一种低空多无人机概率型冲突探测方法及存储介质
1.本发明涉及一种低空多无人机概率型冲突探测方法及存储介质,属于冲突探测领域。
背景技术:
2.随着无人机市场的不断扩大以及城市空中交通运行概念的兴起,无人机运行常态化和无人机数量在不断增加,无人机的碰撞风险问题也日益突出。因此现在急需一种在城市复杂场景下,对多无人机进行快速冲突探测的方法。
技术实现要素:
3.本发明提供了一种低空多无人机概率型冲突探测方法及存储介质,解决了背景技术中披露的问题。
4.为了解决上述技术问题,本发明所采用的技术方案是:
5.一种低空多无人机概率型冲突探测方法,包括:
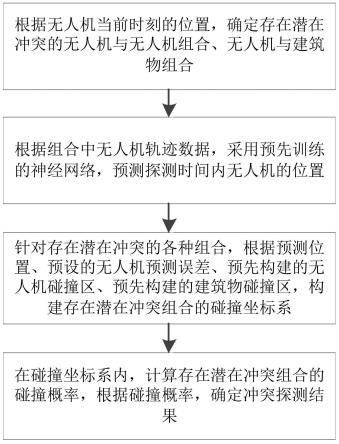
6.根据无人机当前时刻的位置,确定存在潜在冲突的无人机与无人机组合、无人机与建筑物组合;
7.根据组合中无人机轨迹数据,采用预先训练的神经网络,预测探测时间内无人机的位置;
8.针对存在潜在冲突的各种组合,根据预测位置、预设的无人机预测误差、预先构建的无人机碰撞区、预先构建的建筑物碰撞区,构建存在潜在冲突组合的碰撞坐标系;
9.在碰撞坐标系内,计算存在潜在冲突组合的碰撞概率,根据碰撞概率,确定冲突探测结果。
10.根据无人机当前时刻的位置,确定存在潜在冲突的无人机与无人机组合、无人机与建筑物组合,包括:
11.根据无人机当前时刻的位置,确定无人机与无人机之间的距离、无人机与建筑物之间的距离;
12.若距离小于距离阈值,则相应的组合为存在潜在冲突的组合。
13.无人机碰撞区和建筑物碰撞区均基于最小包络圆构建,碰撞区为圆柱形;
14.建筑物碰撞区公式为:
[0015][0016]
s.t.||x
k-x0||≤r
obs
[0017]hobs
=h
i-hj[0018]
其中,r
obs
为建筑物碰撞区的半径,x0为建筑物最小包络圆的中心点,xk∈c
obs
为c
obs
中的第k个点,c
obs
为建筑物水平边界的凸包,ho
bs
为建筑物碰撞区的高度,hi为建筑物最高点,hj为建筑物最低点;
[0019]
无人机碰撞区公式为:
[0020][0021]
s.t.||x
′k′-x
′0||≤r
cir
[0022]ruav
=σr·rcir
[0023]huav
=σh(h
ui-h
uj
)
[0024]
其中,r
cir
为无人机最小包络圆的半径,x
′0为无人机最小包络圆的中心点,x
′k′
∈c
uav
为c
uav
中的第k
′
个点,c
uav
为无人机水平边界的凸包,σr为半价扩展参数,r
uav
为无人机碰撞区的半径,h
uav
为无人机碰撞区的高度,h
ui
为无人机最高点,h
uj
为无人机最低点,σh为高度扩展参数。
[0025]
针对存在潜在冲突的各种组合,根据预测位置、预设的无人机预测误差、预先构建的无人机碰撞区、预先构建的建筑物碰撞区,构建存在潜在冲突组合的碰撞坐标系,包括:
[0026]
若存在潜在冲突的组合为无人机与无人机组合,将一架无人机作为参考无人机,另一架作为随机无人机,将参考无人机的预测误差叠加到随机无人机的预测误差上,将随机无人机的碰撞区叠加到参考无人机的碰撞区上,以参考无人机为原点,随机无人机为质点,构建碰撞坐标系;
[0027]
若存在潜在冲突的组合为无人机与建筑物组合,将无人机的碰撞区叠加到建筑物的碰撞区上,无人机的预测误差不做调整,以建筑物为原点,无人机为质点,构建碰撞坐标系。
[0028]
在碰撞坐标系内,计算存在潜在冲突组合的碰撞概率,包括:
[0029]
在碰撞坐标系内,计算质点和原点的相对位置,
[0030]
根据相对位置和预测误差,计算质点位置的概率分布;
[0031]
根据质点位置的概率分布和碰撞区域,计算存在潜在冲突组合的碰撞概率。
[0032]
