基于计算机视觉分析的桥船桥防撞智能监测预警管理系统的制作方法
1.本发明涉及船桥防撞技术领域,具体为基于计算机视觉分析的桥船桥防撞智能监测预警管理系统。
背景技术:
2.随着交通运输事业的发展,河面上的船舶越来越多,船舶的运输安全与桥梁的设施安全问题越来越重要,由于自然环境、船舶状况及船舶操作者等因素,导致船舶与桥梁发生碰撞的事故每年都有发生,若能够准确发现危险船舶,并进行及时危险预警,对防止船舶与桥梁发生碰撞事故的降低,显得尤为重要;
3.但现有的在桥船防撞智能监测预警管理的方式中,难以动态分析船舶以及桥梁通航情况,也难以对船舶通航异常情况及时做出应对预警,故无法保证航道通航安全畅通,极大影响了船舶和桥梁等过河建筑物自身的安全;
4.为了解决上述缺陷,现提供一种技术方案。
技术实现要素:
5.本发明的目的就在于为了解决现有的在桥船防撞智能监测预警管理的方式中,难以动态分析船舶以及桥梁通航情况,也难以对船舶通航异常情况及时做出应对预警,故无法保证航道通航安全畅通,极大影响了船舶和桥梁等过河建筑物自身的安全的问题,利用数据分析的方式,实现了对船舶以及桥梁的通航高度的危险判定分析,并采用梯度参照阈值的设定以及对应的各体积注水指令的指定,从而实现了对船舶通航高度的碰撞风险的预警以及及时控制,为保证船舶安全通航奠定了基础,并采用公式化的分析、区域的梯度细化以及偏航状态判定分析的方式,准确分析了船舶在水运航道的横向层面与桥梁发生碰撞的风险判定,并利用等级预警分析以及偏航指令通知提醒的方式,进而实现了对船舶通航异常情况的及时预警与应对,在提高了船舶与桥梁的通航安全的同时,也保障了航道通航安全畅通,而提出基于计算机视觉分析的桥船桥防撞智能监测预警管理系统。
6.本发明的目的可以通过以下技术方案实现:
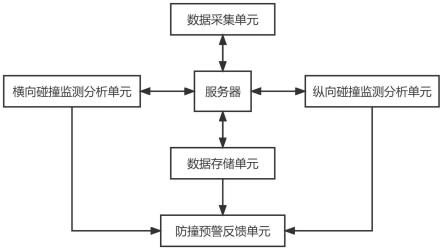
7.基于计算机视觉分析的桥船桥防撞智能监测预警管理系统,包括服务器,服务器通信连接有数据采集单元、数据存储单元、纵向碰撞监测分析单元、横向碰撞监测分析单元和防撞预警反馈单元;
8.所述数据采集单元用于采集水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息,并将其均发送至数据存储单元进行暂存;
9.所述纵向碰撞监测分析单元用于从数据存储单元中调取水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息,并进行纵向船桥防撞分析处理,据此生成通航高度超高判定信号,并将其发送至防撞预警反馈单元;
10.所述横向碰撞监测分析单元用于从数据存储单元中调取水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息,并进行横向船桥防撞分析处理,据此生成轻微
偏航预警信号和高度偏航预警信号,并将其发送至防撞预警反馈单元;
11.所述防撞预警反馈单元用于接收通航高度超高判定信号,并进行高度防撞预警控制分析处理,据此执行向船舶压水舱内压载各数量体积水量的操作;
12.所述防撞预警反馈单元还用于接收轻微偏航预警信号和高度偏航预警信号,并进行侧部防撞预警控制分析处理,据此执行向船舶发送偏航通知提醒的操作。
13.进一步的,纵向船桥防撞分析处理的具体操作步骤如下:
14.获取水运巷道的水位基准值与实时水位高度值,并将其分别标定为bsg和rtgi,i=1,2,3
……
n,并将其进行作差分析,依据公式wczi=rtgi-bsg,得到水运巷道的实时的水位差值;
15.捕捉连续的n1个时间点的水位差值,并将其进行加和分析,依据公式bdz=wcz1+wcz2+
……
+wcz
n1
,据此得到水位波动值,其中,n1∈i,且n1为小于等于n的正整数;
