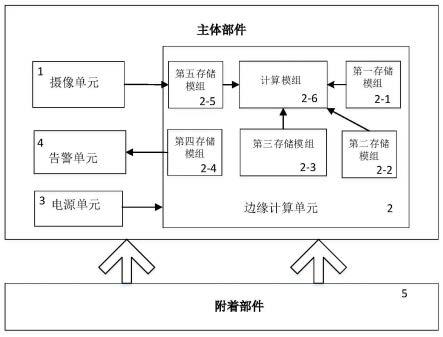
34.图1为本发明一种工业无人生产现场智能安全监管装置的组成示意图;
35.图2为本发明运行过程中各单元的协作关系说明图。
具体实施方式
36.下面结合附图和实施例对本发明做进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部内容。
37.在本发明的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的
方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
39.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
40.图1为本发明工业无人生产现场智能安全监管装置的示意图,结构上包括了摄像单元1、边缘计算单元2、电源单元3、告警单元4组成的主体部件,以及把主体部件安装到某个地点所需的具备固定、支撑、保护等效用的附着部件5。
41.摄像单元1由采集视频信号的光学摄像头和可旋转装置构成。可旋转装置在信号驱动下可以带动摄像头进行上下左右全方位旋转。
42.边缘计算单元2由第一存储模组2-1、第二存储模组2-2、第三存储模组2-3、第四存储模组2-4、第五存储模组2-5、计算模组2-6组成。具体为:
43.第一存储模组2-1:存放系统的计算程序。
44.第二存储模组2-2:存放风险应对表文件。
45.第三存储模组2-3:存放目标检测算法配置文件,以及风险等级表文件。
46.第四存储模组2-4:存放事先录制好的语音警告音频文件。音频文件采用wav格式,也可以采用wma或mp3等其他音频格式。
47.第二、三、四存储模组合用一张高速tf卡作为介质。
48.第五存储模组2-5:存放来自摄像头的视频数据。包括两个分区:1)原始数据分区,按时间顺序滚动存储摄像头所采集到的视频数据。2)证据数据分区,当目标检测到危险源时,以先进先出方式存储本次视频数据。第五存储模组采用大容量tf卡作为介质。
49.计算模组2-6:包括主程序模块、目标检测模块、风险识别模块、知识检索模块、风险处置模块和事件管理模块。其中,目标检测模块通过对视频的实时分析,完成画面中可能存在风险源的捕获、识别;风险识别模块对风险源进行风险级别的判定;知识检索模块通过查询风险应对表得到风险处置的建议;风险处置模块将风险处置建议转化为告警信息,输送给告警单元;事件管理模块对本次风险事件进行记录,包括事件发生时间、风险要素、处置建议、结束时间,并将视频数据添加入到第五存储模组的证据数据分区中。
50.可选地,目标检测模块中还加入目标跟踪算法。当目标检测到危险源时,同时启动目标跟踪算法,并驱动摄像单元的可旋转装置,将摄像头聚焦于风险源进行目标跟踪。
51.告警单元由音频驱动模块、喇叭、声光报警器构成。
52.电源单元为其他单元提供电源。
53.下面以该装置在钢铁、煤业等工业生产中对胶带传运作业区进行现场管理为例进行说明。根据现场情况,将附着部件固定在便于监控胶带传运的合理位置,例如工业胶带机通廊内、胶带衔接切换区域等。
54.列举出监控场景需要防控的风险源列表s={s1s2…
sn},风险源si可以是人(例如人员进入禁入区域)、物体(例如异物卷入)或某种事件(例如胶带跑偏、突发撕裂)。对所列的各种风险源分别采集足够数量的图像,采用机器视觉算法进行训练,得到目标检测模型参数,并将其以配置文件的方式存入第二存储模组。
55.1)基于专家知识,依次对在监控场景中出现风险源si这一事件,以场景工况c、风险源位置d、风险源滞留时间t为条件,评估此联合条件下风险源si的风险等级 f(s=i|c=cj,d=dk,t=tb)并简记为p
i|j,k,b
,其中cj、dk、tb依次是场景工况c、风险源位置d、风险源滞留时间t按预定规则进行量化后的可取值,f是风险评估规则,生成风险等级子表pi。所有i的pi合并构成风险等级表p。
56.对pi中每个元素制定出风险处置方法o
i|j,k,b
,各种风险处置方法构成集合o,对于每一项加到集合o的风险处置方法,分别通过语音合成或人工录制的方式生成一条具有唯一性名称的音频文件。需要说明的是,对于不同的组合(i,j,k,b),采用的风险处置方法的可以是相同的,即映射到同一个音频文件。
57.将风险源si在风险等级评估为p
i|j,k,b
时采取的风险处置方法o
i|j,k,b
所对应的音频文件名称记为z
i|j,k,b
。si、p
i|j,k,b
和z
i|j,k,b
构成三元组,所有{s、p、z}三元组构成风险应对表,存储到第二存储模组。
58.本装置运行过程中各单元的协作关系如图2所示,并具体解释如下:
59.s1、电源单元启动并处于持续工作状态;
60.s2、摄像单元对所监控场景进行视频信号采集,把视频数据送至第五存储模组的原始数据分区存储;
61.s3、边缘计算单元的计算模组从第一存储模组中读取包括主程序、目标检测模块、风险评估模块、知识检索模块、风险处置模块、事件管理模块在内的程序代码;
62.s4、在主程序的驱使下,读取第二存储模组的风险应对表文件和第三存储模组的配置文件和风险等级表文件,并执行目标检测模块代码;
63.s5、当目标检测程序发现风险源时,判定出风险源类型s;
64.可选地,同步启动目标跟踪算法,并驱动摄像单元的可旋转装置,将摄像头聚焦于风险源进行目标跟踪;
65.s6、执行风险评估模块代码,具体地,对场景工况c、风险源位置d、风险源滞留时间t 进行判别,根据判别向量(c,d,t)=(j,k,b)查找风险等级表,得出风险源的风险等级p;
66.s7、根据风险源的大类进行风险应对:
67.s7-1、如果是a类风险源,执行知识检索模块,根据s和p,得到音频文件名z。风险处置模块从第四存储模组读取音频文件z,并将其发送给告警单元。告警单元由音频驱动模块通过喇叭播放此音频文件。
68.s7-2、如果是b类风险源,风险处置模块根据其风险等级,按模块里已约定的声音强度,驱动告警单元的声光报警器发出蜂鸣警示音。
69.s8、循环执行s5到s7,直到目标检测模块发现风险源消失;
70.s9、事件管理模块把本次风险事件的视频片段,以及发生时间、结束时间、风险源类型、风险等级写入到第五存储模组的证据数据分区中。
71.在本说明书的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实
施例或示例中以合适的方式结合。
72.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1