高速公路分车道可变限速控制方法、设备及介质
本发明涉及智慧高速和交通管理,尤其涉及一种高速公路分车道可变限速控制方法、设备及介质。
背景技术:
1、高速公路主线可变限速控制是目前解决高速公路拥堵的重要管控手段之一,已有研究表明可变限速控制能够有效缓解高速公路拥堵状态,减少交通事故的发生,提高道路通行效率。高速公路主线可变限速控制指在路侧每隔一段距离设置可变限速标志,道路控制中心基于实时的交通数据(流量、道路占有率、天气等)对各路段限速值进行优化调控,实现车速均匀化、交通流平稳化,提高通行能力,降低或避免交通事故的发生。目前国内外学者提出了诸多可变限速控制方法,但其大多仅针对单一的场景,如匝道入口上游等固定瓶颈路段、冰雪雨等不良天气下的可变限速控制方法等,应用于实际工程的方法鲜有。同时所提出的理论可行的方法其假设条件大都无法适应实际交通状况。
技术实现思路
1、本发明提供了一种高速公路分车道可变限速控制方法、设备及介质,以解决现有的可变限速控制方案无法适应实际交通状况的问题。
2、第一方面,提供了一种高速公路分车道可变限速控制方法,采用llesc-vsl(variable speed limit control method of lane level expressway withspatiotemporal continuity)可变限速控制方法,包括如下步骤:
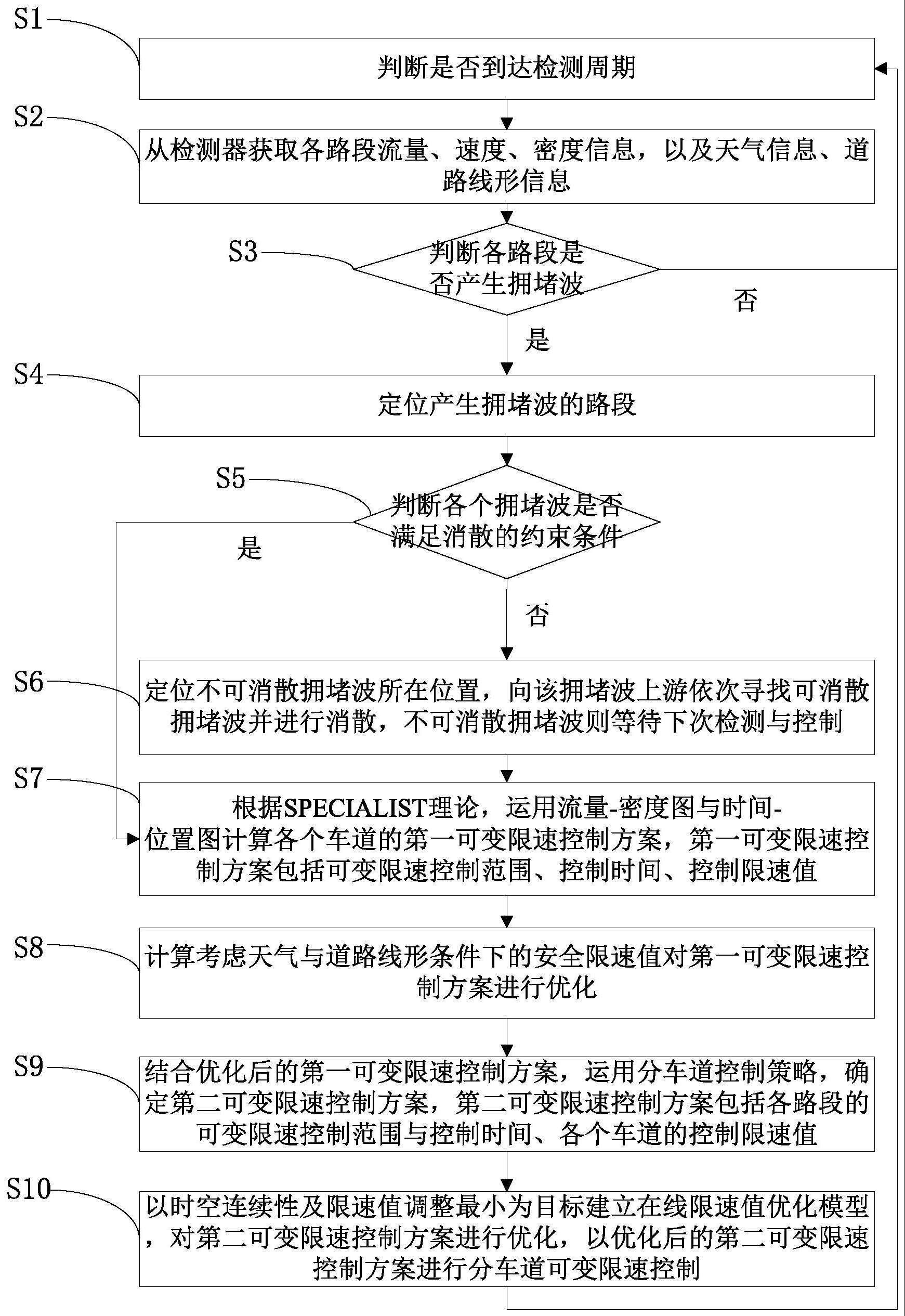
3、s1:判断是否到达检测周期;
4、s2:获取各路段流量、速度、密度信息,以及天气信息、道路线形信息;
5、s3:判断各路段是否产生拥堵波;如果产生则进入下一步,如果未产生则返回步骤s1;
6、s4:定位产生拥堵波的路段,并且将连续拥堵的路段合并,视为同一个拥堵波;
7、s5:判断各个拥堵波是否满足消散的约束条件,即判断各个产生拥堵波位置的上游自由流状态的范围是否能够为拥堵波提供足够的可变限速控制范围;如果不能消散则进入步骤s6,如果能够消散则进入步骤s7;
8、s6:定位不可消散拥堵波所在位置,向该拥堵波上游依次寻找可消散拥堵波并进行消散,不可消散拥堵波则等待下个检测周期检测与控制;
9、s7:根据specialist理论,运用流量-密度图与时间-位置图计算各个车道的第一可变限速控制方案,第一可变限速控制方案包括可变限速控制范围、控制时间、控制限速值;其中,specialist理论是一种基于拥堵波(冲击波)理论的能够有效消散拥堵波的算法;
10、s8:计算考虑天气与道路线形条件下的安全限速值进一步优化第一可变限速控制方案;
11、s9:结合优化后的第一可变限速控制方案,运用分车道控制策略,确定第二可变限速控制方案,第二可变限速控制方案包括各路段的可变限速控制范围与控制时间、各个车道的控制限速值;