16.分析水位波动值的数据大小情况,将水位波动值与预设的波动参照值h1、h2进行比较分析,当水位波动值<0,则生成巷道水位下降信号,当0<水位波动值<h1时,则生成水位轻微上涨信号,当水位波动值>h1时,则生成水位大幅度上涨信号;
17.依据生成的水位大幅度上涨信号,实时获取水运巷道的水位波动值、桥梁高度值,并将桥梁高度值标定为brg,并将实时的水位波动值与桥梁高度值进行作差分析,依据公式bhg=brg-bdz,得到波动通航净高值;
18.实时监测水运巷道各船舶的船舶通航高度,并将其标定为ctgj,将各船舶的船舶通航高度与桥梁的波动通航净高值进行比较分析,当船舶通航高度大于等于波动通航净高值时,ctgj≥bhg时,则生成通航高度超高判定信号。
19.进一步的,高度防撞预警控制分析处理的具体操作步骤如下:
20.依据通航高度超高判定信号,将各船舶的船舶通航高度与桥梁的波动通航净高值进行作差分析,依据公式pcj=bhg-ctgj,求得各船舶的通航高度差量值;
21.设置通航高度差量值的梯度参照阈值sp1、sp2,并将通航高度差量值与预设的梯度参照阈值sp1、sp2进行比较分析;
22.当通航高度差量值小于等于预设的梯度参照阈值sp1时,则生成v1体积注水指令,依据v1体积注水指令向船舶压水舱内压载v1体积的水量;
23.当通航高度差量值处于预设的梯度参照阈值sp1与sp2之间时,则生成v2体积注水指令,依据v2体积注水指令向船舶压水舱内压载v2体积的水量;
24.当通航高度差量值大于等于预设的梯度参照阈值sp2时,则生成v3体积注水指令,依据v3体积注水指令向船舶压水舱内压载v3体积的水量,其中,v1<v2<v3。
25.进一步的,横向船桥防撞分析处理的具体操作步骤如下:
26.实时获取各船舶在水运航道中的航行位置点,当船舶的航行位置点处于预监测航道区域q1内时,实时获取各船舶的航行状态信息中的航行速度、迎风阻力量值和水阻力量值,并将其分别标定为cvj、fvj和svj,并将其进行公式化分析,依据公式得到各船舶的航行状态系数,其中,e1、e2和e3分别为航行速度、迎风阻力量值和水阻力量值的权重因子系数,且e1、e2和e3均为大于0的自然数;
27.设置航行状态系数的航行状态参照范围值fa1,并将航行状态系数与预设的航行
状态参照范围值fa1进行比较分析;
28.当航行状态系数小于预设的航行状态参照范围值fa1的最小值时,则生成轻度敏感监测信号,当航行状态系数处于预设的航行状态参照范围值fa1之内时,则生成中度敏感监测信号,当航行状态系数大于预设的航行状态参照范围值fa1的最大值时,则生成高度敏感监测信号;
29.依据轻度敏感监测信号、中度敏感监测信号、高度敏感监测信号进行船舶防撞反应监测力度设置分析处理,据此将警示监测航道区域q2梯度划分为k个、k+1个、k+2个监测子区域;
30.依据划分的各监测子区域,实时获取各监测子区域的船舶的航行位置点以及桥梁碰撞位置点,并进行偏航判定分析处理,据此生成轻微偏航预警信号和高度偏航预警信号。
31.进一步的,水阻力量值求解如下:
32.实时获取各船舶的船体浸没面积值、航行速度,并将其分别标定为sqj和cvj,并将其进行归一化分析,依据公式mclj=f1*sqj+f2*cvj,得到各船舶的摩擦阻力量值,其中,f1和f2分别为船体浸没面积值、航行速度的权重因子系数,且f1和f2均为大于0的自然数;
33.实时获取各船舶的船体长宽比和航行速度,并将其分别标定为lbj和cvj,并将其进行归一化分析,依据公式得到各船舶的兴波阻力量值,其中,f3和f4分别为船体长宽比和航行速度的权重因子系数,且f3和f4均为大于0的自然数;
34.实时获取各船舶的涡流阻力量值,并将其标定为wlj,将各船舶的摩擦阻力量值、兴波阻力量值以及涡流阻力量值进行加和分析,依据公式svj=mclj+xblj+wlj,得到各船舶的水阻力量值。
