一种大型无人机智能选择联络道口驶出的控制方法与流程
1.本发明涉及大型无人控制技术领域,尤其是一种大型无人机智能选择联络道口驶出的控制方法。
背景技术:
2.目前大型无人机使用的机场多为通航机场或军用机场,驶出跑道路线基本是预先规划好的,在跑道使用频率较低的机场,无人机的机动性问题不是很凸显。但随着科技的进步,无人机与民用航空接轨是未来的发展趋势。
3.在现有技术中大型无人机在进行驶出跑道作业时,通常采用的是3种方式:主流是采用全自动控制,即无人机根据预设的程序和路线进行行驶。
4.指令控制,在预定的安全范围内可以通过指令进行控制。
5.人工控制,人工对无人机遇到的问题及时作出反应来进行控制。
6.由于驶出跑道的距离通常不长,联络道宽度有限,无人机速度较快,人工控制会由于链路传输延时和人工反应迟钝等原因,风险性较高,通常采用的是第一种方式进行全自动控制来实现。
7.无人机与有人机融合飞行会面临一个问题,遇繁忙的民航机场,其跑道复杂或航管临时调配,需无人机及时机动调整驶出路线,快速脱离跑道。传统的控制方法不能很好的让无人机作出机动或需机务人员进入跑道牵引,将会导致跑道占用时间长,使用效率低,引起不必要的空中交通堵塞或安全隐患,为无人机与民用航空接轨增添了一个较高的屏障。
技术实现要素:
8.本发明目的在于:针对上述问题,提供一种大型无人机智能选择联络道口驶出的控制方法,解决了现有技术中无人机与有人机融合飞行时,大型无人机无法自主作出机动或需机务人员进入跑道牵引,导致跑道占用时间长,使用效率低,引起不必要的空中交通堵塞或安全隐患的问题。
9.本发明是通过下述方案来实现的:一种大型无人机智能选择联络道口驶出的控制方法,其具体步骤如下:步骤一,将机场的所有联络道的标定信息载入到无人机系统导航软件中;步骤二,无人机按照预先加载的驶出路线进行行驶,若没有接到航管的变道驶出指令,则无人机按照预先加载的驶出路线驶出机场;若无人机接到航管的变道驶出指令,无人机结合自身位置与变道驶出道的位置关系进行速度调节、转向驶出作业,或者无人机结合自身位置与变道驶出道的位置关系进行速度调节、掉头、转向驶出作业,最终实现智能选择联络道口驶出。
10.基于上述一种大型无人机智能选择联络道口驶出的控制方法,在步骤二中,无人机接到航管的变道驶出指令时,将无人机位置记为p,将变道驶出的联络道记为x,对联络道x中心线的延长线与跑道的交点记为目标点m,无人机距离目标点m的距离为米(正航向为
正值,反之为负值),此时无人机对航管给出的联络道x进行查找,并结合自身所在位置进行判断;无人机安全转向距离为s米;若当0<<s,无人机自动在目标点m正航向前方d米处生成1个掉头点记为t,无人机速度根据距掉头点的距离线性插值进行自适应速度调节,无人机在掉头点t掉头后无人机继续向目标点m行驶,当≤s,无人机将速度控制为最小滑行速度行驶,进行左转弯跑道脱离,总的路线为:p
→m→
t
→m→
x;若当≥s,无人机速度根据距掉头点的距离线性插值进行自适应速度调节,在转向时速度控制为最小滑行速度行驶,进行右转弯跑道脱离,总的路线为:p
→m→
x。
11.基于上述一种大型无人机智能选择联络道口驶出的控制方法,若当<0m,此时为反航向距离,无人机自动在无人机位置p点正航向前方d米处生成1个掉头点t,无人机的速度根据距掉头点的距离线性插值进行自适应速度调节,无人机掉头后无人机继续向目标点m行驶,当≤s,无人机将速度控制为最小滑行速度行驶,进行左转弯跑道脱离,总的路线为:p
→
t
→m→
x。
12.基于上述一种大型无人机智能选择联络道口驶出的控制方法,在步骤二中,无人机接到航管的变道驶出指令时,首选判断是否无人机侧偏<5m,偏航角<3
°
,若是则进行下一步作业;若否,则无人机停止运行等待牵引车进入跑道牵引。
13.基于上述一种大型无人机智能选择联络道口驶出的控制方法,无人机的速度指令在12km/h~50km/h的范围内进行选择。
14.基于上述一种大型无人机智能选择联络道口驶出的控制方法,掉头点t距离目标点m至少为120米;无人机转向时速度控制为5km/h最小滑行速度进行行驶;无人机安全转向距离为50米。
15.综上所述,由于采用了上述技术方案,本发明的有益效果是:1、通过本控制方法,弥补了大型无人机与有人机融合飞行时突然要求变道时的控制流程缺陷,使大型无人机能够根据本控制方法应需求自动生成相应的掉头点,实现大型无人机就近掉头,快速且安全的脱离机场跑道,降低了跑道占用时长,降低机场空中交通堵塞。
附图说明
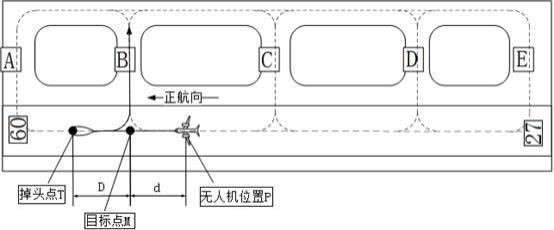
16.图1和图2是本发明实施例2的路线示意图;图3是本发明实施例3的路线示意图。
具体实施方式
17.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
18.本说明书(包括任何附加权利要求、摘要)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列
等效或类似特征中的一个例子而已。
19.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
20.此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或隐含地包括一个或多个该特征。
