一种基于物联网的LED联动管理方法及系统与流程
一种基于物联网的led联动管理方法及系统
技术领域
1.本技术涉及led技术领域,尤其是涉及一种基于物联网的led联动管理方法及系统。
背景技术:
2.地下停车场是指建筑在地下用来停放各种大小机动车辆的建筑物,主要由若干停车位、通道、坡道或机械提升间、出入口以及调车场地等组成。地下停车场充分利用地下空间,有效缓解了地上停车难的问题。地下停车场内设有若干用于照明的led灯,当车辆进入地下停车场时进行停车时,仅需找到空置停车位并进行停放即可。
3.随着大型地下停车场的兴建,且部分大型停车场占用多层空地,当车辆驶入大型地下停车场并进行停放后,车辆的驾驶者离开地下停车场再返回时,由于地下停车场的led灯仅提供照明作用,使驾驶者仅可以通过地下停车场墙壁上或柱体上粘贴的纸质标识寻找车辆,耗费大量时间,因此,申请人认为,目前的地下停车场存在找车难的技术问题。
4.申请内容为了便于用户在地下停车场寻找车辆,本技术提供一种基于物联网的led联动管理方法及系统。
5.第一方面,本技术提供的一种基于物联网的led联动管理方法采用如下的技术方案:一种基于物联网的led联动管理方法,包括:判断地下停车场的停车位是否有车辆驶入;其中所述地下停车场包括若干停车区域;一个所述停车区域包括若干所述停车位;若有车辆驶入,开启所述停车位预设的车位led指示灯,并获取所述停车位的车辆信息,将所述车辆信息与所述停车位的车位标识进行关联保存;其中每个所述停车位均设有一个车位led指示灯;当接收到智能终端发送的车辆定位请求时,根据所述车辆定位请求得到请求车辆信息及当前位置信息;根据所述请求车辆信息检索到对应的车位标识,确定目标停车位;根据所述当前位置信息及所述目标停车位生成路径信息,将所述路径信息发送至所述智能终端;控制所述目标停车位的车位led指示灯发出提示灯光。
6.通过采用上述技术方案,由于每个停车位对应一个车位led指示灯,车位led指示灯在车辆驶入时开启,用于对停车位提供照明作用;在当前执行主体接收到智能终端的车辆定位请求时,车位led指示灯发出提示灯光,用于对目标停车位进行定位,便于用户通过车位led指示灯确定目标停车位;用户通过智能终端获取路径信息,便于对目标停车位进行定位,进一步便于用户通过路径信息寻找到目标停车位,进而便于用户寻找车辆。
7.可选的,在所述判断地下停车场的停车位是否有车辆驶入之前,包括:
基于预设的识别摄像头,得到所述车辆的车辆图像;基于预设的图像识别算法和所述车辆图像,得到所述车辆的车辆型号;基于所述车辆型号确定所述停车区域;若干停车区域基于所述车辆型号进行划分;开启区域照明led灯,并基于预设的颜色传感器,获取所述区域led照明灯的灯光颜色;其中不同的所述停车区域对应不同的所述灯光颜色;将所述灯光颜色发送至车辆终端进行广播,使所述车辆驶入所述车辆型号对应的所述停车区域。
8.通过采用上述技术方案,将停车区域按照车辆型号进行划分,进一步有利于用户寻找车辆;每个停车区域的区域照明led灯的灯光颜色不同,便于用户通过灯光颜色确定停车区域,便于用户基于区域led灯驶入正确的停车区域。
9.可选的,所述判断地下停车场的停车位是否有车辆驶入,包括:基于所述停车位内预设的阻挡牌,识别所述车辆的车牌内置的rfid电子标签,得到所述车辆的车辆信息;其中所述阻挡牌上设有rfid读写器,所述阻挡牌与所述停车位上方的顶板连接;所述车辆信息包括车辆整备质量;基于所述停车位上预设的地磅,得到车辆检测质量;若所述车辆检测质量大于所述车辆整备质量的预设的比率,判定所述地下停车场的所述停车位有车辆驶入。
10.通过采用上述技术方案,阻挡牌用于在车辆驶入时,通过预设的rfid读写器识别车辆信息,停车位上预设的地磅用于检测车辆是否驶入,若车辆检测质量大于车辆整备质量,表明此时车辆完全进入停车位,当前执行主体即判定停车位有车辆驶入。