35.进一步的,船舶防撞反应监测力度设置分析处理的具体操作步骤如下:
36.依据生成的轻度敏感监测信号、中度敏感监测信号、高度敏感监测信号,并将警示监测航道区域q2梯度划分为k个、k+1个、k+2个监测子区域,其中,k为正整数。
37.进一步的,偏航判定分析处理的具体操作步骤如下:
38.实时获取各监测子区域的船舶的航行位置点以及桥梁碰撞位置点,将船舶的航行位置点与桥梁碰撞位置点进行作差分析,得到相对距离;
39.设置相对距离的安全距离范围fw,当相对距离处于安全距离范围fw之内时,则生成正常通航信号,反之,当相对距离处于安全距离范围fw之外时,则生成异常通航信号;
40.分别统计各监测子区域的被标定为正常通航信号与异常通航信号的数量和,并将其分别标记为sum1和sum2,当sum1≤sum2时,则生成横向碰撞危险等级高信号,反之,当当sum1>sum2时,则生成横向碰撞危险等级一般信号;
41.按照各监测子区域的梯度划分顺序,分析对应的监测子区域的横向碰撞危险等级类型判定信号,当邻近桥梁位置的连续的两个监测子区域均判定为横向碰撞危险等级一般信号时,则生成轻微偏航预警信号,而其他情况下,则均生成高度偏航预警信号。
42.进一步的,侧部防撞预警控制分析处理的具体操作步骤如下:
43.依据生成的轻微偏航预警信号,触发一级撞桥预警指令,依据一级撞桥预警指令向船舶发送偏航通知提醒;
44.依据生成的高度偏航预警信号,触发二级撞桥预警指令,依据二级撞桥预警指令
向船舶发送偏航通知提醒,并同时通过海事向船舶执行高频对话发送偏航通知提醒。
45.与现有技术相比,本发明的有益效果是:
46.本发明,利用数据作差分析以及数据加和分析和数据参照比较分析的方式,实现了对船舶以及桥梁的通航高度的危险判定分析,并以此为基础,通过梯度参照阈值的设定以及对应的各体积注水指令的指定,从而实现了对船舶通航高度的碰撞风险的预警以及及时控制,为保证船舶安全通航提供了依据;
47.利用公式化的分析、区域的梯度细化以及偏航状态判定分析的方式,准确分析了船舶在水运航道的横向层面与桥梁发生碰撞的风险判定,并采用等级预警分析以及偏航指令通知提醒的方式,进而实现了对船舶通航异常情况的及时预警与应对,在提高了船舶与桥梁的通航安全的同时,也保障了航道通航安全畅通。
附图说明
48.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明;
49.图1为本发明的系统总框图。
具体实施方式
50.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
51.如图1所示,基于计算机视觉分析的桥船桥防撞智能监测预警管理系统,包括服务器,服务器通信连接有数据采集单元、数据存储单元、纵向碰撞监测分析单元、横向碰撞监测分析单元和防撞预警反馈单元;
52.数据采集单元用于采集水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息,并将其均发送至数据存储单元进行暂存;
53.当纵向碰撞监测分析单元接收到水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息时,并据此进行纵向船桥防撞分析处理,具体的操作过程如下:
54.获取水运巷道的水位基准值与实时水位高度值,并将其分别标定为bsg和rtgi,其中,i表示各时间点,且i=1,2,3
……
n,并将其进行作差分析,依据公式wczi=rtgi-bsg,得到水运巷道的实时的水位差值;
55.捕捉连续的n1个时间点的水位差值,并将其进行加和分析,依据公式bdz=wcz1+wcz2+
……
+wcz
n1
,据此得到水位波动值,其中,n1∈i,且n1为小于等于n的正整数;