质点位置的概率分布是以相对位置为数学期望向量,以组合误差为协方差矩阵的三维正态分布;其中,若存在潜在冲突的组合为无人机与无人机组合,组合误差为两架无人机预测误差叠加构成的误差;若存在潜在冲突的组合为无人机与建筑物组合,组合误差为无人机预测误差;
[0033]
碰撞概率是以融合碰撞区域为积分区域,以质点位置的概率分布为积分函数的三重积分;其中,融合碰撞区域为质点碰撞区叠加到原点碰撞区构成的区域。
[0034]
若存在潜在冲突的组合为无人机与无人机组合,质点位置的概率分布为:
[0035][0036]
其中,p
uu
为无人机与无人机组合时,质点位置的概率分布,r为坐标转化矩阵,θ为无人机在预测时刻的航向角,为无人机在预测时刻的爬升角,为随机无人机的预测误差,为参考无人机的预测误差,为随机无人机的预测位置,为参考无人机的预测位置;
[0037]
若存在潜在冲突的组合为无人机与建筑物组合,质点位置的概率分布为:
[0038][0039]
其中,p
uo
为无人机与建筑物组合时,质点位置的概率分布,为建筑物的实际位置。
[0040]
若存在潜在冲突的组合为无人机与无人机组合,融合碰撞区域为:
[0041][0042]
其中,d
uu
为无人机与无人机组合的融合碰撞区域,r
ruav
为参考无人机碰撞区的半径,r
suav
为随机无人机碰撞区的半径,h
ruav
为参考无人机碰撞区的高度,h
suav
为随机无人机碰撞区的高度;(x,y,z)为三维变量,为三维实数域;
[0043]
若存在潜在冲突的组合为无人机与建筑物组合,融合碰撞区域为:
[0044][0045]
其中,d
uo
为无人机与建筑物组合融合碰撞区域,rr′
uav
为无人机碰撞区的半径,r
obs
为建筑物碰撞区的半径,hr′
uav
为无人机碰撞区的高度,h
obs
为建筑物碰撞区的高度。
[0046]
若存在潜在冲突的组合为无人机与无人机组合,碰撞概率为:
[0047][0048]
其中,p
uu
为无人机与无人机组合时的碰撞概率,d为融合碰撞区域,n3表示三重积分,参数为随机无人机的预测位置,为参考无人机的预测位置,参数∑σ
uu
=r
rarrrt
+r
sasrst
,ar为参考无人机的预测误差矩阵,t表示转置,as为随机无人机的预测误差矩阵,预测误差矩阵表示为diag(σ1,σ2,σ3),diag表示对角矩阵,σ1、σ2、σ3分别为无人机预测误差在机体坐标系三个方向的值,rr为参考无人机的坐标转化矩阵,rs为随机无人机的坐标转化矩阵,坐标转化矩阵用以将无人机的预测误差由机体坐标系转化为全局坐标系;
[0049]
若存在潜在冲突的组合为无人机与建筑物组合,碰撞概率为:
[0050][0051]
其中,p
uo
为无人机与建筑物组合时的碰撞概率,参数为建筑物的位置,为无人机的预测位置,参数∑σ
uo
=r
′
sa′
sr′
st
,a
′s为无人机的预测误差矩阵,r
′s为无人机的坐标转化矩阵。
[0052]
一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行低空多无人机概率型冲突探测方法。
[0053]
本发明所达到的有益效果:本发明采用神经网络精确预测无人机航迹,并考虑预测不可避免的误差构建碰撞坐标系,在碰撞坐标系内计算碰撞概率,从而实现低空多无人机复杂环境下的冲突探测,为制定及时的冲突解脱策略奠定基础。
附图说明
[0054]
图1为本发明方法的流程图;
[0055]
图2为建筑物碰撞区示意图;
[0056]
图3为无人机碰撞区示意图;
[0057]
图4为bi-lstm轨迹预测模型结构图;
[0058]
图5为碰撞坐标系示意图。
具体实施方式
[0059]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0060]
