一种自然灾害检测装置及预测方法
1.本发明涉及灾害检测领域,具体涉及一种具有多种类灾害检测以及预测功能的装置。
背景技术:
2.目前的灾害检测有如下特点:第一、种类单一,集成度不高,例如地震检测是专门单独的监测,而泥石流、洪水等等其余的地质灾害需要架设另外的检测装置;第二、灾害之间往往有着一定的相关性,比如暴雨或者地震往往是滑坡灾害的关键原因,地震和风暴的相关性最强,极度干旱和深林火灾。不同的灾害之间的相关性因为不同检测设备和数据的分离,造成统计分析上的困难。第三、数据分析依靠远距离的数据处理中心,大量数据在传输过程中也会依赖通信设备的高度稳定,假如数据传输过程中发生中断,则设备需要检修或者重新进行大量数据的传输,而往往灾害检测的设备位置较为偏僻,检修会浪费大量的物力和财力,灾害检测装置依赖不稳定的外部环境会使得灾害检测装置本身的稳定性出现问题,使得灾害识别的准确率下降;如果灾害使得检测装置发生损坏,灾害发生前收集的关键数据也会丢失。
技术实现要素:
3.本发明所要解决的技术问题:针对于现有技术的上述不足,本发明提供了一种电路高度集成的、内置神经网络模型可独立运算的、可计算不同灾害之间的相关性的神经网络以及外围电路结构。神经网络的权重参数可通过通讯模块与其他设备互相共享,通过自身运算权重参数以及服务器集合大量数据进行运算的权重参数进行对比用于调整自身神经网络的计算权重;同时,利用灾害之间相关性分析和计算来增加预测的准确性,通过当地灾害数据的归一化相关性系数表格,利用该表格进行多灾害的数据样本训练,从而增加综合灾害预测的准确性。该发明解决了现有设备种类单一、灾害相关系分析困难、数据和运算分离导致的检测不及时,以及缺少实时预测功能等缺点。
4.为实现上述目的,本发明采用如下技术方案:
5.一种自然灾害检测装置,包括运算核心1、定位通讯模块3和电源模块,运算核心1通过传感器总线连接多个传感器2、通过视频总线连接摄像头5,运算核心1采用现场可编程逻辑门阵列编程构成bp神经网络模块1-6、数据存储模块1-5传感器数据处理模块1-3和视频信号处理模块1-4。
6.传感器总线接入传感器输入输出i/o1-1,传感器数据处理模块1-3对传感器输入输出i/o的1-1输入的传感器信号做处理,处理后的传感器数据传入数据存储模块1-5和bp神经网络模块1-6。
7.视频总线接入视频信号输入输出i/o1-2,视频信号处理模块1-4对视频信号进行压缩、降噪处理,处理后的视频数据传入数据存储模块1-5和bp神经网络模块1-6,传感器数据和视频数据会互相标记,组成一个整体信号存储。
8.为每个传感器2或摄像头5采集的数据赋予权重值,输入bp神经网络模块1-6进行运算,预测自然灾害的发生并依据自我学习算法调整权重参数。
9.定位通讯模块3提供自然灾害检测装置的经纬度、海拔和时间信息,连同传感器数据、视频数据和权重参数发送给其他相邻的自然灾害检测装置。
10.电源模块分为220v市电供电和太阳能供电,并包含一块应急使用电池以供突发断电以及破坏性灾害中使用,如果遭遇突发性破坏灾害装置会寻找最近的运行正常的几个检测装置发送最近一段时间的所有传感器数据和视频数据,作为备份。
11.预测方法是:首先训练各传感器单元的数据对应不同灾害的权重值,然后输入当前检测数据和权重值计算是否发生灾害。
12.权重值的训练方法为:
13.a输入传感器数据x和相关性系数z;
14.b为神经网络训练隐藏层的权重矩阵qij赋予权重
15.c将数据x与权重矩阵qij运算获得输出z’并计算误差z-z’;
16.d判断z-z’是否小于人为规定阈值y,如果不是,则逆向传播误差并调整
17.隐藏层各层权重,并输出qij’;
18.e若误差z-z’达到小于人为规定阈值y,则训练成功,记录权重参数
19.qij;