11.可选的,所述车辆信息还包括驶入车辆型号;在所述开启所述停车位预设的车位led指示灯之前,包括:判断所述驶入车辆型号是否与所述停车区域对应的车辆型号相同;若所述驶入车辆型号与所述停车区域对应的车辆型号相同,判定所述车辆驶入正确,并执行下一步;若所述驶入车辆型号与所述停车区域对应的车辆型号不同,判定所述车辆驶入错误,并控制所述车位led指示灯发出频闪光。
12.通过采用上述技术方案,车辆在驶入地下停车场的停车区域时,可能出现驶入错误,当车辆驶入正确的停车区域的停车位时,车位led指示灯即开启;当车辆驶入错误的停车区域的停车位时,当前执行主体控制车位led指示灯发出频闪光,有利于提醒车辆驶入错误的停车区域。
13.可选的,所述阻挡牌上设有若干led灯组;所述阻挡牌与所述停车位正中间正上方的顶板通过气缸连接;在所述停车位无车辆驶入时,所述气缸的默认状态为伸长状态,使所述阻挡牌阻挡所述车辆进入;在所述判定所述车辆驶入正确之后,还包括:控制所述led灯组形成通行标识;控制所述气缸收缩,使所述阻挡牌上升,使所述阻挡牌不影响所述车辆驶入所述停车位;
在所述判定所述车辆驶入错误之后,还包括:保持所述气缸处于所述伸长状态;控制所述led灯组形成禁停标识。
14.通过采用上述技术方案,阻挡牌用于阻止驶入错误停车区域的车辆驶入停车位,同时阻挡牌上的led灯组用于提示车辆是否驶入正确的停车区域,若阻挡牌上的led灯组形成通行标识,表明车辆驶入正确的停车区域;若阻挡牌上的led灯组形成禁停标识,表明车辆驶入错误的停车区域;通过对停车区域的划分,使车辆驶入正确的停车位,便于停车场管理的同时,有利于用户根据停车区域寻找车辆。
15.可选的,在所述接收到智能终端发送的车辆定位请求之前,包括:控制预设的光调制解调器,使车辆信息加载于所述车位led指示灯的灯光信号中,使所述智能终端通过扫描所述灯光信号绑定所述车辆信息。
16.通过采用上述技术方案,光调制解调器用于将信息加载于灯光信号中,用户通过智能终端扫描灯光信号即可发出车辆定位请求,在当前执行主体接收到车辆定位请求后,当前执行主体即将路径信息发送至智能终端,路径信息通过智能终端扫描灯光信号获取,便于用户基于路径信息寻找目标停车位。
17.可选的,所述地下停车场还设置有若干led照明灯;在所述根据所述当前位置信息及所述目标停车位生成路径信息,将所述路径信息发送至所述智能终端之后,包括:当所述led照明灯为不常开,获取所有所述led照明灯的设置位置;根据路径信息及所有所述led照明灯的所述设置位置,确定所述路径信息上的目标led照明灯;控制所述目标led照明灯开启。
18.通过采用上述技术方案,当led照明灯不常开时,即地下停车场有时出现光线较暗的情况时,此时基于路径信息开启路径信息上的目标led照明灯,便于指引用户停车位的位置,进一步便于用户在地下停车场寻找车辆。
19.可选的,在所述根据所述当前位置信息及所述目标停车位生成路径信息,将所述路径信息发送至所述智能终端之后,还包括:当所述led照明灯为常开,获取所有所述led照明灯的设置位置;根据路径信息及所有所述led照明灯的所述设置位置,确定所述路径信息上的目标led照明灯;控制所述目标led照明灯的闪烁频率和/或灯光波长,所述灯光波长与其他非目标led照明灯的灯光波长不同。
20.通过采用上述技术方案,当led照明灯常开时,即地下停车场光线充足,此时控制所述目标led照明灯的闪烁频率和/或灯光波长,所述灯光波长与其他非目标led照明灯的灯光波长不同,即路径信息上的目标led照明灯与其他led照明灯的颜色不同,便于指引用户停车位的位置,进一步便于用户在地下停车场寻找车辆。
21.第二方面,本技术提供的一种基于物联网的led联动管理系统采用如下的技术方案:一种基于物联网的led联动管理系统,其特征在于:包括车位led指示灯和中央控