如图1所示,一种低空多无人机概率型冲突探测方法,包括以下步骤:
[0061]
步骤1,根据无人机当前时刻的位置,确定存在潜在冲突的无人机与无人机组合、无人机与建筑物组合;
[0062]
步骤2,根据组合中无人机轨迹数据,采用预先训练的神经网络,预测探测时间内无人机的位置;
[0063]
步骤3,针对存在潜在冲突的各种组合,根据预测位置、预设的无人机预测误差、预先构建的无人机碰撞区、预先构建的建筑物碰撞区,构建存在潜在冲突组合的碰撞坐标系;
[0064]
步骤4,在碰撞坐标系内,计算存在潜在冲突组合的碰撞概率,根据碰撞概率,确定冲突探测结果。
[0065]
上述方法采用神经网络精确预测无人机航迹,并考虑预测不可避免的误差构建碰撞坐标系,在碰撞坐标系内计算碰撞概率,从而实现低空多无人机复杂环境下的冲突探测,为制定及时的冲突解脱策略奠定基础。
[0066]
在实施上述方法之前,需要预先训练用于预测无人机轨迹的神经网络、以及构建空域内的无人机碰撞区和建筑物碰撞区。
[0067]
无人机碰撞区和建筑物碰撞区均基于最小包络圆构建,碰撞区为圆柱形,构建碰撞区遵循以下原则:低空建筑物以高层建筑为主,考虑其外形特点,以圆柱形区域构建建筑物的碰撞区;为便于后序碰撞坐标系的转换,无人机的碰撞区应与建筑物一致;考虑到爬升、下降等非水平机动,无人机碰撞区应在其原有尺寸的基础上做相应的扩展。
[0068]
图2为建筑物碰撞区,低空城市障碍物以高层建筑物为主,考虑其外形特点,以圆柱形区域构建建筑物的碰撞区。结合最小包络圆概念,建筑物碰撞区半径可表示为:
[0069][0070]
s.t.||x
k-x0||≤r
obs
[0071]
其中,r
obs
为建筑物碰撞区的半径(即建筑物最小包络圆的半径),x0为建筑物最小包络圆的中心点,xk∈c
obs
为c
obs
中的第k个点,c
obs
为建筑物水平边界的凸包;
[0072]
建筑物碰撞区高度可以表示为:
[0073]hobs
=h
i-hj[0074]
其中,h
obs
为建筑物碰撞区的高度,hi为建筑物最高点,hj为建筑物最低点。
[0075]
图3为无人机碰撞区,为便于后序碰撞坐标系的转换,无人机的碰撞区应与建筑物一致,因此选择圆柱形碰撞区。考虑到无人机运动过程中的爬升、下降等非水平机动,碰撞区应在无人机原有尺寸的基础上做相应的扩展。结合最小包络圆概念,无人机碰撞区半径可表示为:
[0076][0077]
s.t.||x
′k′-x
′0||≤r
cir
[0078]ruav
=σr·rcir
[0079]
其中,r
cir
为无人机最小包络圆的半径,x
′0为无人机最小包络圆的中心点,x
′k′
∈c
uav
为c
uav
中的第k
′
个点,c
uav
为无人机水平边界的凸包,σr为半价扩展参数,σr大于等于1,r
uav
为无人机碰撞区的半径;
[0080]
无人机碰撞区高度可以表示为:
[0081]huav
=σh(h
ui-h
uj
)
[0082]
其中,h
uav
为无人机碰撞区的高度,h
ui
为无人机最高点,h
uj
为无人机最低点,σh为高度扩展参数,σh大于等于1。
[0083]
如图4所示,本发明的神经网络采用的是bi-lstm神经网络,在训练前需获取无人机轨迹数据,包括轨迹点的经纬度、高度、时刻、航向、速度等信息;对无人机轨迹进行平滑插值处理,使相邻轨迹信息之间具有相同的时间间隔,获得更为真实的轨迹样本,轨迹平滑算式如下:
[0084][0085]
其中,bn(t)为平滑后航迹数据点,t为平滑参数,为原始轨迹数据点,k≤n,三阶bezier曲线取n=3。
[0086]
