基于雷达的目标融合方法、装置、终端及存储介质与流程
本发明涉及雷达,尤其涉及一种基于雷达的目标融合方法、装置、终端及存储介质。
背景技术:
1、全息路口融合路口雷达及电警/卡口摄像机等多种感知设备,对路口车辆、人流信息进行实时感知监测,为管控人员提供“路口上帝视角”。
2、目前,全息路口主要采用雷达技术监测,但目前市面上全息路口雷达融合效果较差,监测误差范围仍旧较大。尤其是针对路口转弯目标,融合误差范围更大,频繁出现目标分裂现象,直接导致毫米波雷达融合效果大打折扣。
技术实现思路
1、有鉴于此,本发明提供了一种基于雷达的目标融合方法、装置、终端及存储介质,能够解决现有技术中交叉路口的目标融合效果差的问题。
2、第一方面,本发明实施例提供了一种基于雷达的目标融合方法,包括:
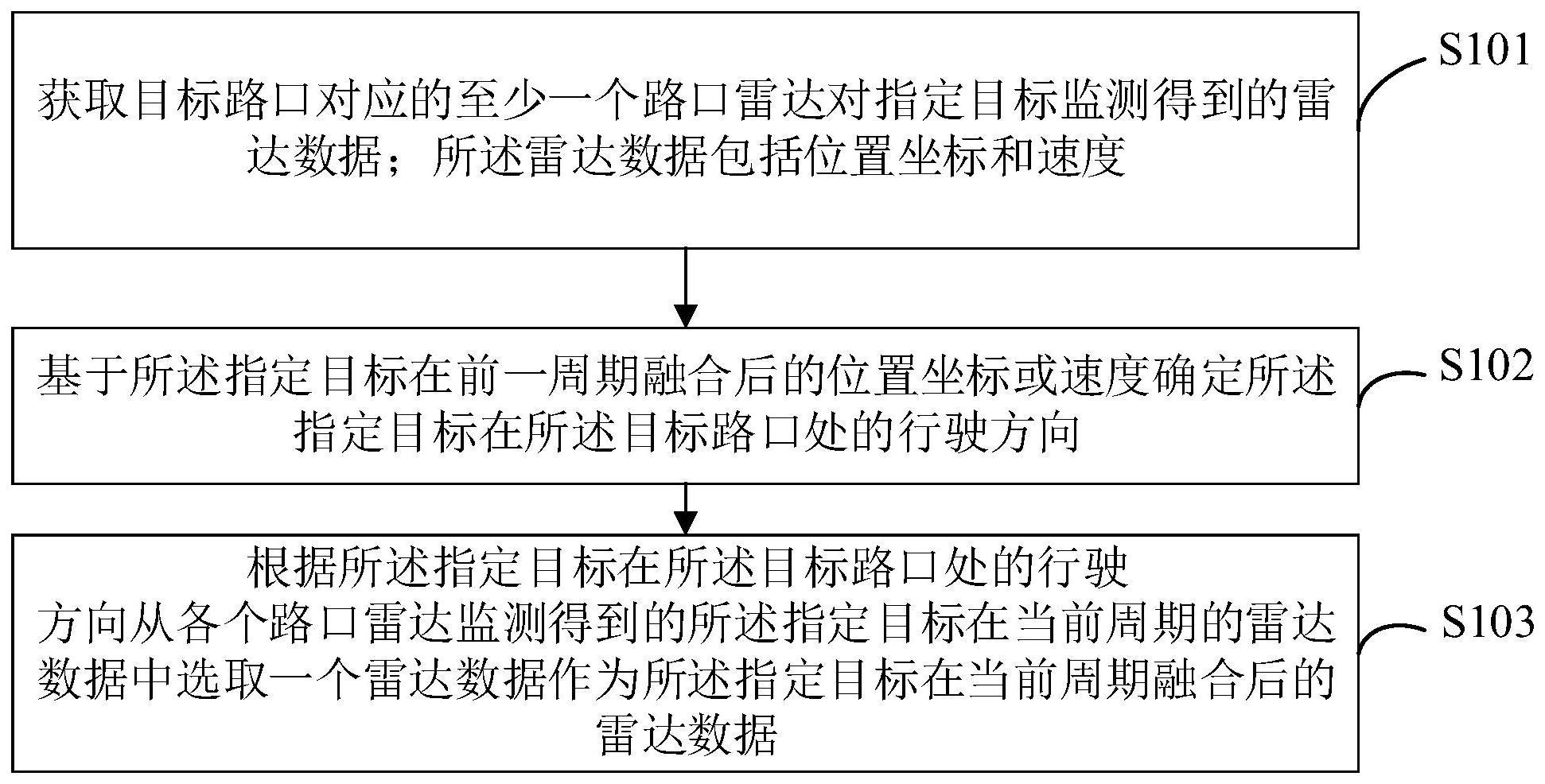
3、获取目标路口对应的至少一个路口雷达对指定目标监测得到的雷达数据;所述雷达数据包括位置坐标和速度;
4、基于所述指定目标在前一周期融合后的位置坐标或速度确定所述指定目标在所述目标路口处的行驶方向;
5、根据所述指定目标在所述目标路口处的行驶方向从各个路口雷达监测得到的所述指定目标在当前周期的雷达数据中选取一个雷达数据作为所述指定目标在当前周期融合后的雷达数据。
6、第二方面,本发明实施例提供了一种基于雷达的目标融合装置,包括:
7、雷达数据获取模块,用于获取目标路口对应的至少一个路口雷达对指定目标监测得到的雷达数据;所述雷达数据包括位置坐标和速度;
8、行驶方向确定模块,用于基于所述指定目标在前一周期融合后的位置坐标或速度确定所述指定目标在所述目标路口处的行驶方向;
9、数据融合模块,用于根据所述指定目标在所述目标路口处的行驶方向从各个路口雷达监测得到的所述指定目标在当前周期的雷达数据中选取一个雷达数据作为所述指定目标在当前周期融合后的雷达数据。
10、第三方面,本发明实施例提供了一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面任一种可能的实现方式所述方法的步骤。
11、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面任一种可能的实现方式所述方法的步骤。
12、本发明实施例与现有技术相比存在的有益效果是:
13、本发明实施例首先获取目标路口对应的至少一个路口雷达对指定目标监测得到的雷达数据;所述雷达数据包括位置坐标和速度;然后基于所述指定目标在前一周期融合后的位置坐标或速度确定所述指定目标在所述目标路口处的行驶方向;最后根据所述指定目标在所述目标路口处的行驶方向从各个路口雷达监测得到的所述指定目标在当前周期的雷达数据中选取一个雷达数据作为所述指定目标在当前周期融合后的雷达数据。通过上述方法,本实施例能够避免路口处多雷达目标融合时目标分裂的问题,从而提高目标融合效果。
