一种北斗对时控制的LED智慧雾灯的制作方法
一种北斗对时控制的led智慧雾灯
技术领域
1.本实用新型涉及led灯技术领域,特别是一种北斗对时控制的led智慧雾灯。
背景技术:
2.公路行车安全诱导系统利用设置在公路两侧的公路行车安全诱导装置(以下简称智慧雾灯)为在途车辆提供安全引导,在控制系统的集中智能控制下,智慧雾灯会根据不同的能见度与车流情况,采用不同的发光亮度、颜色、闪频等组合来实施针对性的引导策略,为驾驶员提供道路轮廓强化、行车主动诱导、防止追尾警示、安全信息提示等管控与服务功能,从而实现具有交通环境自适应特点的低能见度大雾路段在途车辆的安全引导,有效降低和避免低能见度雾条件下车辆冲出路外和前后追尾事故的发生,特别是避免高速公路连环追尾重特大恶性事故的发生。
3.但是,现在使用的雾灯,大多为固定结构,不便于安装和拆卸,且不方便对装置进行高度或者方向进行调整。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺点,提供一种北斗对时控制的led智慧雾灯,有效解决了现有技术的不足。
5.本实用新型的目的通过以下技术方案来实现:一种北斗对时控制的led智慧雾灯,包括设备箱,所述设备箱底面的两侧均设置有可往复运动的夹座,两个所述夹座之间夹持有支撑杆,所述支撑杆的外部滑动连接有组装筒,所述支撑杆通过螺帽进行位置固定,所述组装筒外部的下方转动连接有安装座,所述组装筒通过螺帽进行位置固定,所述设备箱的前面和顶面分别设置有灯板和太阳能板,所述设备箱的内部设置有集中控制器。
6.可选的,所述设备箱底面的两侧均固定连接有固定板,两个所述固定板的内部螺纹连接有顶杆,两个所述顶杆均贯穿固定板,两个所述顶杆外部的内侧均转动连接有所述夹座。
7.可选的,两个所述夹座的形状均为弧形,两个所述夹座的截面形状均为l形。
8.可选的,所述支撑杆外表面一侧的下方固定连接有第一固定杆,所述组装筒外表面的一侧开设有滑动槽,所述第一固定杆贯穿所述滑动槽,且在其内自由滑动,所述第一固定杆的外部螺纹连接有所述螺帽。
9.可选的,所述安装座顶面的中部固定连接有固定座,所述固定座的内部转动连接有所述组装筒,所述组装筒外部的下方固定连接有第二固定杆,所述第二固定杆外部的两端均贯穿所述固定座,所述第二固定杆外部的两端均螺纹连接有所述螺帽。
10.可选的,所述设备箱底面的两侧均开设有线孔,所述设备箱的背面设置有封门。
11.可选的,所述安装座顶面的四周均开设有弧槽口。
12.本实用新型具有以下优点:
13.1、该北斗对时控制的led智慧雾灯,整个装置主要由设备箱、支撑杆、组装筒以及
安装座,在设备箱底面的两侧均固定连接有固定板,在两个固定板的内部螺纹连接有顶杆,两个顶杆外部的内侧均转动连接有夹座,夹座的形状为弧形,且截面形状为l形,在两个夹座之间夹持的是支撑杆,使用时,可转动夹座对设备箱的方向,满足使用的需要。
14.2、该北斗对时控制的led智慧雾灯,在安装座顶面的中部固定连接有固定座,组装筒在固定座的内部自由转动,且由螺帽进行位置固定,支撑杆在组装筒的内部的自由滑动,也由螺帽对支撑杆的位置进行固定,同时,在安装座顶面的四周均开设有弧槽口,使用时,转动安装座,并将其固定安装在指定位置,方便使用,且可对设备箱的位置高度进行调整。
附图说明
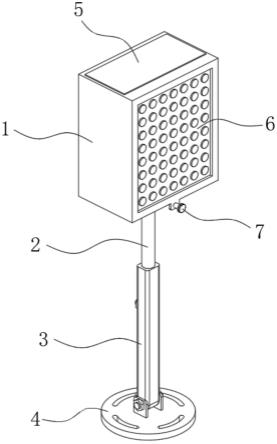
15.图1为本实用新型的第一视角结构示意图;
16.图2为本实用新型的第二视角结构示意图;
17.图3为本实用新型中图1的内部结构示意图;
18.图4为本实用新型中设备箱的结构示意图;
19.图5为本实用新型中支撑杆的结构示意图;
20.图6为本实用新型中组装筒的结构示意图;
21.图7为本实用新型中安装座的结构示意图;