20.首先进行单灾害的训练与识别,等待单灾害训练完毕,准确率符合一定阈值要求后,然后利用灾害相关性系数和2个灾害同时发生时传感器数据进行训练,训练的权重参数先代入一个灾害的权重参数q1进行计算,看是否收敛,如最大迭代次数内结果收敛,则记录下该权重参数q1’;之后代入另一个灾害的权重参数q2计算,结果收敛后记录q2’,之后比较两种计算路径的权重参数之差q1
’‑
q2’是否在期望范围之内,如果是,则两灾害预测训练成功,记录下权重参数q12。
21.三灾害的训练需要计算分别代入q1、q2、q3,q12,q13,q23进行计算,最后比较q1
‘
、q2’、q3
‘
,q12’,q13
‘
,q23’之间的综合误差,如果综合误差在期望范围之内,则三灾害预测训练成功。
22.归一化相关性系数表格计算方法为:先进行预测i个区域附近的灾害频次统计表h,得到h=(h1,h2,h3,
…
,hk,
…
,hi),其中第k个区域灾害统计频次 hk=(a1,a2,a3,
…
,an,
…
am,
…
,aj),而an是灾害n发生的频次。利用灾害频次统计表h进行灾害n和灾害m的相关性计算,可得到相关性系数znm,公式为:
[0023][0024]
其中,是am的平均值,是an的平均值。
[0025]
本发明的有益效果:
[0026]
该发明提出了利用灾害之间相关性分析和计算来增加预测的准确性,通过当地灾害数据的归一化相关性系数表格,利用该表格进行多灾害的数据样本训练,从而增加综合灾害预测的准确性。并且,每个设备训练的权重参数q可以通过数据通讯系统互相共享,增
加了训练样本的数量,提高训练的准确性以及预测的准确性。
[0027]
本发明的优势在于通过运算电路的高度集成,使得灾害检测装置不仅拥有检测能力同时也具有运算能力,当训练完成的时候进行灾害的预测功能;并且自身具备的神经网络可以进行灾害相关性表格计算,进一步提升预测功能的准确性和鲁棒性;在装置自身受到破坏性灾害影响而将失去功能之前,比如装置预测到某些破坏性灾难即将发生的时候,向最近的数个检测装置传输应急数据,以避免关键数据的丢失。这种预测装置的核心运算单元集成度高,性能稳定;同时可按需求配置不同的传感器,适应不同灾害检测的需求。可以用于大规模的灾害预测计算,有较高的实用价值和生产价值。
附图说明
[0028]
图1为运算核心的功能框架图。
[0029]
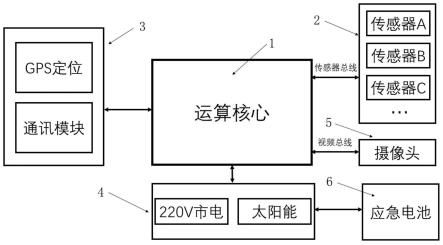
图2为本发明中灾害检测预测装置的系统结构框图。
[0030]
图3为于bp算法的灾害相关性系数算法流程。
[0031]
图4为归一化的灾害相关性系数表格。
具体实施方式
[0032]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0033]
实施例1:
[0034]
一种自然灾害检测装置,包括运算核心1、定位通讯模块3和电源模块,运算核心1通过传感器总线连接多个传感器2,传感器总线接入传感器输入输出i/o1-1,通过视频总线连接摄像头5,视频总线接入视频信号输入输出i/o1
‑ꢀ
2,运算核心1采用现场可编程逻辑门阵列编程构成bp神经网络模块1-6、数据存储模块1-5传感器数据处理模块1-3和视频信号处理模块1-4。
[0035]
传感器数据处理模块1-3对传感器输入输出i/o的1-1输入的传感器信号做处理,处理后的传感器数据传入数据存储模块1-5和bp神经网络模块1-6,视频信号处理模块1-4对视频信号进行压缩、降噪处理,处理后的视频数据传入数据存储模块1-5和bp神经网络模块1-6,传感器数据和视频数据会互相标记,组成一个整体信号存储。为每个传感器2采集的数据赋予权重值,输入 bp神经网络模块1-6进行运算,预测自然灾害的发生并依据自我学习算法调整权重参数。
[0036]