制主机;所述车位led指示灯与所述中央控制主机电连接;所述中央控制主机用于判断地下停车场的停车位是否有车辆驶入,并在判定所述车辆驶入后开启所述车位led指示灯并获取所述停车位的车辆信息,将所述车辆信息与所述停车位的车位标识进行关联保存;其中每个所述停车位均设有一个车位led指示灯;所述中央控制主机用于当接收到智能终端发送的车辆定位请求时,根据所述车辆定位请求得到请求车辆信息及当前位置信息;根据所述请求车辆信息检索到对应的车位标识,确定目标停车位;根据所述当前位置信息及所述目标停车位生成路径信息,将所述路径信息发送至所述智能终端;控制所述目标停车位的车位led指示灯发出提示灯光。
22.通过采用上述技术方案,车位led指示灯在车辆驶入时开启,用于对停车位提供照明作用;在中央控制主机接收到智能终端的车辆定位请求时,车位led指示灯发出提示灯光,用于对目标停车位进行定位,便于用户通过车位led指示灯确定目标停车位;用户通过智能终端获取路径信息,进一步便于用户通过路径信息寻找车辆。
23.可选的,还包括识别摄像头、区域照明led灯和颜色传感器;所述识别摄像头、所述区域照明led灯与所述颜色传感器均与所述中央控制主机电连接;所述识别摄像头用于拍摄所述车辆的车辆图像;所述中央控制主机用于基于预设的图像识别算法对所述车辆图像进行识别得到车辆型号;所述区域照明led灯用于对停车场的停车区域照明;其中一个所述区域照明led灯对应一个所述停车区域;所述颜色传感器用于感应所述区域照明灯的灯光颜色;所述中央控制主机用于基于所述车辆型号确定所述停车区域,并在确定所述停车区域后开启所述区域照明led灯,并基于所述颜色传感器获取所述区域led照明灯的灯光颜色,将所述灯光颜色通过无线传输至所述车辆的车辆终端;其中若干停车区域基于所述车辆型号进行划分;不同的所述停车区域对应不同的所述灯光颜色。
24.通过采用上述技术方案,若干停车区域基于车辆型号进行划分;不同的停车区域对应不同的灯光颜色,便于用户基于灯光颜色确定车辆的停车区域,进而便于用户在停车区域中寻找车辆。
25.综上所述,本技术具有以下至少一种有益技术效果:1.在接收到智能终端的车辆定位请求时,车位led指示灯发出提示灯光,用于对目标停车位进行定位,便于用户通过车位led指示灯确定目标停车位;用户通过智能终端获取路径信息,进一步便于用户通过路径信息寻找到目标停车位。
26.2.当led照明灯不常开时,此时基于路径信息开启路径信息上的目标led照明灯,便于指引用户停车位的位置,进一步便于用户在地下停车场寻找车辆。
27.3.当led照明灯常开时,控制所述目标led照明灯的闪烁频率和/或灯光波长,所述灯光波长与其他非目标led照明灯的灯光波长不同,即路径信息上的目标led照明灯与其他led照明灯的颜色不同,便于指引用户停车位的位置,进一步便于用户在地下停车场寻找车辆。
附图说明
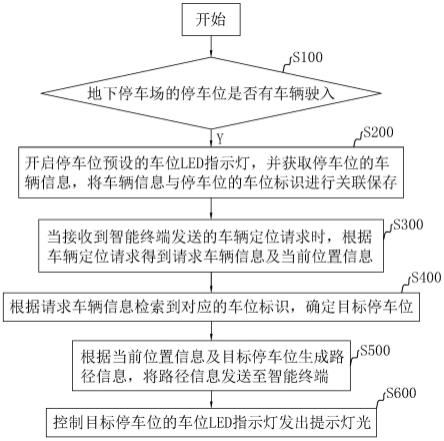
28.图1是本技术实施例一种基于物联网的led联动管理方法的整体流程图。
29.图2是本技术实施例一种基于物联网的led联动管理方法中在判断地下停车场的停车位是否有车辆驶入之前的流程图。
30.图3是本技术实施例一种基于物联网的led联动管理方法中在开启停车位预设的车位led指示灯之前的流程图。
31.图4是本技术实施例一种基于物联网的led联动管理方法中在根据当前位置信息及目标停车位生成路径信息,将路径信息发送至智能终端之后的流程图。
32.图5是本技术实施例一种基于物联网的led联动管理方法中在根据当前位置信息及目标停车位生成路径信息,将路径信息发送至智能终端之后的另一流程图。
33.图6是本技术实施例一种基于物联网的led联动管理系统的整体结构图。
34.附图标记说明:1、车位led指示灯;2、中央控制主机;3、识别摄像头;4、区域照明led灯;5、颜色传感器。
具体实施方式
35.本技术实施例公开一种基于物联网的led联动管理方法。