将平滑插值后的轨迹数据集拆分成训练集和测试集,利用训练集训练神经网络中的参数:bi-lstm神经网络以空域无人机历史轨迹时序数据集为输入,以空间位置坐标预测值为输出,具体如下:
[0087]
在bi-lstm神经网络中建立遗忘门和输入门,利用遗忘门控制选择的数据集被遗忘的程度,利用输入门控制预测的时间跨度,通过梯度下降的方法向后传播梯度值,并在lstm的基础上结合了输入序列在前向和后向两个方向上的信息,具体可表现为由一个从时间序列起点到终点移动的lstm(正向)和从时间序列终点到起点移动的lstm(负向)组成,并最终将该隐藏层链接至同一输出层。经过多次迭代之后,得到较优的权值参数,从而得到较优的bi-lstm神经网络。
[0088]
如图4所示,是上述bi-lstm神经网络结构图,用公式可表示为:
[0089]
[0090][0091][0092][0093][0094]yt
=σ(h
t
,h
t
)
[0095]
其中,w
xi
,w
xf
,w
xo
,w
xc
是与输入矩阵x
t
相关联的门的权重矩阵,t表示转置,w
hi
,w
hf
,w
ho
,w
hc
是与短期记忆h
t-1
相关的权重矩阵,bi,bf,bo,bc为每个门对应的偏差,sigmoid为激活函数,表达式为f(x)=(1+e-x
)-1
,tanh为激活函数,表达式为g(x)=(e
2x-1)/(e
2x
+1),f
t
为lstm的遗忘门,i
t
为lstm的输入门,o
t
为lstm的输出门,c
t
、c
′
t
是用于存储输入样本特征的门,表示两个矩阵之间的点积,h
t
是正向层和反向层的两个输出序列,σ表示可以表示平均值、求和、连接等用于合并两个输出序列的任何方法,y
t
表示神经网络模型一层中的最终输出。
[0096]
设置bi-lstm神经网络模块层数为2层,激活函数选择sigmoid,参数训练选择adam优化算法,学习率设置在0.001-0.01,迭代训练次数为100次,样本批量大小为50。使用scikit-learn提供的网格搜索法确定预测模型的最优超参数并保存训练模型。
[0097]
在实施上述方法时,可根据无人机当前时刻的位置,确定无人机与无人机之间的距离、无人机与建筑物之间的距离(即两者几何中心之间的距离),若距离小于距离阈值,则相应的组合为存在潜在冲突的组合;通过此方法,可以筛选出存在潜在冲突的无人机与无人机组合、无人机与建筑物组合,从而避免了无意义的冲突探测,提高方法的实时性。
[0098]
根据组合中无人机轨迹数据,采用训练的bi-lstm神经网络,预测探测时间内无人机的位置,即未来时刻的无人机空间位置。
[0099]
预先以高斯分布估计无人机的预测误差,一般依据无人机的尺寸估计预测误差,设预测误差在机体坐标轴三个方向是独立的,分别为σ1、σ2、σ3;构建无人机在全局坐标系中的位置分布模型,假设无人机在全局坐标系中的预测位置为在机体坐标系中的预测误差为坐标转化矩阵为r,则得到全局坐标系中无人机位置的概率分布:
[0100][0101][0102]
其中,θ为无人机在预测时刻的航向角,为无人机在预测时刻的爬升角,矩阵a=diag(σ1,σ2,σ3),diag表示生成对角矩阵;
[0103]
因此可得,
[0104]
基于上述原理,针对存在潜在冲突的各种组合,可根据预测位置、预设的无人机预测误差、预先构建的无人机碰撞区、预先构建的建筑物碰撞区,构建存在潜在冲突组合的碰
撞坐标系。
[0105]
若存在潜在冲突的组合为无人机与无人机组合,将一架无人机作为参考无人机,另一架作为随机无人机,将参考无人机的预测误差叠加到随机无人机的预测误差上,将随机无人机的碰撞区叠加到参考无人机的碰撞区上,以参考无人机为原点,随机无人机为质点,构建碰撞坐标系,见图5。
[0106]