21.在现有的大型无人机控制方法是将已经规划好的双向自主驶出路线,成功加载至无人机后,执行预先设定好的唯一联络道脱离跑道的路线。如遇联络道繁多,或民航航管临时调配时,不能智能选择使用某条联络道快速脱离跑道的路线;或需重新进行任务规划,确认新的驶出路线,再成功加载至无人机,才能执行相应的驶出动作。若当前无人机位置不满足脱离相应联络道的驶出条件,还需机务使用牵引车进入跑道牵引,最终导致跑道占用时间长,使用效率低,从而引起不必要的空中交通堵塞或安全隐患。
22.实施例1本实施例提供一种大型无人机智能选择联络道口驶出的控制方法,本控制方法应用于机场跑道宽度≥40m的机场;其具体步骤如下:步骤一,将机场的所有联络道的标定信息载入到无人机系统导航软件中;步骤二,无人机按照预先加载的驶出路线进行行驶,若没有接到航管的变道驶出指令,则无人机按照预先加载的驶出路线驶出机场;若无人机接到航管的变道驶出指令,将无人机位置记为p,将变道驶出的联络道记为x,对联络道x中心线的延长线与跑道的交点记为目标点m,无人机距离目标点m的距离为米(正航向为正值,反之为负值),此时无人机对航管给出的联络道x进行查找,并结合自身所在位置进行判断;首先判断是否无人机侧偏<5m,偏航角<3
°
,若是则进行下一步作业;若否,则无人机停止运行等待牵引车进入跑道牵引;步骤三:当判断无人机侧偏<5m,偏航角<3
°
时进行如下控制;若当0<<50,无人机自动在目标点m正航向前方d米处生成1个掉头点记为t,掉头点t距离目标点m为d,其至少为120m,此时无人机选择在掉头点t进行自动掉头,无人机的速度指令在12km/h~50km/h的范围内,根据距掉头点的距离线性插值进行自适应速度调节,即当距离m点越远,无人机的速度越大,随着距离值减小,无人机的速度逐步减小;无人机掉头后无人机继续向目标点m行驶,当≤50m,无人机将速度控制为最小滑行速度5km/h行驶,进行左转弯跑道脱离,总的路线为:p
→m→
t
→m→
x(联络道);若当≥50m,此时无人机控制速度在12km/h~50km/h的范围内进行行驶,根据距掉头点的距离线性插值进行自适应速度调节,即当距离m点越远,无人机的速度越大,随着距离值减小,无人机的速度逐步减小,在转向时速度控制为最小滑行速度5km/h行驶,进行右转弯跑道脱离,总的路线为:p
→m→
x(联络道);若当<0,此时为反航向距离,无人机自动在无人机位置p点正航向前方d米
处生成1个掉头点t,掉头点t距离无人机位置p为d,其至少为120m,此时无人机选择在掉头点t进行自动掉头,无人机的速度指令在12km/h~50km/h的范围内,根据距掉头点的距离线性插值进行自适应速度调节,即当距离m点越远,无人机的速度越大,随着距离值减小,无人机的速度逐步减小;无人机掉头后无人机继续向目标点m行驶,当≤50m,无人机将速度控制为最小滑行速度5km/h行驶,进行左转弯跑道脱离,总的路线为:p
→
t
→m→
x。
23.通过本控制方法,弥补了大型无人机与有人机融合飞行时突然要求变道时的控制流程缺陷,使大型无人机能够根据本控制方法根据需求自动生成相应的掉头点,实现大型无人机就近掉头,快速且安全的脱离机场跑道,降低了跑道占用时长,降低机场空中交通堵塞。
24.实施例2如图1和图2所示,本实施例以具体的示例进行说明;此时,无人机已刹停在跑道上,预先设定加载的驶出路线为27联络道a;此时无人机位置p位于联络道b与c之间,且无人机侧偏<5m,偏航角<3
°
;突接航管要求从联络道b快速脱离跑道,飞行员发出“27联络道b”驶出指令,设无人机距联络道转弯目标点m距离为,此时为正航向距离(航向27),为正值。
25.当0<<50,自动在目标点m正航向前方d米处生成1个掉头点t(turn around point),d为120米(此时无人机选择在掉头点t进行自动掉头),速度指令在12km/h~50km/h的范围内,根据距掉头点的距离线性插值进行自适应速度调节;当无人机掉头后,≤50,最小滑行速度为5km/h,进行左转弯跑道脱离,总的路线为:p
→m→
t
→m→
b(联络道)。
26.当≥50m,无人机速度指令在12km/h~50km/h的范围内,根据距目标点m的距离线性插值,最小滑行速度为5km/h,右转弯跑道脱离,总的路线为:p
→m→
b(联络道)。
27.实施例3如图3所示,本实施例以具体的示例进行说明:此时,无人机已刹停在跑道上,预先设定加载的驶出路线为27联络道a;此时无人机位置p位于联络道b与c之间,且无人机侧偏<5m,偏航角<3
°
;突接航管要求从联络道c(或d、e等)快速脱离跑道,飞行员发出“09联络道c”(或d、e)驶出指令,设无人机距联络道转弯目标点m距离为,此时为反航向距离(航向09),为负值。
28.此时<0,自动在无人机位置p点正航向前方d米处生成1个掉头点t(turn around point),d为120m(此时无人机选择在掉头点t进行自动掉头),速度指令在12km/h~50km/h的范围内,根据距掉头点的距离线性插值进行自适应速度调节;当无人机掉头后,≤50,最小滑行速度为5km/h,进行左转弯跑道脱离,总的路线为:p
→
t
→m→
c(或d、e)联络道。
29.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精
神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1