一种基于LoRa的无人车紧急制动遥控系统
一种基于lora的无人车紧急制动遥控系统
技术领域
1.本实用新型涉及无人车控制技术领域,尤其涉及一种基于lora的无人车紧急制动遥控系统。
背景技术:
2.近年来,无人驾驶技术快速发展,多个公司都正在着手进行无人驾驶汽车的研发。其中,包括中国大学生无人驾驶方程式大赛在内的多个无人驾驶比赛都正在如火如荼地进行当中。目前的无人驾驶技术不够成熟,会出现突发状况导致脱离电脑控制的情况,造成了意外,目前尚缺少相关的技术方案解决该问题。
技术实现要素:
3.为了解决上述技术问题,本实用新型的目的是提出一种负载设备及电池检测系统。
4.本实用新型所采用的技术方案是:
5.一种基于lora的无人车紧急制动遥控系统,包括:
6.手持遥控急停端,包括第一主控模块、第一lora无线数据传输模块、急停开关、功能按键以及指示灯,所述第一主控模块分别与第一lora无线数据传输模块、急停开关、功能按键和指示灯连接;
7.车载信号接收端,安装在无人车上,包括第二主控模块、第二lora无线数据传输模块、继电器以及can通信模块,所述第二主控模块分别与第二lora无线数据传输模块、继电器和can通信模块连接;
8.所述无人车上设有安全回路,所述继电器与所述安全回路连接,所述can通信模块与无人机上的第三主控模块连接。
9.进一步地,所述第一主控模块和所述第二主控模块均采用stm32单片机来实现。
10.进一步地,所述手持遥控急停端还包括供电模块,所述供电模块包括5v稳压电路和3.3v稳压电路;
11.所述5v稳压电路用于将电池电压降至5v电压,以为所述第一lora无线数据传输模块供电;
12.所述3.3v稳压电路用于将5v稳压电路输出电压降至3.3v电压,以为第一主控模块供电。
13.进一步地,所述5v稳压电路采用型号为lm2596的降压芯片来实现,所述3.3v稳压电路采用型号为ams1117的降压芯片来实现。
14.进一步地,所述无人车紧急制动遥控系统具有跳频功能,所述功能按键包括上调按键和下调按键;
15.所述上调按键的一端连接stm32单片机的pb7引脚,另一端接地;
16.所述下调按键的一端连接stm32单片机的pb6引脚,另一端接地。
17.进一步地,所述急停开关的一端连接stm32单片机的pc13引脚,另一端接地。
18.进一步地,所述指示灯包括急停指示灯、电量预警灯和启动指示灯;
19.所述急停指示灯的一端与5v电压连接,所述急停指示灯的另一端与第一mos管的漏极,所述第一mos管的基极连接stm32单片机的pa6引脚,所述第一mos管的源极接地;
20.所述电量预警灯的一端与5v电压连接,所述电量预警灯的另一端与第二mos管的漏极,所述第二mos管的基极连接stm32单片机的pa7引脚,所述第二mos管的源极接地;
21.所述启动指示灯的一端与5v电压连接,所述启动指示灯的另一端与第三mos管的漏极,所述第三mos管的基极连接stm32单片机的pb0引脚,所述第三mos管的源极接地。
22.进一步地,所述指示灯包括工作提升灯和常联提示灯;
23.所述工作提示灯的一端连接stm32单片机的pb4引脚,另一端通过第一分压电阻接地;
24.所述常联提示灯的一端连接stm32单片机的pb3引脚,另一端通过第一分压电阻接地。
25.进一步地,所述手持遥控急停端还包括数码管,所述数码管与所述第一主控模块连接,所述数码管用于显示通信信道。
26.本实用新型的有益效果是:本实用新型提供一种基于lora的遥控急停系统(res),在无人车脱离控制时(如脱离电脑控制),执行急停操作,避免造成意外。另外,lora的传输距离远、信号稳定,确保紧急制动的效果。
附图说明
27.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
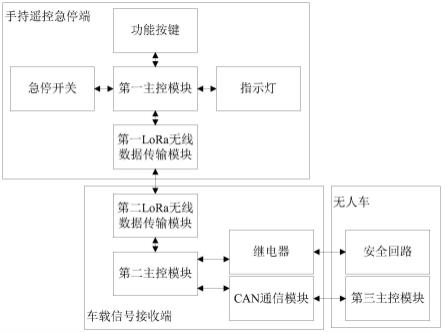
28.图1是本实用新型实施例中一种基于lora的无人车紧急制动遥控系统的结构框图;
29.图2是本实用新型实施例中无人赛车遥控系统的结构框图;
30.图3是本实用新型实施例中无线遥控器的供电网络的结构框图;
31.图4是本实用新型实施例中5v稳压电路的电子电路图;