若存在潜在冲突的组合为无人机与建筑物组合,将无人机的碰撞区叠加到建筑物的碰撞区上,无人机的预测误差不做调整,以建筑物为原点,无人机为质点,构建碰撞坐标系。
[0107]
在碰撞坐标系内,可计算出上述质点和原点的相对位置,根据相对位置,计算质点位置的概率分布,根据质点位置的概率分布,计算存在潜在冲突组合的碰撞概率。
[0108]
质点位置的概率分布是以相对位置为数学期望向量,以组合误差为协方差矩阵的三维正态分布;其中,若存在潜在冲突的组合为无人机与无人机组合,组合误差为两架无人机预测误差叠加构成的误差;若存在潜在冲突的组合为无人机与建筑物组合,组合误差为无人机预测误差。碰撞概率是以融合碰撞区域为积分区域,以质点位置的概率分布为积分函数的三重积分;其中,融合碰撞区域为质点碰撞区叠加到原点碰撞区构成的区域。
[0109]
在无人机与无人机组合时,质点位置的概率分布可表示为:
[0110][0111]
如果令
[0112]
那么
[0113]
进一步可得:
[0114]
其中,p
uu
为无人机与无人机组合时质点位置的概率分布,r为坐标转化矩阵,为随机无人机的预测误差,为参考无人机的预测误差,为随机无人机的预测位置,为参考无人机的预测位置,ps为随机无人机位置的概率分布,pr为参考无人机位置的概率分布,as为随机无人机的预测误差矩阵,ar为参考无人机的预测误差矩阵。
[0115]
融合碰撞区域可表示为:
[0116][0117]
其中,d
uu
为无人机与无人机组合融合碰撞区域,r
ruav
为参考无人机碰撞区的半径,r
suav
为随机无人机碰撞区的半径,h
ruav
为参考无人机碰撞区的高度,h
suav
为随机无人机碰撞区的高度,(x,y,z)为三维变量;
[0118]
碰撞概率可表示为:
[0119][0120]
其中,p
uu
为无人机与无人机组合时的碰撞概率,,d为融合碰撞区域,n3表示三重积
分,参数为随机无人机的预测位置,为参考无人机的预测位置,参数∑σ
uu
=r
rarrrt
+r
sasrst
,ar为参考无人机的预测误差矩阵,t表示转置,as为随机无人机的预测误差矩阵,预测误差矩阵表示为diag(σ1,σ2,σ3),diag表示对角矩阵,σ1、σ2、σ3分别为无人机预测误差在机体坐标系三个方向的值,rr为参考无人机的坐标转化矩阵,rs为随机无人机的坐标转化矩阵,坐标转化矩阵用以将无人机的预测误差由机体坐标系转化为全局坐标系,这样才能进行后续冲突概率的计算。坐标转化矩阵是根据无人机的滚转轴、俯仰轴、偏航轴、滚转角、偏航角、俯仰角之间的关系推导出来的,前人已经推导过,所以直接用结论,不必赘述推导过程了;
[0121]
在无人机与建筑物组合时,质点位置的概率分布可表示为:
[0122][0123]
同理,令
[0124]
进一步可得:
[0125]
其中,p
uo
为无人机与建筑物组合时,质点位置的概率分布,为建筑物的实际位置;
[0126]
融合碰撞区域可表示为:
[0127][0128]
其中,d
uo
为无人机与建筑物组合融合碰撞区域,r
′
ruav
为无人机碰撞区的半径,r
obs
为建筑物碰撞区的半径,h
′
ruav
为无人机碰撞区的高度,h
obs
为建筑物碰撞区的高度;
[0129]
碰撞概率可表示为:
[0130][0131]
其中,puo为无人机与建筑物组合时的碰撞概率,参数为建筑物的位置,为无人机的预测位置,参数∑σ
uo
=r
′
sa′
sr′
st
,a
′s为无人机的预测误差矩阵,r
′s为无人机的坐标转化矩阵。
[0132]
为了提高探测的实时性,需要快速计算碰撞概率中的三重积分,这里将三维空间内的碰撞概率拆分为水平面和竖直方向上概率的计算,即为碰撞区域内二元高斯分布和一元高斯分布的积分。
[0133]
以无人机组合为例:
[0134]
可拆分为:
[0135]
水平方向上
[0136]
垂直方向上
[0137]
其中,p
uu
为无人机与无人机的碰撞概率,p
l_uu
为水平方向上的碰撞概率,p
v_uu
为竖直方向上的碰撞概率,为随机无人机水平方向的预测位置,为参考无人机水平方向的预测位置,∑σ
l_uu
为水平方向的预测误差,d
l
为水平方向的积分区域,为随机无人机垂直方向的预测位置,为参考无人机垂直方向的预测位置,σ
zu
为垂直方向的预测误差,dv为垂直方向的积分区域。
[0138]
为计算二维空间中的碰撞概率,采用了一种基于压缩无穷级数的快速计算方法来解决概率积分问题,经推导后上式改写为:
[0139][0140][0141][0142]
其中,μ
xu
为x轴方向的相对位置,μ
yu
为y轴方向的相对位置,μ
zu
为z轴方向的相对位置,σ
xu
为x轴方向的误差,σ
yu
为y轴方向的误差,σ
zu
为z轴方向的误差,r
ruav
为参考无人机碰撞区域半径,r
ruav
为随机无人机碰撞区域半径。
[0143]
可以看出,通过推导,将三维空间内的复杂积分转化为水平方向和竖直方向上的多项式形式,可加快计算速度,提高冲突探测效率。
[0144]
计算出碰撞概率后,当碰撞概率超出定义的冲突阈值时,则认为检测到冲突。
[0145]
上述方法基于精确的航迹预测和科学的误差分析,可实现低空多无人机复杂环境下的实时冲突探测,为制定及时的冲突解脱策略奠定基础。
[0146]
基于相同的技术方案,本发明还公开了上述方法的软件系统,一种低空多无人机概率型冲突探测系统,包括:
[0147]
筛选模块,根据无人机当前时刻的位置,确定存在潜在冲突的无人机与无人机组合、无人机与建筑物组合。
[0148]
预测模块,根据组合中无人机轨迹数据,采用预先训练的神经网络,预测探测时间内无人机的位置。
[0149]
碰撞坐标系构建模块,针对存在潜在冲突的各种组合,根据预测位置、预设的无人机预测误差、预先构建的无人机碰撞区、预先构建的建筑物碰撞区,构建存在潜在冲突组合的碰撞坐标系。
[0150]
冲突探测模块,在碰撞坐标系内,计算存在潜在冲突组合的碰撞概率,根据碰撞概
率,确定冲突探测结果。
[0151]
上述系统中,各模块的数据处理流程与方法对应步骤的一致,这里不重复描述了。
[0152]
基于相同的技术方案,本发明还公开了一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行低空多无人机概率型冲突探测方法。
[0153]
基于相同的技术方案,本发明还公开了一种计算设备,包括一个或多个处理器、一个或多个存储器以及一个或多个程序,其中一个或多个程序存储在所述一个或多个存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行低空多无人机概率型冲突探测方法的指令。
[0154]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0155]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0156]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0157]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0158]
以上仅为本发明的实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在申请待批的本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1