36.参照图1,一种基于物联网的led联动管理方法包括:s100、判断地下停车场的停车位是否有车辆驶入;其中地下停车场包括若干停车区域;一个停车区域包括若干停车位。
37.在具体实施中,地下停车场包括若干停车区域,每个停车区域包括若干停车位。在多层地下停车场中,可将每层停车场划分为一个停车区域,亦可将一层停车场划分为若干停车区域,需要注意的是,每层的停车区域需进行层数标注,以便于用户寻找停车位。
38.参照图2,在判断地下停车场的停车位是否有车辆驶入之前,包括:s1、基于预设的识别摄像头,得到车辆的车辆图像。
39.停车场内设置有若干识别摄像头,用于拍摄驶入停车场的车辆的车辆图像。具体的,识别摄像头可通过专用摄像头支架设置于停车场内的立柱或停车场内的顶板横梁上。
40.s2、基于预设的图像识别算法和车辆图像,得到车辆的车辆型号。
41.本实施例中,图像识别算法为车型识别算法,主要基于深度神经网络算法进行车型识别,车辆型号本实施例中分为suv、皮卡车、面包车和小轿车。
42.具体的通过深度神经网络算法对车辆型号进行识别的步骤如下:将车辆图像通过卷积层、完全连接层以及softmax层组成的深度神经网络进行车辆型号识别,采用的深度神经网络为vgg16模型。
43.vgg16模型总共有16层,分为13个卷积层和3个全连接层,通常应用于分类识别,由于在深度神经网络算法中,vgg16模型已被广泛使用,故在此不再赘述。
44.s3、基于车辆型号确定停车区域;若干停车区域基于车辆型号进行划分。
45.本实施例中停车区域基于车辆型号进行划分,故每个停车区域对应一个车辆型号,例如a停车区域的车辆型号为suv,则若驶入地下停车场的车辆的车辆型号为suv时,应驶入a停车区域,即基于车辆型号suv,确定停车区域为a停车区域。
46.s4、开启区域照明led灯,并基于预设的颜色传感器,获取区域led照明灯的灯光颜色;其中不同的停车区域对应不同的灯光颜色。
47.颜色传感器指通过将物体颜色同参考颜色进行比较来检测颜色的传感器,用于检测区域照明灯的灯光颜色,由于不同的停车区域对应不同的灯光颜色,故用户可通过灯光颜色确定车辆的停车区域。
48.具体实施中,在当前执行主体确定车辆型号后即开启区域照明led灯,便于指引用户将车辆驶入对应停车区域。
49.s5、将灯光颜色发送至车辆终端进行广播,使车辆驶入车辆型号对应的停车区域。
50.具体的,当前执行主体在得到灯光颜色后,则与车辆终端进行无线连接,并将灯光颜色发送至车辆终端,使车辆终端显示或广播灯光颜色,便于使用户驶入车辆型号对应的停车区域。具体的,车辆的车载收音机或车载导航通过无线接收器接收到当前执行主体发送的带有灯光颜色的提示信息的无线信号,车辆终端解析无线信号并显示或播报灯光颜色的提示信息,用于提示目标车辆的驾驶员将车辆驶入车辆型号对应的停车区域。
51.需要说明的是,在具体场景中,地下停车场除设置有车位led指示灯和区域照明led灯之外,还设有用于照明的led照明灯,本实施例中,led照明灯可为不常亮照明灯和常亮照明灯。不常亮照明灯指在固定时间段内开启的照明灯,例如若led照明灯在17:00-23:00之间开启,当车辆在9:00驶入地下停车场时,此时led照明灯不亮,即为不常亮照明灯;常亮照明灯指全天均开启的照明灯。
52.具体的,判断地下停车场的停车位是否有车辆驶入,包括:s110、基于停车位内预设的阻挡牌,识别车辆的车牌内置的rfid电子标签,得到车辆的车辆信息;其中阻挡牌上设有rfid读写器,阻挡牌与停车位上方的顶板连接;车辆信息包括车辆整备质量。
53.本实施例中,rfid电子标签为高频rfid电子标签,rfid读写器为高频rfid读写器。具体的,rfid读写器的读写范围为1m,当车辆驶入停车位时,阻挡牌上的rfid读写器距离车辆1m左右范围时即进行识别。
54.车辆信息包括车牌号、车辆整备质量和车辆型号。整备质量亦称为空车质量,指车辆的干质量加上冷却液和燃料及备用车轮和随车附件的总质量。