12、s10:以控制限速值时空连续性最优为目标建立在线限速值优化模型,对第二可变限速控制方案进行优化,以优化后的第二可变限速控制方案进行分车道可变限速控制,并等待下一次检测周期。
13、根据第一方面,在一种可能的实现方式中,所述步骤s3中判断各路段是否产生拥堵波的过程包括:
14、将各路段平均密度、平均速度与所设阈值进行比较,若平均密度高于对应阈值且平均速度低于对应阈值则认为该路段存在拥堵波;
15、其中,阈值的确定规则如下:利用历史数据绘制可变限速控制区域内各路段流量-密度图,取各车道临界密度与临界速度的平均值或最大值或最小值作为对应阈值。
16、根据第一方面,在一种可能的实现方式中,所述步骤s7中,采用逐倍增加交通需求以计算流量和密度的方法绘制流量-密度图。
17、根据第一方面,在一种可能的实现方式中,绘制流量-密度图时,根据不同车道的车型比例不同,将流量数据转换为当量小车数绘制。
18、根据第一方面,在一种可能的实现方式中,所述运用分车道控制策略,确定第二可变限速控制方案,包括:
19、将得到的优化后每条车道的第一可变限速控制方案进行如下处理:针对控制限速值区分车道,则不进行调整;针对可变限速控制范围和控制时间不区分车道,则进行统一,统一方式如下:以路段为单位进行控制,取所有车道的可变限速控制范围、控制时间的最大值或最小值或平均值进行统一。
20、根据第一方面,在一种可能的实现方式中,所述在线限速值优化模型表示如下:
21、
22、
23、
24、vi,j(k)≤vw(k)
25、|vi,j(k)-vi,j(k-1)|≤δv
26、|vi,j(k)-vi-1,j(k)|≤δv
27、|vi,j(k-1)-vi-1,j(k)|≤δv
28、vi,j(k)≤vi,j+1(k)
29、其中,vctrl(k)为决策变量,表示第k个检测周期各个车道各个路段的控制限速值;表示第k个检测周期第i个路段第j个车道的控制限速值;表示第k个检测周期第i个路段第j个车道的理想限速值;α与β为权重系数;δv表示限速值变化幅度;vi,j(k)表示第k个检测周期第i个路段第j个车道的检测到的速度值;表示基于当前道路线形信息计算得到的安全限速值;vw(k)表示基于当前天气信息计算得到的安全限速值;j表示车道总数;n表示路段总数。
30、根据第一方面,在一种可能的实现方式中,还包括:
31、s01:根据高速公路信息构建可变限速控制仿真实验场景;
32、s02:考虑交通需求随机性与驾驶员遵从度随机性,以specialist理论中消散状态参数为决策变量,消散状态参数包括specialist理论中状态4和状态5的流量和密度,以高速公路主线总行程延误与高速公路主线交通事故发生次数为双目标评价指标,构建高速公路主线可变限速控制离线优化模型;
33、s03:获取高速公路历史交通数据代入到可变限速控制仿真实验场景进行仿真,仿真过程中,采用llesc-vsl可变限速控制方法进行分车道可变限速控制,并收集仿真评价数据,往复循环直至拥堵波消散或达到检测周期次数上限;