32.图5是本实用新型实施例中3.3v稳压电路的电子电路图;
33.图6是本实用新型实施例中无线遥控器上的按键、指示灯的电路示意图;
34.图7是本实用新型实施例中一种无人赛车遥控系统的控制流程图。
具体实施方式
35.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
36.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方
位构造和操作,因此不能理解为对本实用新型的限制。
37.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
38.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
39.如图1所示,本实施例提供一种基于lora的无人车紧急制动遥控系统,包括手持遥控急停端与车载信号接收端两个部分;
40.手持遥控急停端由第一stm32主控系统(即第一主控模块)、第一lora无线数据传输模块、急停开关、功能按钮与车辆状态指示灯五大模块构成。其中,第一lora无线数据传输模块用于接收来自第二lora无线数据传输模块的射频信号,生成车辆状态数据包,并将数据包传输到第一stm32主控模块中进行数据处理。
41.车载信号接收端由第二lora无线数据传输模块、第二stm32主控模块(即第二主控模块)、can通信模块、安全回路组成。第二stm32主控模块分别与第二lora无线数据传输模块、can通信模块、安全回路相连。
42.当无人车发生紧急情况时,安全员可按下急停开关,将急停信号传输到第一stm32主控模块,第一stm32主控模块接收到电信号后,发送急停信号到第一lora无线数据传输模块,由第一lora模块进行对所述急停信号进行射频调制生成射频信号,从而实现急停信号的无线转发。
43.第一stm32主控模块用于处理第一lora无线数据传输模块接收到的车辆状态信息,并将接收到的车辆状态信息通过接收端面板上的车辆状态指示灯进行实时显示。当紧急制动开关触发时,第一stm32主控模块通过外部中断实时接收到紧急制动信息,并将发送急停信号到第一lora无线数据传输模块进行无线转发,以实现无线紧急制动。
44.车辆状态指示灯,用于实时显示车辆待驶信息、接收端与手持端的连接状态以及车辆急停状态信息。
45.第二lora无线数据传输模块用于将第二stm32主控模块传输来的车辆状态信息数据包进行射频调制,生成对应的射频信号,进行无线转发。同时,第二lora无线数据传输模块接收由所述第一lora无线数据传输模块发送的射频信号,对射频信号进行滤波与解调,生成急停信号,将急停信号发送到第二stm32主控模块。第一lora无线数据传输模块和第二lora无线数据传输模块之间通过lora无线传输技术进行通信。
46.所述第二stm32主控模块用于控制第二lora无线数据传输模块与手持遥控急停端建立通信连接线路并且接收由第二lora无线数据传输模块传来的急停数据,向安全回路发送制动急停信号;并且定时向第二lora无线数据传输模块发送车辆状态信息;与此同时,所述第二stm32主控模块通控制can通信模块,对整车高压can线路信息进行转发。
47.所述can通信模块用于接收第二stm32主控模块发送的转发信号,对驱动系统can回路报文进行转发。
48.接收第二stm32主控模块发送的急停信号,断开车辆的安全回路,无人车的高压部
分断开电源,整车处于低压状态。
49.在一些可选的实施例中,状态指示灯包括“go”按键指示灯、急停按键“stop”指示灯、通讯指示灯、电源指示灯以及电量警告灯。
50.在一些可选的实施例中,无人车紧急制动遥控系统具备通信质量不佳时进行自动跳频的功能。手持遥控急停端和车载信号接收端在感应到通信质量不佳时,通过切换不同频率的信道进行通信,保护通信处于最佳的状态。其中可通过手动的方式进行信道切换,也可通过自动跳频的方式进行切换。
51.在一些可选的实施例中,车载信号接收端具备断电触发以及信号保护功能。车载信号接收端在检测到手持遥控急停端和车载信号接收端之间的通信中断时,启动断电功能,实现急停。具体地,车载信号接收在连续5秒内没有接收到来自手持遥控急停端发送的信号后,判定为通信中断。