55.需要说明的是,相邻的两个停车位的rfid个工作频率可不同,以便于防止两个相邻停车位同时驶入车辆时的信号干扰。
56.s120、基于停车位上预设的地磅,得到车辆检测质量。
57.地磅用于测量车辆的质量。
58.s130、若车辆检测质量大于车辆整备质量的预设的比率,判定地下停车场的停车位有车辆驶入。
59.若车辆检测质量大于车辆整备质量的预设的比率,表明汽车已经驶入停车位一段距离。举例说明,若设置比率为50%,车辆整备质量为1800kg,若车辆检测质量为910kg,此时车辆检测质量大于车辆整备质量的50%,此时当前执行主体判定停车位有车辆驶入。
60.具体的,车辆信息还包括驶入车辆型号;参照图3,在开启停车位预设的车位led指示灯之前,包括:s140、判断驶入车辆型号是否与停车区域对应的车辆型号相同。
61.基于步骤s3进行说明,当前执行主体基于获取的驶入车辆型号与停车位所在的停车区域对应的车辆型号进行判断,判断车辆是否驶入正确的停车区域。
62.s150、若驶入车辆型号与停车区域对应的车辆型号相同,判定车辆驶入正确,并执行下一步。
63.若驶入车辆型号与停车区域对应的车辆型号相同,判定车辆驶入正确,并执行开启停车位预设的车位led指示灯的步骤。
64.s160、若驶入车辆型号与停车区域对应的车辆型号不同,判定车辆驶入错误,并控制车位led指示灯发出频闪光。
65.若当前执行主体判定车辆驶入错误,则控制车位led指示灯发出频闪光。本实施例中,当前执行主题通过控制车位led指示灯的高低电平控制车位led指示灯闪烁即发出频闪光。
66.参照图3,阻挡牌上设有若干led灯组;阻挡牌与停车位正中间正上方的顶板通过气缸连接;在停车位无车辆驶入时,气缸的默认状态为伸长状态,使阻挡牌阻挡车辆进入;在判定车辆驶入正确之后,还包括:s151、控制led灯组形成通行标识。
67.通行标识用于表示车辆可驶入停车位的显示标识,例如车辆在驶入正确的停车位时,led灯组中的部分led灯亮起,并形成“y”标识,则“y”标识指通行标识。
68.s152、控制气缸收缩,使阻挡牌上升,使阻挡牌不影响车辆驶入停车位。
69.本实施例中,气缸与当前执行主体通过电线电连接,若车辆驶入正确,当前执行主体即控制气缸收缩,使气缸拉动阻挡牌上升,以便于防止阻挡牌阻挡车辆驶入停车位。
70.在判定车辆驶入错误之后,还包括:s161、保持气缸处于伸长状态。
71.若当前执行主体判定车辆驶入错误的停车位,则保持气缸处于伸长状态,用于使阻挡牌阻挡车辆驶入错误的停车位。
72.s162、控制led灯组形成禁停标识。
73.禁停标识用于表示车辆不可驶入停车位的显示标识,例如车辆在驶入错误的停车位时,led灯组中的部分led灯亮起,并形成“n”标识,则“n”标识指禁停标识。
74.具体实施中,当地磅检测到车辆驶入时,阻挡牌即识别到驶入车辆型号,此时当前执行主体将驶入车辆型号与停车位所在的停车区域对应的车辆型号进行比较,并判断车辆是否驶入错误。
75.参照图1,s200、若有车辆驶入,开启停车位预设的车位led指示灯,并获取停车位的车辆信息,将车辆信息与停车位的车位标识进行关联保存;其中每个停车位均设有一个车位led指示灯。
76.在车辆驶入停车位后,当前执行主体即开启车位led指示灯。本实施例中,车辆信息指车牌号和车辆归属地等。车位标识用于对车位进行定位。具体实施中,车位标识包含车位号和车位楼层,例如“1203”的车位标识可表示车位楼层为负一楼,车位号为“203”的车位标识。
77.若地下停车场的停车位无车辆驶入,当前执行主体无动作。
78.s300、当接收到智能终端发送的车辆定位请求时,根据车辆定位请求得到请求车
辆信息及当前位置信息。
79.当用户需寻找车辆时,即通过智能终端向当前执行主体发送车辆定位请求,以便于寻找车辆。具体的,用户可通过登录预设的平台向当前执行主体发送车辆定位请求。具体实施中,用户在发送车辆定位请求时,当前执行主体即获取请求车辆信息和当前位置信息。当前位置信息指智能终端的当前位置信息,当前执行主体基于智能终端内置的gps定位模块得到智能终端的当前位置信息。