技术特征:
1.一种基于雷达的目标融合方法,其特征在于,包括:
2.根据权利要求1所述的基于雷达的目标融合方法,其特征在于,在所述获取目标路口对应的至少一个路口雷达对指定目标监测得到的雷达数据之前,所述方法还包括:
3.根据权利要求1所述的基于雷达的目标融合方法,其特征在于,所述速度包括横向速度和纵向速度;
4.根据权利要求1所述的基于雷达的目标融合方法,其特征在于,所述位置坐标包括x坐标和y坐标;
5.根据权利要求1所述的基于雷达的目标融合方法,其特征在于,所述根据所述指定目标在所述目标路口处的行驶方向从各个路口雷达监测得到的所述指定目标在当前周期的雷达数据中选取一个雷达数据作为所述指定目标在当前周期融合后的雷达数据,包括:
6.根据权利要求1至5任一项所述的基于雷达的目标融合方法,其特征在于,所述位置坐标为路口坐标系下的位置坐标;在所述获取所述目标路口对应的各个路口雷达对指定目标监测得到的雷达数据之前,所述方法还包括:
7.根据权利要求2所述的基于雷达的目标融合方法,其特征在于,所述方法还包括:
8.一种基于雷达的目标融合装置,其特征在于,包括:
9.一种终端,其特征在于,包括处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序,执行如权利要求1至7中任一项所述的方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上的权利要求1至7中任一项所述方法的步骤。
技术总结
本发明提供了一种基于雷达的目标融合方法、装置、终端及存储介质,该方法包括:获取目标路口对应的至少一个路口雷达对指定目标监测得到的雷达数据;所述雷达数据包括位置坐标和速度;基于所述指定目标在前一周期融合后的位置坐标或速度确定所述指定目标在所述目标路口处的行驶方向;根据所述指定目标在所述目标路口处的行驶方向从各个路口雷达监测得到的所述指定目标在当前周期的雷达数据中选取一个雷达数据作为所述指定目标在当前周期融合后的雷达数据。通过上述方法,本申请能够避免路口处多雷达目标融合时目标分裂的问题,从而提高目标融合效果。
技术研发人员:黄小浦,杨若璋,袁亚运,姚磊,贾晓润,秦屹
受保护的技术使用者:森思泰克河北科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!