52.在一些可选的实施例中,手持遥控急停端具备电量预警功能。
53.以下结合具体实施例对上述系统进行详细解释说明。
54.如图2所示,本实施例提供一种无人赛车遥控系统,无线遥控器(即手持遥控急停端)和无线接收器(即车载信号接收端)。
55.在本实施例中,参见图3,无线遥控器的供电网络包括:5v稳压电路和3.3v稳压电路。参照图4,其中5v稳压电路由lm2596降压芯片及周围电路构成,用于将电池电压降至5v以供给第一lora无线数据传输模块与指示灯。参照图5,3.3v稳压电路由ams1117降压芯片及周围电路构成,将5v稳压电路输出电压降至3.3v以供给数码管、电源指示灯、功能提示灯和无线遥控器mcu(即第一主控模块)。
56.作为可选的实施方式,无线遥控器通过分压电阻间接读取电池电压,以作为判断电池电量是否低于预设值的依据。分压电阻包括第一电阻和第二电阻,两电阻阻值之比为3:1,分压比也为3:1。无线遥控器mcu引脚pa1读取分压后电压,并进行判断其值是否低于预设值。电源开关,所述电源开关一端与电池正极相连,一端与用电器相连,用于控制电源供应。按键控制电路,所述按键控制电路与无线遥控器mcu引脚相连,以向mcu输入按键状态电信号。
57.参见图6,作为可选的实施方式,无线遥控器上的按键包括启动按键sw1、上调频按键sw2、下调频按键sw3、复位按键sw4以及急停按键sw5。
58.所述启动按键的一端与参考地相连,另一端与无线遥控器pb6引脚直接相连。所述上调频按键sw2的一端与参考地相连,另一端与无线遥控器pb7引脚直接相连。所述下调频按键sw3的一端与参考地相连,另一端与无线遥控器pb8引脚直接相连。所述复位按键sw4的一端与参考地相连,另一端与无线遥控器pb9引脚直接相连。所述急停按键sw5的一端与参考地相连,另一端与无线遥控器pc13引脚直接相连。
59.参见图6,无线遥控器上的指示灯包括启动指示灯、电量预警灯、急停指示灯;指示灯控制电路通过mos管放大电路间接与无线遥控器mcu引脚相连,无线遥控器mcu可通过改变引脚电平以使指示灯常亮或熄灭。
60.具体地,所述启动指示灯的一端与5v供电网络相连,另一端电阻r6相连。mos管q3的d引脚与r6另一端相连,s引脚与参考地相连,g引脚与mcu的pb0引脚相连。其中q3的g引脚还与电阻r20相连,电阻r20另一端与参考地相连。
61.所述电量预警灯的一端与5v供电网络相连,另一端电阻r11相连。mos管q2的d引脚与r11另一端相连,s引脚与参考地相连,g引脚与mcu的pa7引脚相连。其中q3的g引脚还与电阻r17相连,电阻r17另一端与参考地相连。
62.所述急停指示灯的一端与5v供电网络相连,另一端电阻r10相连。mos管q1的d引脚与r10另一端相连,s引脚与参考地相连,g引脚与mcu的pa6引脚相连。其中q3的g引脚还与电阻r15相连,电阻r15另一端与参考地相连。
63.参见图6,作为可选的实施方式,还包括提示灯控制电路,所述指示灯控制电路的提示灯引脚接与无线遥控器mcu引脚相连,无线遥控器mcu可通过快速改变引脚电平以使提示灯闪烁。提示灯控制电路包括工作提示灯和常联提示灯。
64.具体地,所述工作提示灯一端与无线遥控器mcu的pb4引脚相连,另一端通过串联一个分压电阻r24与参考地相连。
65.所述常联提示灯一端与无线遥控器mcu的pb3引脚相连,另一端通过串联一个分压电阻r25与参考地相连。
66.作为可选的实施方式,无线遥控器还包括数码管控制电路,所述数码管控制电路中的数码管的位选与片选引脚均串联适当阻值的电阻后与无线遥控器mcu引脚直接相连。mcu可以有规律的改变引脚电平以使数码管显示通信信道和地址信息。
67.作为可选的实施方式,无线遥控器和无线接收器之间的工作方式具体如下:
68.在无线遥控器主要功能按键中,急停按钮与电源开关具有自锁功能,其余设置为自复位按键。主要显示元件为数码管、指示灯和提示灯。其中,数码管显示无线遥控器和无线接收器的lora无线数据传输模块通信信道与地址;指示灯是无线遥控器中不由mcu直接控制的较大功率led,其中,急停指示灯和启动指示灯用于显示无线接收器对遥控器指令的响应状态,电量预警灯是对无线遥控器电池电压是否低于设定值的指示;提示灯是无线遥控器中由mcu引脚直接相连控制的小功率led,其中,工作提示灯是当无线遥控器正常工作时将规律性闪烁,以指示程序正常运行,常联提示灯是当第一lora无线数据传输模块正常连接并发送数据时将规律性闪烁,以指示数据正常发送。