80.具体的,在接收到智能终端发送的车辆定位请求之前,包括:s310、控制预设的光调制解调器,使车辆信息加载于车位led指示灯的灯光信号中,使智能终端通过扫描灯光信号绑定车辆信息。
81.在用户在停车位停放好车辆后,用户即通过智能终端扫描灯光信号以获得车辆信息,此时智能终端与车辆信息绑定。车辆信息由步骤s110得到。
82.光调制解调器用于将车辆信息经过调制解调加载于车位led指示灯的灯光信号中。由于led灯的闪烁即灯亮和灯灭的速度人类肉眼无法感知,但可被智能终端设有的摄像头捕捉,故可通过智能终端扫描灯光信号。本实施例中,车位led指示灯发出的高频闪烁光加载有车辆信息,智能终端通过摄像头对灯光信号进行逐行扫描拍摄得到灯光信号的调制信息,并经由智能终端内预设的解码软件解码得到车辆信息。
83.具体的,摄像头首先拍摄车位led灯发射出的变化的光信号,变化的光信号在拍摄时以明暗条纹的形式显示,而后摄像头即可通过扫描明暗条纹得到车辆信息。
84.用户通过智能终端扫描灯光信号得到车辆信息后,智能终端则与车辆信息绑定参照图1,s400、根据请求车辆信息检索到对应的车位标识,确定目标停车位。
85.基于步骤s200可知,车辆信息与停车位的车位标识进行关联保存,则当前执行主体即可根据请求车辆信息检索到对应的车位标识,并可确定目标停车位的位置。具体的,目标停车位的车位标识在电子地图上对应具体的位置坐标,具体实施中,可通过位置坐标数据库将车位标识与车位坐标进行绑定,故当前执行主体可通过车位标识得到目标停车位的位置坐标,以便于后续的路径规划。
86.s500、根据当前位置信息及目标停车位生成路径信息,将路径信息发送至智能终端。
87.当前位置信息具体的表现为智能终端的位置坐标,基于智能终端的位置坐标和目标停车位的位置坐标即可生成路径信息,此时当前执行主体将路径信息发送至智能终端,便于用户寻找目标停车位。
88.s600、控制目标停车位的车位led指示灯发出提示灯光。
89.提示灯光具体表现可为控制车位led指示灯开启或控制车位led指示灯发出与其他led指示灯不一致的颜色。
90.参照图4,地下停车场还设置有若干led照明灯;若干led照明灯用于为地下停车场提供照明。
91.在根据当前位置信息及目标停车位生成路径信息,将路径信息发送至智能终端之后,包括:s501、当led照明灯为不常开,获取所有led照明灯的设置位置。
92.基于步骤s5可知,不常亮照明灯指在固定时间段内开启的照明灯,例如若led照明
灯在17:00-23:00之间开启,当车辆在9:00驶入地下停车场时,此时led照明灯不亮,即为不常亮照明灯。
93.所有led照明灯的设置位置为预设。当led照明灯为不常开,且led照明灯处于不开启状态时,此时当前执行主体获取所有led照明灯的设置位置。
94.s502、根据路径信息及所有led照明灯的设置位置,确定路径信息上的目标led照明灯。
95.路径信息指当前执行主体规划的路径,此时当前执行主体首先确定路径信息的范围,并确定落入路径信息的范围的led照明灯的设置位置,即可确定路径信息上的目标led照明灯。
96.s503、控制目标led照明灯开启。
97.当led照明灯不常开时,地下停车场的led照明灯处于不开启状态时,若此时用户寻找车辆,当前执行主体即开启路径信息上的目标led照明灯,用于通过开启状态的led照明灯指引用户寻找车辆。
98.参照图5,在根据当前位置信息及目标停车位生成路径信息,将路径信息发送至智能终端之后,还包括:s510、当led照明灯为常开,获取所有led照明灯的设置位置。
99.基于步骤s5可知,常亮照明灯指全天均开启的照明灯。所有led照明灯的设置位置为预设。
100.s520、根据路径信息及所有led照明灯的设置位置,确定路径信息上的目标led照明灯。