56.分析水位波动值的数据大小情况,将水位波动值与预设的波动参照值h1、h2进行比较分析,当水位波动值<0,则生成巷道水位下降信号,当0<水位波动值<h1时,则生成水位轻微上涨信号,当水位波动值>h1时,则生成水位大幅度上涨信号,其中,h1小于h2,且h1和h2的具体数值的设置由本领域技术人员根据具体水运航道以及船桥案例进行具体设置;
57.依据生成的水位大幅度上涨信号,实时获取水运巷道的水位波动值、桥梁高度值,并将桥梁高度值标定为brg,并将实时的水位波动值与桥梁高度值进行作差分析,依据公式
bhg=brg-bdz,得到波动通航净高值,需要说明的是,桥梁高度值指的是桥梁底部与水位基准面之间产生的高度值;
58.实时监测水运巷道各船舶的船舶通航高度,并将其标定为ctgj,其中,j指的是各船舶的数量,将各船舶的船舶通航高度与桥梁的波动通航净高值进行比较分析,当船舶通航高度大于等于波动通航净高值时,即ctgj≥bhg时,则生成通航高度超高判定信号;
59.并将生成的通航高度超高判定信号发送至防撞预警反馈单元;
60.当防撞预警反馈单元接收到通航高度超高判定信号时,并进行高度防撞预警控制分析处理,具体的操作过程如下:
61.依据通航高度超高判定信号,将各船舶的船舶通航高度与桥梁的波动通航净高值进行作差分析,依据公式pcj=bhg-ctgj,求得各船舶的通航高度差量值;
62.设置通航高度差量值的梯度参照阈值sp1、sp2,并将通航高度差量值与预设的梯度参照阈值sp1、sp2进行比较分析,其中,梯度参照阈值sp1、sp2呈梯度增加;
63.当通航高度差量值小于等于预设的梯度参照阈值sp1时,则生成v1体积注水指令,依据v1体积注水指令向船舶压水舱内压载v1体积的水量;
64.当通航高度差量值处于预设的梯度参照阈值sp1与sp2之间时,则生成v2体积注水指令,依据v2体积注水指令向船舶压水舱内压载v2体积的水量;
65.当通航高度差量值大于等于预设的梯度参照阈值sp2时,则生成v3体积注水指令,依据v3体积注水指令向船舶压水舱内压载v3体积的水量,其中,v1<v2<v3;
66.当横向碰撞监测分析单元接收到水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息时,并据此进行横向船桥防撞分析处理,具体的操作过程如下:
67.实时获取各船舶在水运航道中的航行位置点,当船舶的航行位置点处于预监测航道区域q1内时,实时获取各船舶的航行状态信息中的航行速度、迎风阻力量值和水阻力量值,并将其分别标定为cvj、fvj和svj,并将其进行公式化分析,依据公式得到各船舶的航行状态系数,其中,e1、e2和e3分别为航行速度、迎风阻力量值和水阻力量值的权重因子系数,且e1、e2和e3均为大于0的自然数,权重因子系数用于均衡各项数据在公式计算中的占比权重,从而促进计算结果的准确性;
68.其中,水阻力量值求解如下:获取各船舶的船体浸没面积值、航行速度,并将其分别标定为sqj和cvj,并将其进行归一化分析,依据公式mclj=f1*sqj+f2*cvj,得到各船舶的摩擦阻力量值,其中,f1和f2分别为船体浸没面积值、航行速度的权重因子系数,且f1和f2均为大于0的自然数;
69.获取各船舶的船体长宽比和航行速度,并将其分别标定为lbj和cvj,并将其进行归一化分析,依据公式得到各船舶的兴波阻力量值,其中,f3和f4分别为船体长宽比和航行速度的权重因子系数,且f3和f4均为大于0的自然数;
70.获取各船舶的涡流阻力量值,并将其标定为wlj,将各船舶的摩擦阻力量值、兴波阻力量值以及涡流阻力量值进行加和分析,依据公式svj=mclj+xblj+wlj,得到各船舶的水阻力量值;
71.设置航行状态系数的航行状态参照范围值fa1,并将航行状态系数与预设的航行状态参照范围值fa1进行比较分析;