69.在无线接收器中,较之无线遥控器,主要工作原件除供电网络、第二lora无线数据传输模块,还包括功率继电器和can输出模块。其中,功率继电器直接串联至无人赛车安全回路中,而无线接收器mcu可以通过控制引脚电平,经由mos管放大电路间接控制继电器断开,以达到断开无人赛车安全回路,完成急停操作。can输出模块经由终端电阻和共模电感接入无人赛车can通信网络,并经此将对应状态信息发送至赛车主控。
70.所述第一lora无线数据传输模块和第一lora无线数据传输模块的工作频率在410mhz~441mhz,以1mhz频率为步进信道,共32个信道,当调频至441hz时再按上调频按键时,工作频率将回归410hz。当调频至410hz时再按下调频按键时,工作频率将回归441hz。发射数据时内部环形fifo缓存512字节,内部自动分包发送,接收数据时同样内部环形fifo缓存512字节,内部自动分包发送。
71.如图7所示,上述的一种无人赛车遥控系统的遥控方式具体包括以下步骤:
72.步骤1:开启无线遥控器和无线接收器电源供应,在初始化后双方处于默认相同工作频率和工作模式,匹配成功后将建立连接;
73.步骤2:无线遥控器mcu内置的数模采集模块采集遥控器功能按键被按下时所产生
的电信号;
74.步骤3:无线遥控器mcu判断产生电信号按键,将电信号打包生成相应控制数据包,并将所述数据包发送给所述第一lora无线数据传输模块;
75.步骤4:第一lora无线数据传输模块接收到来自无线遥控器mcu发送的控制数据包,对控制数据包进行调制,并生成射频调制信号通过发送天线发送;
76.步骤5:第二lora无线数据传输模块通过接收天线接收到射频调制信号,并进行完整性分析,将其调制成控制数据包并分别返回信号值发送至无线接收器mcu;
77.步骤6:无线接收器mcu读取第二lora无线数据传输模块返回的控制数据包,对信息进行读取和判断,并执行相应功能;
78.步骤7:判断无线接收器mcu接收的信号是否为常联信号,若是,则进行步骤9和步骤17;
79.步骤8:判断无线接收器mcu接收的信号是否为启动信号,若是,则进行步骤9和步骤17;
80.步骤9:无线接收器mcu生成相应逻辑数据包通过所述can输出模块将状态信息发送至赛车主控;
81.步骤10:判断无线接收器mcu接收的信号是否为急停信号,若是,则进行步骤9、步骤11和步骤17;
82.步骤11:无线接收器mcu通过控制引脚电平,经由mos管放大电路间接控制所述功率继电器断开,以断开无人赛车安全回路。
83.步骤12:车辆急停,控制结束;
84.步骤13:判断无线接收器mcu接收的信号是否为调频信号,若是,则进行步骤14和步骤17;
85.步骤14:无线接收器mcu改变第二lora无线数据传输模块的工作频率;
86.步骤15:判断无线接收器mcu接收的信号是否为复位信号,若是,则进行步骤16和步骤17;
87.步骤16:无线接收器mcu将所有功能恢复至初始状态;
88.步骤17:无线接收器mcu整理响应反馈,将信息打包生成相应控制数据包,并将所述数据包发送给所述第二lora无线数据传输模块。模块对控制数据包进行调制,并生成射频调制信号通过发送天线发送;
89.步骤18:第一lora无线数据传输模块通过接收天线接收到射频调制信号,并进行完整性分析,将其调制成控制数据包并分别返回信号值发送至无线遥控器mcu;
90.步骤19:无线遥控器mcu读取第一lora无线数据传输模块返回的控制数据包,对信息进行读取和判断,并执行相应功能;
91.步骤20:判断无线遥控器mcu接收的信号是否为急停信号,若是,则进行步骤21;
92.步骤21:无线遥控器mcu拉高pa6引脚电平通过mos管放大电路间接控制急停指示灯常亮;
93.步骤22:判断无线遥控器mcu接收的信号是否为启动信号,若是,则进行步骤23;
