一种基于BIM的轨道交通入侵警示装置的制作方法
一种基于bim的轨道交通入侵警示装置
技术领域
1.本实用新型属于警示装置技术领域,具体是一种基于bim的轨道交通入侵警示装置。
背景技术:
2.我国是个交通大国,尤其在轨道交通方面,轨道总公里数稳居世界第一,但是我国地貌复杂,很多轨道都设在人烟稀少地势险要的地方,很多轨道路段都要横穿隧道,在出隧道时,列车驾驶员很容易出现视觉空白,短暂性无法观察清楚隧道出口的情况,但是列车一般都是高速行驶状态,隧道出口处又极易因各种情况,在轨道上出现障碍物,从而威胁到列车的行车安全。
3.现有技术中,在轨道入侵警示方面,传统方法采用人工巡查的方式,定期地点对隧道出口处进行障碍物巡查,一旦发生有障碍物入侵轨道,及时汇报情况,并排出障碍物,采用这种方式,虽然比较直接有效,但是比较耗费人力,同时,险情随时可能发生,人力难免会有疏忽的时候,很可能就会造成很大的安全事故,针对上述情况,设计一种基于bim的轨道交通入侵警示装置。
技术实现要素:
4.为解决上述背景技术中提出的问题,本实用新型提供了一种基于bim的轨道交通入侵警示装置,具有检测效果好、检测范围广的优点。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于bim的轨道交通入侵警示装置,包括连接架,所述连接架底面左右端固定连接有支柱,两个所述支柱中间的上端固定连接有玻璃筒,左端所述支柱的左侧固定安装有第二电机,所述第二电机轴输出端固定连接有连接柱,所述连接柱外侧固定连接有激光测距仪,所述连接架左侧固定安装有第一电机,所述第一电机的轴输出端固定连接有螺纹柱,所述螺纹柱外侧螺旋连接有连接件,所述连接件底面固定连接有清洁套,所述连接架顶面的左端固定连接有控制模块。
6.上述技术方案中,优选的,所述控制模块包括有bim模块、自动控制模块,所述控制模块顶面上端固定安装有无线通信模块,所述连接架顶面右端固定安装有旋转监控摄像头,所述无线通信模块和旋转监控摄像头与控制模块电性连接。
7.上述技术方案中,优选的,所述连接架顶面固定安装有灯罩板,所述灯罩板与控制模块电性连接,所述灯罩板后端的右端设有绿灯,所述灯罩板后端的左端设有红灯。
8.上述技术方案中,优选的,左端所述支柱上端的前后侧固定安装有扬声器,所述扬声器与控制模块电性连接。
9.上述技术方案中,优选的,两个所述支柱底面固定连接有脚盘,所述脚盘上端螺旋连接有四个螺栓。
10.上述技术方案中,优选的,所述连接架底端开设有槽口,所述螺纹柱位于槽口内腔,所述螺纹柱左右端通过轴承与连接架连接,所述连接柱和激光测距仪套接在玻璃筒内
腔,所述清洁套活动套接在玻璃筒外侧。
11.上述技术方案中,优选的,所述连接柱左右端通过轴承与支柱连接,所述激光测距仪数量有十五个,所述连接柱前后均有八十五度旋转角度。
12.与现有技术相比,本实用新型的有益效果如下:
13.本实用新型通过第一电机、玻璃筒、旋转监控摄像头等结构,达到检测效果好的目的,通过激光测距仪旋转测距,检测是否有障碍物,同时通过间断性启动第一电机,带动螺纹柱旋转,从而带动清洁套的移动,清洁套清洁玻璃筒外侧的污垢,避免对激光测距仪测距造成影响,当有障碍物时,检测反馈后,红灯常亮,绿灯常闭,扬声器发出警告语音,并将数据反馈到远程控制端,远程控制端通过旋转监控摄像头,观察实时情况,判断是否继续执行执行动作,从而达到检测效果好。
14.本实用新型通过第二电机、激光测距仪、连接柱等结构,达到检测范围广的目的,每次清洁套清洁完毕后,第二电机自动启动,使得激光测距仪形成一个一百七十度的测距旋转角度,使得十五个激光测距仪检测到较广的轨道。
附图说明
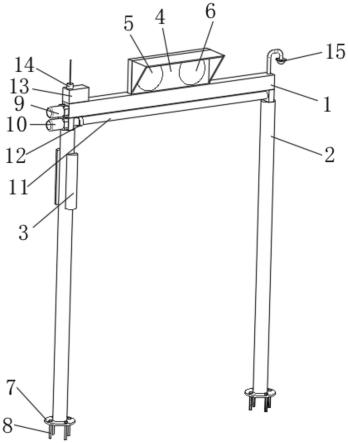
15.图1为本实用新型结构整体示意图;
16.图2为本实用新型结构上端示意图;
17.图3为本实用新型结构上端剖面示意图;
18.图4为本实用新型结构图3的a处放大示意图。