22.图8为本实用新型中夹座的结构示意图;
23.图9为本实用新型的流程示意图。
24.图中:1-设备箱,2-支撑杆,3-组装筒,4-安装座,5-太阳能板,6-灯板,7-顶杆,8-夹座,9-封门,10-集中控制器,11-滑动槽,12-第二固定杆,13-第一固定杆,14-弧槽口,15-固定座,16-线孔,17-固定板。
具体实施方式
25.下面结合附图对本实用新型做进一步的描述,但本实用新型的保护范围不局限于以下所述。
26.如图1至图9所示,一种北斗对时控制的led智慧雾灯,它包括设备箱1,设备箱1底面的两侧均设置有可往复运动的夹座8,两个夹座8之间夹持有支撑杆2,支撑杆2的外部滑动连接有组装筒3,支撑杆2通过螺帽进行位置固定,组装筒3外部的下方转动连接有安装座4,组装筒3通过螺帽进行位置固定,设备箱1的前面和顶面分别设置有灯板6和太阳能板5,设备箱1的内部设置有集中控制器10,其中,灯板6、集中控制器10和太阳能板5之间依据控制关系进行电性连接。
27.整个集中控制器10由远程控制电脑、雾灯集中控制器、能见度检测仪等组成。其主要的控制流程如附图9,且工作过程如下:
28.1、控制软件安装在远程控制电脑,通过高速公路的光纤内网与集中控制器连接,集中控制器通过2.4g模块与雾灯连接。
29.2、手机app小程序安装在手机,手机通过4g模块与集中控制器连接,集中控制器通过2.4g模块与雾灯连接。
30.3、智慧雾灯采用北斗授时同步的方式进行闪烁同步。
31.设备箱1底面的两侧均固定连接有固定板17,两个固定板17的内部螺纹连接有顶
杆7,两个顶杆7均贯穿固定板17,两个顶杆7外部的内侧均转动连接有夹座8。
32.两个夹座8的形状均为弧形,两个夹座8的截面形状均为l形,作为本实用新型的一种可选技术方案,可移动的弧形夹座8,能够对不同尺寸的支撑杆2进行夹紧固定。
33.支撑杆2外表面一侧的下方固定连接有第一固定杆13,组装筒3外表面的一侧开设有滑动槽11,第一固定杆13贯穿滑动槽11,且在其内自由滑动,第一固定杆13的外部螺纹连接有螺帽。
34.安装座4顶面的中部固定连接有固定座15,固定座15的内部转动连接有组装筒3,组装筒3外部的下方固定连接有第二固定杆12,第二固定杆12外部的两端均贯穿固定座15,第二固定杆12外部的两端均螺纹连接有螺帽,作为本实用新型的一种可选技术方案,转动安装座4,并将其固定安装在指定位置,方便使用,且可对设备箱1的位置高度进行调整。
35.设备箱1底面的两侧均开设有线孔16,设备箱1的背面设置有封门9,作为本实用新型的一种可选技术方案,线孔16的设置,方便对设备箱1内部电子设备的线缆进行排布。
36.安装座4顶面的四周均开设有弧槽口14,作为本实用新型的一种可选技术方案,便于使用人员使用螺栓贯穿弧槽口14对安装座4进行固定安装。
37.本实用新型的工作过程如下:使用者使用时,整个装置主要由设备箱1、支撑杆2、组装筒3以及安装座4,在设备箱1底面的两侧均固定连接有固定板17,在两个固定板17的内部螺纹连接有顶杆7,两个顶杆7外部的内侧均转动连接有夹座8,夹座8的形状为弧形,且截面形状为l形,在两个夹座8之间夹持的是支撑杆2,使用时,可转动夹座8对设备箱1的方向,满足使用的需要,在安装座4顶面的中部固定连接有固定座15,组装筒3在固定座15的内部自由转动,且由螺帽进行位置固定,支撑杆2在组装筒3的内部的自由滑动,也由螺帽对支撑杆2的位置进行固定,同时,在安装座4顶面的四周均开设有弧槽口14,使用时,转动安装座4,并将其固定安装在指定位置,方便使用,且可对设备箱1的位置高度进行调整。
38.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1