101.步骤s520与步骤s502一致,即此时当前执行主体首先确定路径信息的范围,并确定落入路径信息的范围的led照明灯的设置位置,即可确定路径信息上的目标led照明灯。
102.s530、控制目标led照明灯的闪烁频率和/或灯光波长,灯光波长与其他非目标led照明灯的灯光波长不同。
103.当前执行主体控制闪烁频率和/或灯光波长,用于与其他非目标led照明灯进行区分,用于指引用户停车位的路径,便于用户寻找车辆。当前执行主体通过控制灯光波长控制灯光颜色,通过控制灯光频率控制灯光闪烁。
104.需要说明的是,若当led照明灯不常开时的地下停车场,地下停车场的led照明灯处于开启状态时,若此时用户寻找车辆,当前执行主体执行步骤s520和步骤s530。
105.本技术实施例一种基于物联网的led联动管理方法的实施原理为:由于每个停车位对应一个车位led指示灯,车位led指示灯在车辆驶入时开启,用于对停车位提供照明作用;在当前执行主体接收到智能终端的车辆定位请求时,车位led指示灯发出提示灯光,用于对目标停车位进行定位,便于用户通过车位led指示灯确定目标停车位;用户通过智能终端获取路径信息,便于对目标停车位进行定位,进一步便于用户通过路径信息寻找到目标停车位,进而便于用户寻找车辆。
106.本技术实施例还公开一种基于物联网的led联动管理系统。
107.参照图6,一种基于物联网的led联动管理系统包括车位led指示灯1、中央控制主机2、识别摄像头3、区域照明led灯4和颜色传感器5;车位led指示灯1与中央控制主机2通过电线电连接;识别摄像头3、区域照明led灯4与颜色传感器5均与中央控制主机2通过电线电
连接;中央控制主机2用于判断地下停车场的停车位是否有车辆驶入,并在判定车辆驶入后开启车位led指示灯1并获取停车位的车辆信息,将车辆信息与停车位的车位标识进行关联保存;其中每个停车位均设有一个车位led指示灯1;中央控制主机2用于当接收到智能终端发送的车辆定位请求时,根据车辆定位请求得到请求车辆信息及当前位置信息;根据请求车辆信息检索到对应的车位标识,确定目标停车位;根据当前位置信息及目标停车位生成路径信息,将路径信息发送至智能终端;控制目标停车位的车位led指示灯1发出提示灯光。
108.车位led指示灯1在车辆驶入时开启,用于对停车位提供照明作用;在中央控制主机2接收到智能终端的车辆定位请求时,车位led指示灯1发出提示灯光,用于对目标停车位进行定位,便于用户通过车位led指示灯1确定目标停车位;用户通过智能终端获取路径信息,进一步便于用户通过路径信息寻找车辆。
109.识别摄像头3用于拍摄车辆的车辆图像;中央控制主机2用于基于预设的图像识别算法对车辆图像进行识别得到车辆型号;区域照明led灯4用于对停车场的停车区域照明;其中一个区域照明led灯4对应一个停车区域;颜色传感器5用于感应区域照明灯的灯光颜色;中央控制主机2用于基于车辆型号确定停车区域,并在确定停车区域后开启区域照明led灯4,并基于颜色传感器5获取区域led照明灯的灯光颜色,将灯光颜色通过无线传输至车辆的车辆终端;其中若干停车区域基于车辆型号进行划分;不同的停车区域对应不同的灯光颜色。
110.若干停车区域基于车辆型号进行划分;不同的停车区域对应不同的灯光颜色,便于用户基于灯光颜色确定车辆的停车区域,进而便于用户在停车区域中寻找车辆。
111.本技术实施例一种基于物联网的led联动管理系统的实施原理为:车位led指示灯1在车辆驶入时开启,用于对停车位提供照明作用;在中央控制主机2接收到智能终端的车辆定位请求时,车位led指示灯1发出提示灯光,用于对目标停车位进行定位,便于用户通过车位led指示灯1确定目标停车位;用户通过智能终端获取路径信息,进一步便于用户通过路径信息寻找车辆。
112.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1