定位通讯模块3提供自然灾害检测装置的经纬度、海拔和时间信息,连同传感器数据、视频数据和权重参数发送给其他相邻的自然灾害检测装置。
[0037]
电源模块分为220v市电供电和太阳能供电,并包含一块应急使用电池以供突发断电以及破坏性灾害中使用,如果遭遇突发性破坏灾害装置会寻找最近的运行正常的几个检测装置发送最近一段时间的所有传感器数据和视频数据,作为备份。
[0038]
预测方法是:首先训练各传感器单元的数据对应不同灾害的权重值,然后输入当前检测数据和权重值计算是否发生灾害。
[0039]
权重值的训练方法为:
[0040]
a输入传感器数据和相关性系数(x,z);
[0041]
b为神经网络训练场赋予权重q;首先看是否有外接权重参数qa传入,
[0042]
如果有则直接赋值;没有则给一个初始值q0。
[0043]
c数据x与权重矩阵进行计算获得输出z’并计算误差z
[0044]-z’;
[0045]
d如果z-z’不满足阈值要求y,则逆向传播误差并调整各层权重;
[0046]
e若z-z’误差达到期望则训练成功,记录权重参数;若未达到期望则继续调整权重值重新计算,如果达到最大迭代次数依然误差较大则认为本次计算失败,停止。
[0047]
首先进行单灾害的训练与识别,等待单灾害训练完毕,准确率符合一定阈值要求后,然后利用灾害相关性系数和2个灾害同时发生时传感器数据进行训练,训练的权重参数先代入一个灾害的权重参数q1进行计算,看是否收敛,如最大迭代次数内结果收敛,则记录下该权重参数q1’;之后代入另一个灾害的权重参数q2计算,结果收敛后记录q2’,之后比较两种计算路径的权重参数之差q1
’‑
q2’是否在期望范围之内,如果是,则两灾害预测训练成功,记录下权重参数q12。
[0048]
三灾害的训练需要计算分别代入q1、q2、q3,q12,q13,q23进行计算,最后比较q1
‘
、q2’、q3
‘
,q12’,q13
‘
,q23’之间的综合误差,如果综合误差在期望范围之内,则三灾害预测训练成功。
[0049]
实施例2:
[0050]
如图1所示,本实施例中提供的运算核心功能框架图由采用现场可编程逻辑门阵列(field programmable gate array)编程构成,主要是分为了三个运算单元和一个数据存储区域。三个运算区域分别是传感器数据处理单元1-3、视频信号处理单元1-4、bp神经网络单元1-6。传感器数据处理单元的作用是将 1-1传感器输入输出i/o的传感器信号做处理,某一时间间隔内的传感器数据为:
[0051][0052]
其中,xi是t1到t2间隔的传感器数据均值,y
t
是某一时刻对应的传感器数值,n是这段时间内传感器记录的数据的数量。注意传感器的数据可能是多个维度,比如温湿度传感器具有两个维度的数据,加速度传感器具有三个维度。传感器数据标签从0开始,不同传感器以及传感器的不同维度赋予不同的i 值,这个唯一的编号称为传感器数据标签,而按编号依次组成的向量x,就是传感器数据集,作为神经网络的输入信号之一。一般来说,在本检测装置中,该标签不可变化。传感器数据处理后的数据集x,会存储到1-5数据存储模块中,并且传输到bp神经网络1-6中进行运算。而视频信号处理利用通用的视频处理方法,将1-2视频信号输入输出i/o的信号进行压缩,降噪处理。当传感器数据和视频信号处理完成时,传感器数据和视频数据会互相标记,组成一个整体信号存储到数据存储模块1-5里面。
[0053]
运算核心和外围电路组成的检测预测装置系统框图如图2所示,工作原理如下传感器模块群2通过传感器总线和运算核心1相连接,并将传感器数据输入到运算核心1中,通过上述的工作方式,将数据进行传感器标签的识别和数据处理,然后进行运算。摄像头5通过视频总线连接运算核心1,将视频信号输入到运算核心中。通讯模块3和运算核心1相连接,可以将1-5数据存储模块中的数据通过通讯模块传输,传输的数据包括上述存储的传感