94.步骤23:无线遥控器mcu拉高pb0引脚电平通过mos管放大电路间接控制启动指示灯常亮;
95.步骤24:判断无线遥控器mcu接收的信号是否为常联信号,若是,则进行步骤25;
96.步骤25:无线遥控器mcu通过规律性改变pb3引脚电平直接控制常联提示灯闪烁;
97.步骤26:判断无线遥控器mcu接收的信号是否为调频信号,若是,则进行步骤27;
98.步骤27:无线遥控器mcu通过规律性改变与数码管位选引脚和片选引脚相连引脚电平直接控制数码管的显示,并改变第一lora无线数据传输模块的工作频率;
99.步骤28:判断无线遥控器mcu接收的信号是否为复位信号,若是,则进行步骤29;
100.步骤29:无线遥控器mcu将所有功能恢复至初始值状态;
101.步骤30:无线遥控器mcu通过规律性改变pb4引脚电平直接控制工作提示灯闪烁;
102.步骤31:判断所设唤醒状态参数wake是否置1,若是,则进行步骤32;
103.步骤32:判断所设时间参数time所表示的时间是否大于2s,若是,则进行步骤9、步骤11;
104.步骤33:判断所设匹配状态参数flag所表示的时间是否大于2s,若是,则进行步骤34;
105.步骤34:判断所设时间参数time所表示的时间是否大于5s,若是,则进行步骤09、步骤11;
106.步骤35:无线遥控器mcu引脚pa1读取所述经分压电阻后的电池电压,并进行判断其值是否低于7.2v,若是,则进行步骤36;
107.步骤36:无线遥控器mcu拉高pa7引脚电平通过mos管放大电路间接控制电量预警灯常亮。
108.所述常联信号是指无线遥控器每隔一定时间向无线接收器发送的信号,是规律的,无功能性的,目的为保持双方的连接通信。所述功能信号则是按键按下时无线遥控器向无线接收器发送的信号,是无规律的,有功能性的,目的是完成特殊指令。
109.所述步骤9中,无线接收器mcu通过驱动系统can数据、处理与转发功能,数据发送至赛车的can通信网络中,由赛车主控读取。
110.所述步骤31中,所述唤醒状态参数是指示无线接收器是否正常匹配通信的参数。唤醒状态参数初始值为0,当无线遥控器和无线接收器匹配并成功通信后将其置1。当无线遥控器进行调频功能时,唤醒状态参数将重新置0,表示无线遥控器和无线接收器匹配中断。当经过调频后重新匹配成功时,唤醒状态参数将重新置1。
111.所述步骤32中,时间参数是指是指示无线接收器距离上一次成功接收到无线遥控器所发送射频信号的时间。每当无线接收器接收到一次信号,时间参数都会清零。
112.所述断电保护功能和信号丢失保护功能,是指在无线遥控器意外断电或无线遥控器信号意外丢失时,无线接收器需及时断开赛车安全回路并将状态信息发送给赛车主控,以使无人赛车急停,保证赛车行驶时车手和群众安全,防止意外发生。所述步骤31和步骤32即为具体实施步骤,其是指当无线遥控器和无线接收器在正常通信时,无线接收器距离上一次接收到射频信号时间超过预设值2s时,将通过步骤9、步骤1完成车辆急停。设置唤醒状态参数是防止在调频、重新配置第一lora无线数据传输模块和第二lora无线数据传输模块超出2s导致无线遥控器误触发急停操作。
113.所述步骤33中,匹配状态参数是指示无线接收器是否完成配对的参数。匹配状态参数参数初始值为0,当无线遥控器和无线接收器第一次匹配并成功通信后将其置1,并此
后将一直为1。
114.所述信号丢失保护功能还包括所述步骤33与步骤34,其是指在第一次匹配成功后,无线接收器距离上一次接收到射频信号时间超过预设值5s时,无线接收器需及时断开赛车安全回路并将状态信息发送给赛车主控,以使无人赛车急停。其用于当调频、重新配置第一lora无线数据传输模块和第二lora无线数据传输模块发生意外,双方无法重新匹配连接时,无线接收器能使赛车急停。
115.综上所述,本实施例提供的基于lora的无人车紧急制动遥控系统,可有效防止车辆出现突发状况导致脱离电脑控制造成意外的情况,另外,本实施例传系统的输距离可达三千米,信号接收较为稳定,并且可移植性较高,可以迁移到商用车上进行开发测试。
116.以上是对本实用新型的较佳实施进行了具体说明,但本实用新型并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1