72.当航行状态系数小于预设的航行状态参照范围值fa1的最小值时,则生成轻度敏感监测信号,当航行状态系数处于预设的航行状态参照范围值fa1之内时,则生成中度敏感监测信号,当航行状态系数大于预设的航行状态参照范围值fa1的最大值时,则生成高度敏感监测信号;
73.船舶防撞反应监测力度设置分析处理的具体操作步骤如下:
74.依据生成的轻度敏感监测信号、中度敏感监测信号、高度敏感监测信号,并将警示监测航道区域q2梯度划分为k个、k+1个、k+2个监测子区域,其中,k为正整数,且k的具体数值的设定与警示监测巷道区域q2的大小有关,且k的具体数值由本领域技术人员在具体船桥防撞案例中具体设置;
75.需要指出的是,当分析到船舶的敏感监测信号为轻度敏感监测信号时,则将警示监测航道区域q2梯度划分为k个监测子区域,且各监测子区域的大小呈梯度减少的,即靠近桥梁一侧的监测子区域的范围小于远离桥梁一侧的监测子区域的范围,且当分析到船舶的敏感监测信号为中度敏感监测信号时,则将警示监测航道区域q2梯度划分为k+1个监测子区域,当分析到船舶的敏感监测信号为、高度敏感监测信号时,则将警示监测航道区域q2梯度划分为k+2个监测子区域;
76.依据划分的各监测子区域,实时获取各监测子区域的船舶的航行位置点以及桥梁碰撞位置点,并进行偏航判定分析处理,具体的:
77.实时获取各监测子区域的船舶的航行位置点以及桥梁碰撞位置点,将船舶的航行位置点与桥梁碰撞位置点进行作差分析,得到相对距离;
78.设置相对距离的安全距离范围fw,当相对距离处于安全距离范围fw之内时,则生成正常通航信号,反之,当相对距离处于安全距离范围fw之外时,则生成异常通航信号;
79.分别统计各监测子区域的被标定为正常通航信号与异常通航信号的数量和,并将其分别标记为sum1和sum2,当sum1≤sum2时,则生成横向碰撞危险等级高信号,反之,当当sum1>sum2时,则生成横向碰撞危险等级一般信号;
80.按照各监测子区域的梯度划分顺序,分析对应的监测子区域的横向碰撞危险等级类型判定信号,当邻近桥梁位置的连续的两个监测子区域均判定为横向碰撞危险等级一般信号时,则生成轻微偏航预警信号,而其他情况下,则均生成高度偏航预警信号;
81.并将生成的轻微偏航预警信号和高度偏航预警信号发送至防撞预警反馈单元;
82.当防撞预警反馈单元接收到轻微偏航预警信号和高度偏航预警信号时,并据此进行侧部防撞预警控制分析处理,具体的操作过程如下:
83.依据生成的轻微偏航预警信号,触发一级撞桥预警指令,依据一级撞桥预警指令向船舶发送偏航通知提醒;
84.依据生成的高度偏航预警信号,触发二级撞桥预警指令,依据二级撞桥预警指令向船舶发送偏航通知提醒,并同时通过海事向船舶执行高频对话发送偏航通知提醒。
85.本发明在使用时,通过获取水运巷道上的各船舶的航行状态信息以及各桥梁的通航状态信息,并进行纵向船桥防撞分析处理,利用数据作差分析以及数据加和分析和数据参照比较分析的方式,实现了对船舶以及桥梁的通航高度的危险判定分析,并以此为基础,
通过梯度参照阈值的设定以及对应的各体积注水指令的指定,从而实现了对船舶通航高度的碰撞风险的预警以及及时控制,为保证船舶安全通航提供了依据;
86.通过获取各船舶在水运航道中的航行位置点以及船舶与桥梁相对运行轨迹信息,并进行横向船桥防撞分析处理,利用公式化的分析、区域的梯度细化以及偏航状态判定分析的方式,准确分析了船舶在水运航道的横向层面与桥梁发生碰撞的风险判定,并采用等级预警分析以及偏航指令通知提醒的方式,进而实现了对船舶通航异常情况的及时预警与应对,在提高了船舶与桥梁的通航安全的同时,也保障了航道通航安全畅通。
87.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1