19.图中:1、连接架;2、支柱;3、扬声器;4、灯罩板;5、红灯;6、绿灯;7、脚盘;8、螺栓;9、第一电机;10、第二电机;11、玻璃筒;12、清洁套;13、控制模块;14、无线通信模块;15、旋转监控摄像头;16、槽口;17、激光测距仪;18、连接柱;19、螺纹柱;20、连接件。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如图1至图4所示,本实用新型提供一种基于bim的轨道交通入侵警示装置,包括连接架1,连接架1底面左右端固定连接有支柱2,两个支柱2中间的上端固定连接有玻璃筒11,左端支柱2的左侧固定安装有第二电机10,第二电机10轴输出端固定连接有连接柱18,连接柱18外侧固定连接有激光测距仪17,连接架1左侧固定安装有第一电机9,第一电机9的轴输出端固定连接有螺纹柱19,螺纹柱19外侧螺旋连接有连接件20,连接件20底面固定连接有清洁套12,连接架1顶面的左端固定连接有控制模块13。
22.如图1所示,控制模块13包括有bim模块、自动控制模块,控制模块13顶面上端固定安装有无线通信模块14,连接架1顶面右端固定安装有旋转监控摄像头,无线通信模块14和旋转监控摄像头与控制模块13电性连接;
23.采用上述方案:安装装置时,通过激光测距仪17旋转测量与轨道距离,建立bim模型,同时缓存入自动控制模块中作为初始数据,后每次实时测量数据与初始数据进行比较,
在设定值波动之内,正常继续工作,如果有障碍物入侵,实时测量超过波动,则自动控制模块启动执行元件进行动作,同时通过无线通信模块14将信息反馈到远程控制端,远程控制端同样可以通过无线通信模块14控制控制模块13所执行的动作,远程控制端通过旋转监控摄像头,观察实时情况,判断是否继续执行执行动作。
24.如图1所示,连接架1顶面固定安装有灯罩板4,灯罩板4与控制模块13电性连接,灯罩板4后端的右端设有绿灯6,灯罩板4后端的左端设有红灯5;
25.采用上述方案:当正常工作时,红灯5常闭,绿灯6常亮,当有障碍物入侵时,执行元件动作时,红灯5常亮,绿灯6常闭。
26.如图1所示,左端支柱2上端的前后侧固定安装有扬声器3,扬声器3与控制模块13电性连接;
27.采用上述方案:当正常工作时,扬声器3不工作,当有障碍物入侵时,执行元件动作时,扬声器3发出警告语音,对动物进行驱离。
28.如图1所示,两个支柱2底面固定连接有脚盘7,脚盘7上端螺旋连接有四个螺栓8;
29.采用上述方案:通过螺栓8将两个脚盘7固定安装在轨道两侧,使得激光测距仪17旋转测距能够检测到轨道上的障碍物。
30.如图2所示,连接架1底端开设有槽口16,螺纹柱19位于槽口16内腔,螺纹柱19左右端通过轴承与连接架1连接,连接柱18和激光测距仪17套接在玻璃筒11内腔,清洁套12活动套接在玻璃筒11外侧;
31.采用上述方案:通过间断性自动启动第一电机9,带动螺纹柱19旋转,从而带动清洁套12的移动,清洁套12清洁玻璃筒11外侧的污垢,避免对激光测距仪17测距造成影响。
32.如图3所示,连接柱18左右端通过轴承与支柱2连接,激光测距仪17数量有十五个,连接柱18前后均有八十五度旋转角度;
33.采用上述方案:每次清洁套12清洁完毕后,第二电机10自动启动,使得激光测距仪17形成一个一百七十度的测距旋转角度,使得十五个激光测距仪17检测到较广的轨道。
34.本实用新型的工作原理及使用流程:
35.安装装置时,通过螺栓8将两个脚盘7固定安装在轨道两侧,再通过激光测距仪17旋转测量与轨道距离,建立bim模型,同时缓存入自动控制模块中作为初始数据,后每次实时测量数据与初始数据进行比较,在设定值波动之内,正常继续工作,红灯5常闭,绿灯6常亮,扬声器3不工作;
36.通过间断性自动启动第一电机9,带动螺纹柱19旋转,由于连接件20与螺纹柱19螺旋连接,从而带动连接件20、清洁套12的左右移动,使得清洁套12清洁玻璃筒11外侧的污垢,每次清洁套12清洁完毕后,开始实时测量,第二电机10自动启动,带动连接柱18旋转,使得激光测距仪17形成一个一百七十度的测距旋转角度,如果有障碍物入侵,实时测量超过波动,则自动控制模块启动执行元件进行动作,红灯5常亮,绿灯6常闭,扬声器3发出警告语音,对动物进行驱离,同时通过无线通信模块14将信息反馈到远程控制端,远程控制端通过旋转监控摄像头,观察实时情况,判断是否继续执行执行动作。
37.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖
非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
38.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1