34、s04:基于收集的所有仿真评价数据,求解高速公路主线可变限速控制离线优化模型,得到最优消散状态参数,将得到的最优消散状态参数应用至llesc-vsl可变限速控制方法的步骤s7中。
35、根据第一方面,在一种可能的实现方式中,所述高速公路主线可变限速控制离线优化模型表示如下:
36、
37、
38、
39、d4>d5
40、
41、
42、q5>q1
43、d5>d1
44、其中,x为决策变量,x={d4,d5,q4,q5},d4、q4分别表示specialist理论中状态4的密度、流量;d5、q5分别表示specialist理论中状态5的密度、流量;dr指相对指标总行程延误,cr指相对指标交通事故发生次数;与分别表示交通需求随机性扰动系数与驾驶员遵从度扰动系数;ω表示决策变量x取值空间;e(·)表示期望取值;φ(·)表示仿真评价,→表示输出;llesc-vsl(·)表示采用llesc-vsl可变限速控制方法得到的可变限速控制方案;videal表示各检测周期的交通状态下的理想限速值合集;vctrl表示各检测周期的交通状态下的控制限速值合集;u表示各检测周期可变限速控制范围合集;t表示各检测周期可变限速控制时间合集;vfree表示自由流速度;d1、q1分别表示specialist理论中状态1的密度、流量。
45、第二方面,提供了一种电子设备,包括:
46、存储器,其存储有计算机程序;
47、处理器,调用并执行所述计算机程序时实现如上所述的高速公路分车道可变限速控制方法。
48、第三方面,提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的高速公路分车道可变限速控制方法。
49、本发明提出了一种高速公路分车道可变限速控制方法、设备及介质,以specialist理论为理论基础构建llesc-vsl可变限速控制方法,综合考虑了不良天气条件与不良道路线形条件下安全限速值,同时考虑了限速值时空连续性,是一种车道级的可变限速控制方案,能够同时消散多个拥堵波,能够适用于实际交通状况。另外,还提出了以specialist理论中拥堵波变化过程中的两个状态为决策变量,以高速公路可变限速控制范围内总行程延误与交通事故发生总次数最小为双目标,建立了交通需求不确定和驾驶员遵从程度不确定情况下的双目标高速公路主线可变限速控制离线优化模型,利用离线仿真及优化技术得到最优状态消散参数,然后应用至llesc-vsl可变限速控制方法,得到最优可变限速控制方案,能够对抗环境扰动,提高鲁棒性。本发明可以克服以往仅考虑单一影响因素的已有可变限速控制的缺陷,减少道路交通事故的同时有效提高道路交通运行效率,具有实际工程运用价值。
- 还没有人留言评论。精彩留言会获得点赞!