器和视频数据的整体信号、权重参数等等,同时通讯模块3的gps定位系统可以提供该装置的经纬度、海平面高度,时间等等的物理信息。供电系统4和应急电池6分别提供了该装置的主供电和备用供电。在一般情况下,供电系统4给运算核心 1、传感器模块群2、通讯模块3、摄像头5提供电源,供电方式是220v市电供电;如果运算核心检测到特殊情况,会打开应急电池的供电开关,以保证设备不会突然断电知道特殊情况解除。而遇到突然断电的情况,太阳能和应急电池开关会打开,太阳能和应急电池同时给装置系统供电。
[0054]
图3和图4分别列出了系统神经网络运算流程和灾害相关性系数表格。相关系系数表格统计了检测地区的灾害发生的关联概率情况,例如当洪水发生时 (概率为100%),风暴发生的可能性为90%,发生概率较高。归一化相关性系数表格计算方法为:先进行预测i个区域附近的灾害频次统计表h,得到 h=(h1,h2,h3,
…
,hk,
…
,hi),其中第k个区域灾害统计频次 hk=(a1,a2,a3,
…
,an,
…
am,
…
,aj),而an是灾害n发生的频次。利用灾害频次统计表h进行灾害n和灾害m的相关性计算,可得到相关性系数znm,公式为:
[0055][0056]
其中,是am的平均值,是an的平均值。多次计算不同灾害之间相关性系数,最终得到相关系数z,如图4所示。
[0057]
本发明采用了一种基于向后传播神经网络的灾害传感数据分类算法,该算法是一种有监督的学习算法,因此在训练的前期需要结合人工和视频数据记录来找到灾害发生的时刻,从而找到灾害对应的传感器数据集样本,然后在将该数据集样本作用于神经网络的输入层,经过隐藏层(i行j列的权重矩阵)的处理后,传递到输出层,输出结果。将结果与期望的结果进行比较,如果没有达到要求的误差,则通过误差的逆向传播,将实际结果与期望的结果之间的误差在此经过隐藏层返回,获得各层的参考误差,然后作为修改各单元权重qij的依据。权重qij不断修改,网络就不断的再学习,最终达到较为准确的预测效果。
[0058]
神经网络的输入是以《x,z》这样的有序对给出的,其中x就是上述的传感器数据集,z是神经网络输出层的归一化相关性系数表格,每一个z= (z1,z2,z3,
…
,zk,
…
,zm),其中zk表示灾难k发生的概率,取值在0到1之间,越靠近1该灾难发生几率越大。
[0059]
神经网络的训练流程如下,首先进行单灾害的训练与识别,也就是不考虑灾害之间的相关性,z=(z1,z2,z3,
…
,zk,
…
,zm),其中zk表示灾难k发生的概率,z向量中只有一个zk为1,而其余都为0。通过图3的算法流程,记录权重参数qk,同时如果有相近地区的装置的权重参数qa的传入,可以先赋值权重参数q,再进行网络的训练,从而加快训练速度以及提高训练准确性。等待单灾害训练完毕,准确率符合一定阈值要求后,然后利用灾害相关性系数表格和2个灾害同时发生时传感器数据进行训练,训练的权重参数先代入一个灾害的权重参数q1进行计算,看是否收敛,如最大迭代次数内结果收敛,则记录下该权重参数q1’;之后代入另一个灾害的权重参数q2计算,结果收敛后记录q2’。之后比较两种计算路径的权重参数之差(q1
’‑
q2’)是否在期望范围之内,如果是,则两灾害预测训练成功,记录下权重参数q12。三灾害的训练以此类推,需要计算分别代入q1、q2、q3,q12,q13,q23进行计算,最后比较q1
‘
、q2’、q3
‘
,q12’,q13
‘
,q23’之间的综合误差,如果综合误差在期望范围之内,则
三灾害预测训练成功。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1